视频分享---------《无人机背后的PID控制》
在B站上看到有讲无人机自动控制方面的视频,感觉不错,分享下:
https://www.bilibili.com/video/BV1aW411E7Qq/?spm_id_from=333.788.videocard.1

---------------------------------------------------
看来这个才知道,有飞控的叫无人机,无飞控的叫航模(远程遥控飞机)。
原来无人机里面的飞控也是用的PID控制算法。
没有飞行控制器的飞机是难以稳定飞行的,因为它的飞行控制是需要人在远程进行操控的。人类在物理世界中驾驶的载人飞机其控制器其实就是驾驶员。
无人机的飞行状态由飞控器件来控制,人类只需要给出基本的指令,如:悬停,向前飞,向后方,向上飞,向下飞,向左飞,向右飞等指令,而具体的对电动机的控制则由飞控器件根据指令来进行操作。
无人机的控制示意图,个人猜测版:
四旋翼无人机大致长相如下:
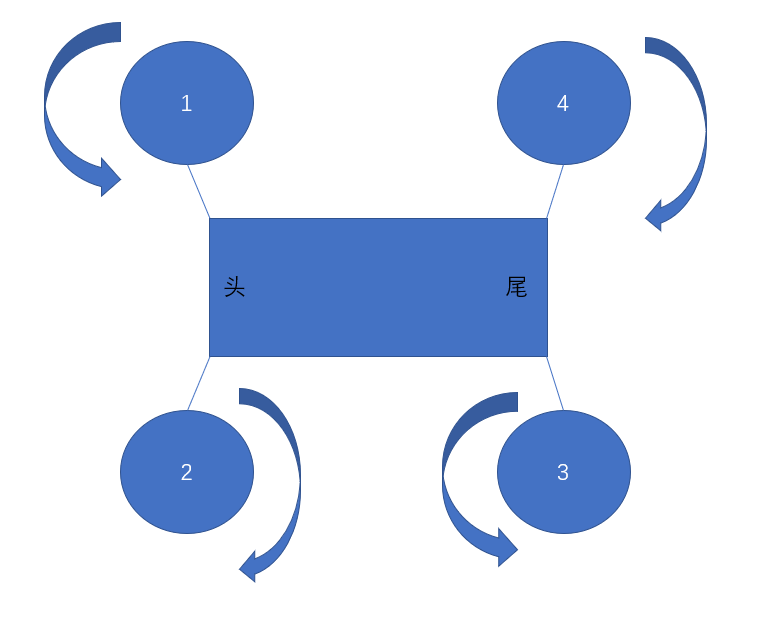
4旋翼无人机共有4个电动机螺旋桨,1号和3号是逆时针选择,2号和4号是顺时针选择。
悬停的时候1,2,3,4号电动机产生的升力之和和无人机的自身重力相当, 1,3号电动机产生的逆时针扭矩 与 2,4号电动机产生的顺时针扭矩相互抵消。
向前运动的时候,1,2号电动机减少旋转转数,3,4号增加旋转的转数,于是头向下倾斜,尾向上倾斜。顺逆时针扭矩相互抵消,升力与重力相抵消,并产生前向拉力。
向后运动的时候,1,2号电动机增加旋转转数,3,4号减少旋转的转数,于是头向上倾斜,尾向下倾斜。顺逆时针扭矩相互抵消,升力与重力相抵消,并产生前后拉力。
以头尾的中间线为轴:
向左运动的时候,2,3号电动机减少旋转转数,1,4号增加旋转的转数,于是机身向左下倾斜,尾向右上倾斜。顺逆时针扭矩相互抵消,升力与重力相抵消,并产生前左拉力。
向右运动的时候,1,4号电动机减少旋转转数,2,3号增加旋转的转数,于是机身向右下倾斜,尾向左上倾斜。顺逆时针扭矩相互抵消,升力与重力相抵消,并产生前右拉力。
以机身的中心点的垂直线为轴:
向左机身平面左转的时候,2,4号电动机减少旋转转数,1,3号增加旋转的转数,于是机身向左扭矩增加,机身向右扭矩减少。升力与重力相抵消,顺逆时针扭矩不能相互抵消,产生左转的扭矩。
向右机身平面右转的时候,1,3号电动机减少旋转转数,2,4号增加旋转的转数,于是机身向右扭矩增加,机身向左扭矩减少。升力与重力相抵消,顺逆时针扭矩不能相互抵消,产生右转的扭矩。
--------------------------------------------
视频分享---------《无人机背后的PID控制》的更多相关文章
- 一文读懂PID控制算法(抛弃公式,从原理上真正理解PID控制)
PID控制应该算是应用非常广泛的控制算法了.小到控制一个元件的温度,大到控制无人机的飞行姿态和飞行速度等等,都可以使用PID控制.这里我们从原理上来理解PID控制. PID(proportion ...
- 【iCore3应用开发平台】发布 iCore3 应用开发平台PID控制代码
说明:1.本代码包包含FPGA和STM32F407两部分内容2.FPGA工程为出厂代码FPGA工程,版本为REV43.STM32F407为只含PID控制的ARM工程4.在使用风扇过程中,请勿将手伸入扇 ...
