arduino驱动步进电机
https://learn.adafruit.com/adafruit-motor-shield-v2-for-arduino/install-software
1安装库
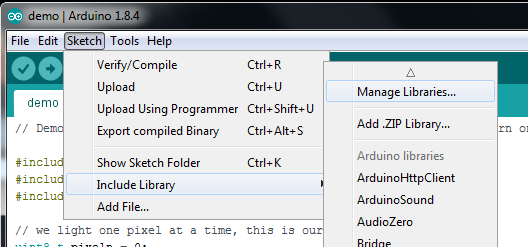
Adafruit_Motor_Shield_V2

2控制直流电机

您还必须提供5-12VDC为电动机供电。有两种方法可以做到这一点
您可以通过直流桶式插孔为Arduino供电,并在下面的绿色电源LED旁边插入显示为高黑色手柄的VIN跳线。
您可以通过DC Barrel插孔或 USB端口为Arduino供电。然后通过5-12VDC电机电源端子端口,绿色电源LED旁边的双端子块为屏蔽供电,并卸下VIN跳线

确认电机已正确连接并且电源LED点亮后,我们可以上载代码。
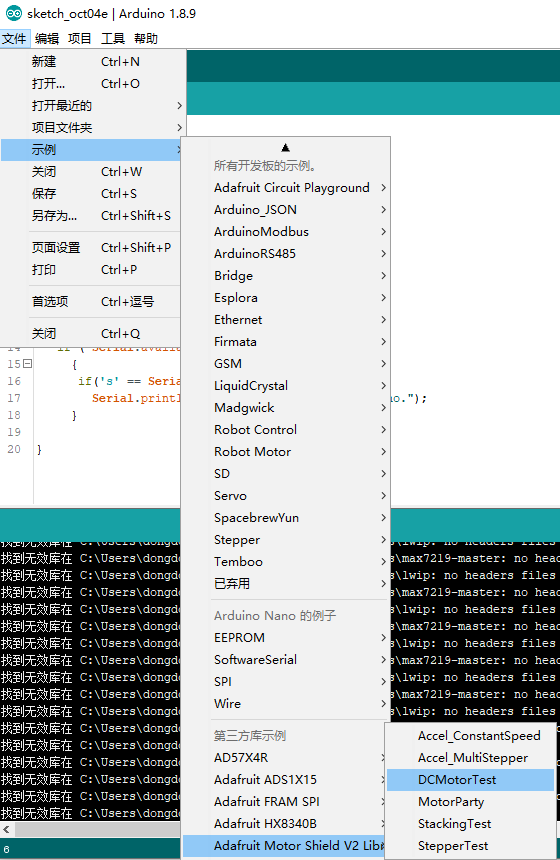
在IDE中,加载File-> Examples-> Adafruit_MotorShield-> DCMotorTest
您应该看到并听到DC电动机打开并前后移动的情况,并附上纸条或胶带作为“标志”,可以帮助您直观地查看运动情况。你看不到运动
步进电机测试
您也可以测试带屏蔽罩的步进电机连接。屏蔽层可以运行单极(5线和6线)和双极(4线)步进器。它不能与其他任何数量的电线一起运行步进器!单极或双极电机的代码相同,接线略有不同。
将屏蔽层插入Arduino,并将步进电机连接到电机端口2- 与DC电机不同,接线顺序很简单。连接到顶部的两个终端端口(线圈1)和底部的两个终端端口(线圈2)。
- 如果您使用的是双极电机,请不要连接到中间引脚(GND)。
- 如果使用5线制单极电机,则将公共线连接到GND。
- 如果您使用具有6线制的单极电机,则可以将两根“中心线圈线”连接到GND


确认电机已正确连接并且电源LED点亮后,我们可以上载代码。
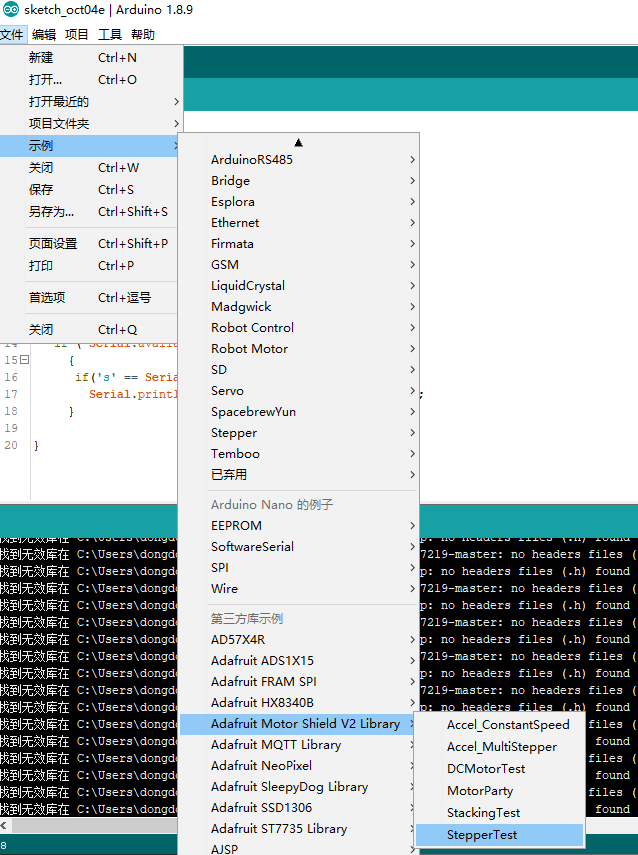
在IDE中,加载File-> Examples-> Adafruit_MotorShield-> StepperTest,
您应该看到并听到步进电机打开并前后移动的情况,并附上纸或胶带作为“标志”,可以帮助您直观地查看运动情况。您看不到运动。有四种移动步进器的方法,它们具有变化的速度,转矩和平滑度折衷。此示例代码将演示所有四个。
/*
This is a test sketch for the Adafruit assembled Motor Shield for Arduino v2
It won't work with v1.x motor shields! Only for the v2's with built in PWM
control For use with the Adafruit Motor Shield v2
----> http://www.adafruit.com/products/1438
*/ #include <Wire.h>
#include <Adafruit_MotorShield.h> // Create the motor shield object with the default I2C address
Adafruit_MotorShield AFMS = Adafruit_MotorShield();
