关于RoI pooling 层
ROIs Pooling顾名思义,是pooling层的一种,而且是针对ROIs的pooling;
整个 ROI 的过程,就是将这些 proposal 抠出来的过程,得到大小统一的 feature map。
什么是ROI呢?(https://www.sogou.com/link?url=DOb0bgH2eKh1ibpaMGjuyy_CKu9VidU_Nm_z987mVIMm3Pojx-sH_PfgfR9iaaFcn666hxi--_g.)
ROI是Region of interest的简写,指的是faster rcnn结构中,经过rpn层后,产生的proposal对应的box框。
ROI Pooling的输入
输入有两部分组成:
1. data:指的是进入RPN层之前的那个Conv层的Feature Map,通常我们称之为“share_conv”;
2. rois:指的是RPN层的输出,一堆矩形框,形状为1x5x1x1(4个坐标+索引index),其中值得注意的是:坐标的参考系不是针对feature map这张图的,而是针对原图的(神经网络最开始的输入)
ROI Pooling的输出
输出是batch个vector,其中batch的值等于roi的个数,vector的大小为channelxwxh;ROI Pooling的过程就是将一个个大小不同的box矩形框,都映射成大小为wxh的矩形框;
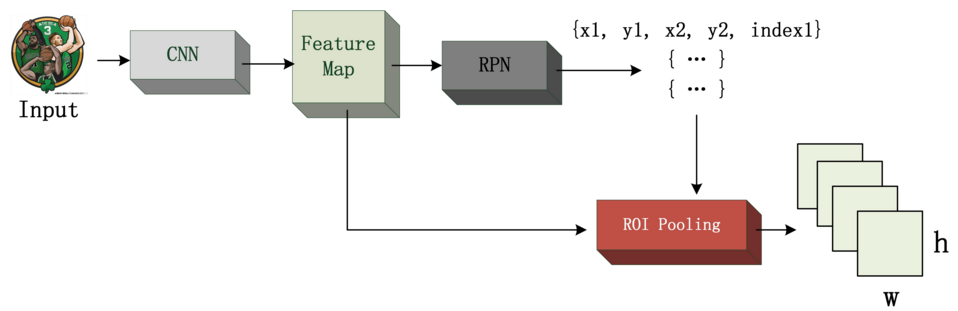
如图所示,我们先把roi中的坐标映射到feature map上,映射规则比较简单,就是把各个坐标除以输入图片与feature map的大小的比值,得到了feature map上的box坐标后,我们使用pooling得到输出;由于输入的图片大小不一,所以这里我们使用的spp pooling,spp pooling在pooling的过程中需要计算pooling后的结果对应的两个像素点反映社到feature map上所占的范围,然后在那个范围中进行取max或者取average。
---------------------
(https://www.sogou.com/link?url=44aejrzSKwWwrNJcKKLVtEK1rJUb32uHp37TwbVHvja5OaZX_AHBzQ..)
TensorFlow的pool layer是固定大小的
(https://www.sogou.com/link?url=DSOYnZeCC_rR_TP93bdO6GxT14t4sbuOSwJr4L_oLI5lf9NGYfOU6pULrym3hTBVtsCnpVGpPpA.)
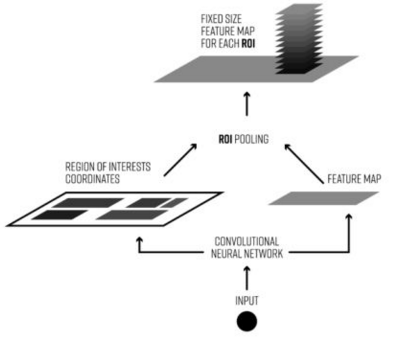
RoI Pooling就是实现从原图区域映射到conv5区域最后pooling到固定大小的功能。
输入,b0 为卷积的feature map,b1 为rois。
Reshape
Forward(向前传播)
backward(反向传播)
(https://www.sogou.com/link?url=DSOYnZeCC_rR_TP93bdO6GxT14t4sbuOSwJr4L_oLI5lf9NGYfOU6pULrym3hTBVtsCnpVGpPpA.)
我们知道在Faster R-CNN中,对于每个ROI(文中叫candidate object)主要有两个输出,一个输出是分类结果,也就是预测框的标签;另一个输出是回归结果,也就是预测框的坐标offset。而Mask R-CNN则是添加了第三个输出:object mask,也就说对每个ROI都输出一个mask,该支路是通过FCN网络(如Figure1中的两个卷积层)来实现的。以上这三个输出支路相互之间都是平行关系,相比其他先分割再分类的实例分割算法相比,这种平行设计不仅简单而且高效。
---------------------
作者:AI之路
来源:CSDN
原文:https://blog.csdn.net/u014380165/article/details/81878644
大致回顾下ROI Pool层的操作:
ROI Pool的输入是ROI的坐标和某一层的输出特征,不管是ROI Pool还是ROIAlign,目的都是提取输出特征图上该ROI坐标所对应的特征。RPN网络得到的ROI坐标是针对输入图像大小的,所以首先需要将ROI坐标缩小到输出特征对应的大小,假设输出特征尺寸是输入图像的1/16,那么先将ROI坐标除以16并取整(第一次量化),然后将取整后的ROI划分成H*W个bin(论文中是 7*7,有时候也用14*14),因为划分过程得到的bin的坐标是浮点值,所以这里还要将bin的坐标也做一个量化,具体而言对于左上角坐标采用向下取整,对于右下角坐标采用向上取整,最后采用最大池化操作处理每个bin,也就是用每个bin中的最大值作为该bin的值,每个bin都通过这样的方式得到值,最终输出的H*W大小的ROI特征。从这里的介绍可以看出ROI Pool有两次量化操作,这两步量化操作会引入误差。
---------------------
作者:AI之路
来源:CSDN
原文:https://blog.csdn.net/u014380165/article/details/81878644
关于RoI pooling 层的更多相关文章
- ROI Pooling层详解
目标检测typical architecture 通常可以分为两个阶段: (1)region proposal:给定一张输入image找出objects可能存在的所有位置.这一阶段的输出应该是一系列o ...
