Ubuntu利用ROS搭建手机移动网络摄像头(Android)
| PC -> Ubuntu 16.04 - > ROS Kinetic |
| Android系统手机 |
1、Android移动端APP下载安装
配置手机端:(一般默认即可RTSP)
2、源码下载(rocon_devices_kinetic)
将文件解压在catkin_ws/src文件夹;
3、编译
catkin_make
4、配置
source xxx/devel/setup.bash (×××是路径)
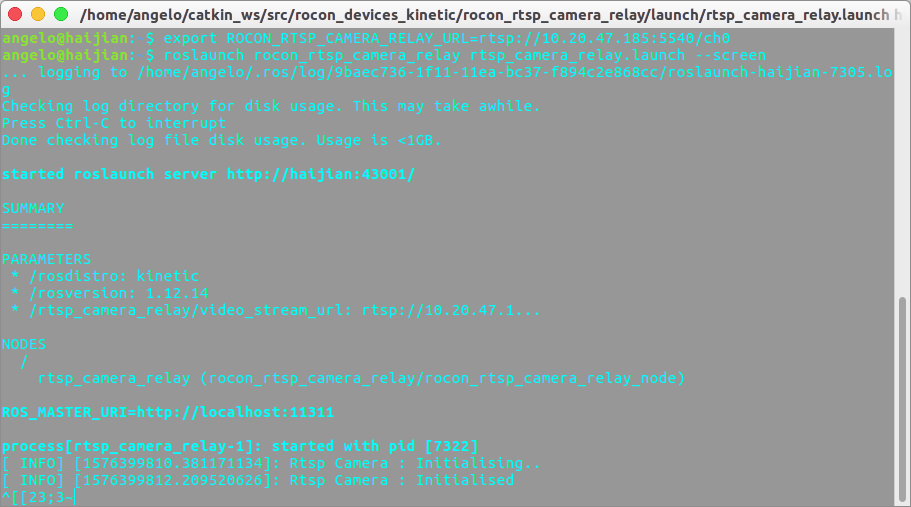
5、查看手机端接口,并配置
export ROCON_RTSP_CAMERA_RELAY_URL=rtsp://×××:5540/ch0 (×××是IP)
6、运行驱动
roslaunch rocon_rtsp_camera_relay rtsp_camera_relay.launch --screen
7、查看ros接口
rostopic list
/rosout
/rosout_agg
/rtsp_camera_relay/camera_info
/rtsp_camera_relay/image
/rtsp_camera_relay/image/compressed
/rtsp_camera_relay/image/compressed/parameter_descriptions
/rtsp_camera_relay/image/compressed/parameter_updates
/rtsp_camera_relay/image/compressedDepth
/rtsp_camera_relay/image/compressedDepth/parameter_descriptions
/rtsp_camera_relay/image/compressedDepth/parameter_updates
/rtsp_camera_relay/image/theora
/rtsp_camera_relay/image/theora/parameter_descriptions
/rtsp_camera_relay/image/theora/parameter_updates
/rtsp_camera_relay/status
8、数据可视化
rosrun image_view image_view image:=/rtsp_camera_relay/image

过程可能遇到错误:
error while loading shared libraries: libopencv_core3.so.3.3: cannot open shared object file: No such file or directory
解决方法:
①打开路径/etc/ld.so.conf.d
②创建文件OpenCV.conf
③在OpenCV.conf中写入:opencv文件夹lib的路径
④在终端执行命令:
sudo ldconfig
Ubuntu利用ROS搭建手机移动网络摄像头(Android)的更多相关文章
- 利用 Docker 搭建 IPFS 私有网络
利用 Docker 搭建 IPFS 私有网络 本文原始地址:https://sitoi.cn/posts/40630.html 下载项目 项目地址:https://github.com/Sitoi/p ...
- 利用 VMWare 搭建随机拓扑网络
这篇文章是计算机网络上机实验课的作业. 实验任务:利用 VMWare 搭建一个由 5 个主机组成的随机拓扑的网络.要求该网络中至少有 2 个子网,两个路由器 .实验的网络拓扑图如下: 网络中有两个路由 ...
- 利用CocoaHttpServer搭建手机本地服务器
原理 使用CocoaHTTPServer框架,在iOS端建立一个本地服务器,只要电脑和手机连入同一热点或者说网络,就可以实现通过电脑浏览器访问iOS服务器的页面,利用POST实现文件的上传. 实现 1 ...