// Or, create it with a different I2C address (say for stacking)
// Adafruit_MotorShield AFMS = Adafruit_MotorShield(0x61); // Connect a stepper motor with 200 steps per revolution (1.8 degree)
// to motor port #2 (M3 and M4)
Adafruit_StepperMotor *myMotor = AFMS.getStepper(200, 2); void setup() {
Serial.begin(9600); // set up Serial library at 9600 bps
Serial.println("Stepper test!"); AFMS.begin(); // create with the default frequency 1.6KHz
//AFMS.begin(1000); // OR with a different frequency, say 1KHz myMotor->setSpeed(10); // 10 rpm
} void loop() {
Serial.println("Single coil steps");
myMotor->step(100, FORWARD, SINGLE);
myMotor->step(100, BACKWARD, SINGLE); Serial.println("Double coil steps");
myMotor->step(100, FORWARD, DOUBLE);
myMotor->step(100, BACKWARD, DOUBLE); Serial.println("Interleave coil steps");
myMotor->step(100, FORWARD, INTERLEAVE);
myMotor->step(100, BACKWARD, INTERLEAVE); Serial.println("Microstep steps");
myMotor->step(50, FORWARD, MICROSTEP);
myMotor->step(50, BACKWARD, MICROSTEP);
}
arduino驱动步进电机的更多相关文章
- 使用Pretues仿真Arduino驱动步进电机
这几天想做一个给金鱼自动喂食的装置,所以学习了下如何操控步进电机,现在做个记录. 使用Pretues仿真Arduino的话,可以参考:http://www.geek-workshop.com/thre ...
- arduino中驱动 步进电机
参考:https://www.arduino.cn/thread-75936-1-1.html 知识点: 步进电机是一种将电脉冲转化为角位移的执行机构.通俗一点讲:当步进驱动器接收到一个脉冲信号 ...
- FPGA驱动步进电机
步进电机 步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛.在非超载的情况下,电机的转速.停止的位置只取决于脉冲信号的频率和脉冲数,而不受 ...
- arduino驱动安装
方法一:使用官方提供的一键安装程序安装 打开Arduino在你电脑上的位置如果你的电脑是32位系统,就运行dpinst-x86.exe如果是64位系统,就运行dpinst-amd64.exe然后在弹出 ...