- .net之工作流工程展示及代码分享(四)主控制类
现在应该讲主控制类了,为了不把系统弄得太复杂,所以就用一个类作为主要控制类(服务类),作为前端.后端.业务逻辑的控制类. WorkflowService类的类图如下: 该类的构造函数: public ...
- 两轮自平衡小车双闭环PID控制设计
两轮自平衡小车的研究意义 ...
- 关于python测试webservice接口的视频分享
现在大公司非常流行用python做产品的测试框架,还有对于一些快速原型产品的开发也好,很好地支持OO编程,代码易读.Python的更新挺快的,尤其是第三方库. 对于测试人员,代码基础薄弱,用pytho ...
- wordpress使用video.js与七牛云存储实现无广告视频分享应用
video.js是一款极受欢迎的基于HTML5的开源WEB视频播放器,其充分利用了HTML5的视频支持特性,可以实现全平台的无视频插件播放功能,对于现在流行的手机.PAD等移动智能终端有极佳的应用体验 ...
- 数字式PID控制的应用总结
PID控制是一个二阶线性闭环控制器,通过调整比例.积分和微分三项参数,使得大多数的工业控制系统获得良好的闭环控制性能.PID控制优点:a. 技术成熟,b. 易被人们熟悉和掌握,c. 不需要建立数学模型 ...
- PID控制学习笔记(二)
不管是基本的PID控制还是变形的PID控制算法,其核心都是对输入信号(设定值信号.测量信号或者偏差信号等)做基本的比例.积分.微分运算,最终提供给被控过程良好的调节信号. 在过程控制仪表,特别是在数字 ...
- SLAM+语音机器人DIY系列:(四)差分底盘设计——5.底盘PID控制参数整定
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达.IMU.麦克风.音响.摄像头这些通用部件可以直接买到,很难买到通用的底盘.一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的:另一方面是因为 ...
- MATLAB-离散系统的数字PID控制仿真
%PID Controller clear all; close all; ts=0.001; %采样时间=0.001s sys=tf(,]); %建立被控对象传递函数 dsys=c2d(sys,t ...
随机推荐
- P7448
problem & 双倍经验 & blog 低配版本 没有 Ynoi 标志性算法卡常,这点差评. 拆解问题 定义 \(lst_i\) 为上一个和 \(i\) 号点相同的位置. 由于几个 ...
- SRE 排障利器,接口请求超时试试 httpstat
夜莺资深用户群有人推荐的一个工具,看了一下真挺好的,也推荐给大家. 需求场景 A 服务调用 B 服务的 HTTP 接口,发现 B 服务返回超时,不确定是网络的问题还是 B 服务的问题,需要排查. 工具 ...
- reids分片技术cluster篇
为什么学redis-cluster 前面两篇文章,主从复制和哨兵机制保障了高可用 就读写分离,而言虽然slave节点扩展了主从的读并发能力 但是写能力和存储能力是无法进行扩展,就只能是master节点 ...
- 网络世界的脊柱——OSI七层模型
简介 OSI代表开放系统互联(Open Systems Interconnection),这是国际标准化组织(ISO)提出的一个概念模型,用于描述网络通信的功能划分.简单来说,OSI模型把复杂的网络通 ...
- flutter 调用环信sdk 实现即时通讯
首先下载依赖 导包 import 'package:im_flutter_sdk/im_flutter_sdk.dart';登录 import 'package:flutter/material.da ...
- 解析Html Canvas的卓越性能与高效渲染策略
一.什么是Canvas 想必学习前端的同学们对Canvas 都不陌生,它是 HTML5 新增的"画布"元素,可以使用JavaScript来绘制图形. Canvas元素是在HTML5 ...
- 认真学习css3--01-全是日志没有技术内容
由于某些原因,还是要写写前端代码. 虽然这不是我的主要责任,但也有表率的必要性. css3这个东西没有什么大难度,难点主要集中在: 1)样式比较多 2)精准定位 3)性能优化 其中第2个是日常经常面对 ...
- 打开ftp服务器上的文件夹时发生错误,请检查是否有权限访问该文件夹
产生这种现象有很多方面的原因 如果你能用命令行的方式访问ftp服务器,但是不能用资源管理器访问,那么请看下去. 1.打开IE浏览器,点击设置 2.点击Internet选项,进入高级 3.取消勾选 大功 ...
- shell 根据 指定列 进行 去除 重复行
根据指定列进行去除重复行 这里的重复是指如果两行的某一列数据相同,则认为是重复数据. 例如:第1行与第2行数据,其中的第2列(以- 作为分隔符)明显是重复的. 100069 - ARM Compile ...
- Linux 网络编程的5种IO模型 总结
背景 在网络编程中,经常会用到一些模型,在这里做一下总结. 正文 Linux 网络编程的5种IO模型:阻塞IO与非阻塞IO 这是最简单的模型,一般配合多线程来实现. Linux 网络编程的5种IO模型 ...