- 基于opencv网络摄像头在ubuntu下的视频获取
基于opencv网络摄像头在ubuntu下的视频获取 1 工具 原料 平台 :UBUNTU12.04 安装库 Opencv-2.3 2 安装编译运行步骤 安装编译opencv-2.3 参 ...
- Ubuntu安装DroidCamX网络摄像头
1.安装依赖项 sudo apt-get install gcc make linux-headers-`uname -r` 2.安装 cd /tmp/ bits=`getconf LONG_BIT` ...
- Ubuntu虚拟机+ROS+Android开发环境配置笔记
Ubuntu虚拟机+ROS+Android开发环境配置笔记 虚拟机设置: 1.本地环境:Windows 7:VMWare:联网 2.虚拟环境 :Ubuntu 14.04. 比較稳定,且支持非常多ROS ...
- 安天透过北美DDoS事件解读IoT设备安全——Mirai的主要感染对象是linux物联网设备,包括:路由器、网络摄像头、DVR设备,入侵主要通过telnet端口进行流行密码档暴力破解,或默认密码登陆,下载DDoS功能的bot,运行控制物联网设备
安天透过北美DDoS事件解读IoT设备安全 安天安全研究与应急处理中心(安天CERT)在北京时间10月22日下午启动高等级分析流程,针对美国东海岸DNS服务商Dyn遭遇DDoS攻击事件进行了跟进分析. ...
- 如何在一个ubuntu系统上搭建SVN版本控制工具
有话说,由于公司项目部署需要,将Windows工程迁移到Linux,通过调查确定使用Ubuntu的Linux操作系统.那么如何快速搭建和Windows一样快捷方便的开发环境就很重要了.本文讲述如何在一 ...
- [原] 利用 OVS 建立 VxLAN 虚拟网络实验
OVS 配置 VxLAN HOST A ------------------------------------------ | zh-veth0(10.1.1.1) VM A | | ---|--- ...
随机推荐
- flask url_for后没有带端口号
问题描述: 在本地运行flask项目,当运行到下面这句代码时,正常重定向 return redirect(url_for('.script_case')) 但项目布署到服务器之后,代码运行一这句话,却 ...
- 阶段3 2.Spring_06.Spring的新注解_5 spring的新注解-PropertySource
数据库的链接 次数是写死的 新建配置文件 定义成员变量 value注解实现 与配置文件的key对应 PropertySource 要想让spring去读取这个配置文件 resource编译后都跑到了. ...
- zabbix日志报错解决
[root@bogon ldap]# cat /tmp/zabbix_server.log 9135:20181204:085433.351 using configuration file: /us ...
- 10 mysql选错索引
10 mysql选错索引 在mysql表中可以支持多个索引,有的sql不指定使用哪个索引,由mysql自己来决定,但是有时候mysql选错了索引,导致执行很慢. 例子 CREATE TABLE `t1 ...
- 【VS开发】ActiveX控件如何定制属性?
在很多场合下会存在这样的需求,那就是使用方在实际使用控件之前就想控件已经做了相应的处理比如加载的控件版本不正确等,或者需要在加载时才确定能够使用的功能集:这个时候传统的配置文件已经无法满足这种类型的需 ...
- MyBatis批量插入性能及问题
1.mybatis三种批量插入方式对比 2.Mybatis与JDBC批量插入MySQL数据库性能测试及解决方案 3.Mybatis批量插入引发的血案 4.Oracle批量插入数据SQL语句太长出错
- Spring MVC 跳转页面的方法
转一个Spring MVC 跳转页面的方法,楼主总结的很全面,留着备用. https://blog.csdn.net/c_royi/article/details/78528758
- [转帖]软件的变革与 AOT
软件的变革与 AOT https://www.colabug.com/851475.html 文章写的很牛B .. 前言 AOT 即 Ahead of Time Compilation,即运行前编,与 ...
- Go语言代码结构与语法基础(二)
任何一门语言,都是从打印 hello world 开始的. 最简单的go代码: package main // 声明 main 包,表明当前是一个可执行程序 import "fmt" ...
- [BZOJ1009] [HNOI2008] GT考试(KMP+dp+矩阵快速幂)
[BZOJ1009] [HNOI2008] GT考试(KMP+dp+矩阵快速幂) 题面 阿申准备报名参加GT考试,准考证号为N位数X1X2-.Xn,他不希望准考证号上出现不吉利的数字.他的不吉利数学A ...