- 使用Arduino驱动基于ST7533芯片的TFT屏
在合宙通信买了一个1.8寸的TFT屏,驱动芯片是ST7533,本来打算使用Air800直接驱动,但由于其他原因,放弃了.于是尝试使用arduino驱动,为了屏幕刷新速度更快,采用硬件SPI. 硬件连接 ...
- python代码实现树莓派3b+驱动步进电机
python代码实现树莓派3b+驱动步进电机 之前买了个树莓派,刚买回来那会儿热情高涨,折腾了一段时间,然后就放那吃灰了.前几天忽然想起来这个东西了,决定再玩玩儿,于是就从某宝上购买了一套步进电机.驱 ...
- Arduino ULN2009驱动步进电机
一.实物图 二.例子代码 注:代码来自老外 http://www.4tronix.co.uk/arduino/Stepper-Motors.php 功能:控制电机正反转 // This Arduino ...
- win8.1环境下安装arduino驱动问题解决方案
1. Windows 键+ R, 输入 shutdown.exe /r /o /f /t 00 2.此时电脑会自动重启,进入一下画面,选择Troubleshoot (转载请注明原处:http://ww ...
- 最新 Arduino 驱动 12接口/户外 LED显示屏/LED点阵屏/LED单元板
起因 现有的驱动LED显示屏的资料,比较好的只有这个.但是它驱动的是08接口的室内显示屏,而我要驱动的是12接口的户外显示屏.两种屏幕的区别在于户外屏幕点阵比较稀疏,而且二者的扫描方式,驱动方式都不太 ...
随机推荐
- Kubernetes 1.13 正式发布,功能亮点一览!
Kubernetes 1.13 正式发布,功能亮点一览! Kubernetes 1.13 正式GA,这是2018年发布的第四次也是最后一次大版本,1.13也是迄今为止发行最快的版本,仅用10周时间 ...
- aicoder实习svn内部培训教程
1 svn介绍 都已经用了git,为什么还要介绍svn呢?为了让aicoder.com的学员能够掌握多种的源代码管理工具的使用方法,更快的融入到项目开发中,特整理此文档. 1.1 项目管理中的版本控制 ...
- c# 自动给版本升级,遇9变0且前面一个版本加1
/// <summary> /// 版本辅助类 /// 创建人: /// 创建时间:2019-11-18 13:53:55 /// </summary> public clas ...
- 利用mysql的LOAD DATA INFILE的功能读取客户端文件
前言:今天在浏览某知论坛时,看到某大佬在渗透过程中使用伪造的MySQL服务端读取客户端文件,此大佬在利用过程中描述得不是很详细,作为小白的我看不懂啊,由此产生了此篇文章. 某大佬文章:https:// ...
- 2019年12月的第一个bug
现在是2019年12月1日0点27分,我的心情依旧难以平静.这个月是2019年的最后一个月,是21世纪10年代的最后一个月,也是第一批90后30岁以前的最后一个月.就是在这个月的第一天的0点0分,我写 ...
- 在eclipse中,用maven创建一个web项目工程
1.在eclipse中用maven创建项目,右键new>>Maven Project 2.点击next继续 3.点击next继续,选择maven-archetype-webapp, 4.点 ...
- 使用RunTime.getRunTime().addShutdownHook优雅关闭线程池
有时候我们用到的程序不一定总是在JVM里面驻守,可能调用完就不用了,释放资源. RunTime.getRunTime().addShutdownHook的作用就是在JVM销毁前执行的一个线程.当然这个 ...
- 使用Nginx反向代理Docker的Asp.Net Core项目的请求
承接上文的对Kestrel的思考 上一篇介绍了如何一下在docker中发布Asp.Net Core项目(传送门)在最后尝试从外网访问网站的时候发现请求的响应头中包含了这个信息Server:Kestre ...
- PLSQL 登录时弹出(没有登录)空白提示框
如题,在登录的时候莫名出现了plsql登录时弹出(没有登录)的空白提示框,在网上找了很多方法之后都不行,然后发现plsql的 oracle主目录名莫名的成了空,然后直接重新把它的目录设置上 重启pls ...
- JAVA WEB面试总结
本文目录: 1. 什么是cookie 2. 什么是session 3.什么是Servlet,Servlet生命周期方法 4.JSP隐含对象 5.JSP的四个域对象的作用范围 6.转发和重定向的区别 7 ...