- 【ROI Pooling】ROI Pooling层详解(转)
原文链接:https://blog.deepsense.ai/region-of-interest-pooling-explained/ 目标检测typical architecture 通常可以分为 ...
- roi pooling层
roi pooling是先进行roi projection(即映射)然后再池化 映射是把用来训练的图片的roi映射到最后一层特征层(即卷积层).方法其实很简单,图片经过特征提取后,到最后一层卷积层时, ...
- Pytorch中RoI pooling layer的几种实现
Faster-RCNN论文中在RoI-Head网络中,将128个RoI区域对应的feature map进行截取,而后利用RoI pooling层输出7*7大小的feature map.在pytorch ...
- ROI POOLING 介绍
转自 https://blog.csdn.net/gbyy42299/article/details/80352418 Faster rcnn的整体构架: 训练的大致过程: 1.图片先缩放到MxN的尺 ...
- 【转】ROI Pooling
Faster rcnn的整体构架: 训练的大致过程: 1.图片先缩放到MxN的尺寸,之后进入vgg16后得到(W/16,H/16)大小的feature map: 2.对于得到的大小为(W/16,H/1 ...
- ROI pooling
R-CNN需要大量的候选框,对每个候选框都提取特征,速度很慢,无法做到实时检测,无法做到端到端.ROI pooling层实现training和testing的显著加速,并提高检测accuracy. R ...
- TensorFlow中max pooling层各参数的意义
官方教程中没有解释pooling层各参数的意义,找了很久终于找到,在tensorflow/python/ops/gen_nn_ops.py中有写: def _max_pool(input, ksize ...
- caffe之(二)pooling层
在caffe中,网络的结构由prototxt文件中给出,由一些列的Layer(层)组成,常用的层如:数据加载层.卷积操作层.pooling层.非线性变换层.内积运算层.归一化层.损失计算层等:本篇主要 ...
随机推荐
- android 打包工具
sdk.jar-修改路径-JarToDex-DexToSmali-复制文件
- Sybase to Oracle Golden Gate
Sybase 安装Golden Gate: 下载,然后create subdirs.并且在两端配置好mgr,设置好端口7809 创建golden gate用户ogguser,并且给它授权sa和repl ...
- GCC中的弱符号与强符号
GCC中的弱符号与强符号 我们经常在编程中碰到一种情况叫符号重复定义.多个目标文件中含有相同名字全局符号的定义,那么这些目标文件链接的时候将会出现符号重复定义的错误.比如我们在目标文件A和目标文件B都 ...
- 云上建站快速入门:博客、论坛、CMS、电子商务网站统统搞定
现在制作一个网站已经越来越容易了,只要知道清晰的流程之后都是可以很快的建好一个企业或者个人网站的!免费的建站程序很多,下面听哥给你亮出来,建站一般来说分主要有这四步:申请域名.申请虚拟主机.制作网页, ...
- [USACO17FEB] Why Did the Cow Cross the Road I P (树状数组求逆序对 易错题)
题目大意:给你两个序列,可以序列进行若干次旋转操作(两个都可以转),对两个序列相同权值的地方连边,求最少的交点数 记录某个值在第一个序列的位置,再记录第二个序列中某个值 在第一个序列出现的位置 ,求逆 ...
- shell试题
1.按单词出现频率降序排序! 2.按字母出现频率降序排序! The months of learning in Old Boy education are the few months that I ...
- python 递归算阶乘 (转载)
Python 递归函数 递归函数在函数内部,可以调用其他函数.如果一个函数在内部调用自身本身,这个函数就是递归函数.举个例子,我们来计算阶乘 n! = 1 * 2 * 3 * ... * n,用函数 ...
- MySQL的读写分离的几种选择
MySQL的读写分离的几种选择 MySQL主从复制(Master-Slave)与读写分离(MySQL-Proxy)实践 原址如下: http://heylinux.com/archives/1004. ...
- ./configure --prefix /?/? 解释
-- ./configure :编译源码 --prefix :把所有资源文件放在 之后的路径之后
- IDEA Maven Web项目 clone到本地导入到Eclipse中,启动服务器的时候会出现这个错误:SEVERE: Exception starting filter [hiddenHttpMethodFilter]
背景(Background): 我将一个IDEA的maven web项目clone到本地,并导入到Eclipse中. I imported a MAVEN WEB project which was ...