Java并发包源码学习系列:阻塞队列实现之SynchronousQueue源码解析
系列传送门:
- Java并发包源码学习系列:AbstractQueuedSynchronizer
- Java并发包源码学习系列:CLH同步队列及同步资源获取与释放
- Java并发包源码学习系列:AQS共享式与独占式获取与释放资源的区别
- Java并发包源码学习系列:ReentrantLock可重入独占锁详解
- Java并发包源码学习系列:ReentrantReadWriteLock读写锁解析
- Java并发包源码学习系列:详解Condition条件队列、signal和await
- Java并发包源码学习系列:挂起与唤醒线程LockSupport工具类
- Java并发包源码学习系列:JDK1.8的ConcurrentHashMap源码解析
- Java并发包源码学习系列:阻塞队列BlockingQueue及实现原理分析
- Java并发包源码学习系列:阻塞队列实现之ArrayBlockingQueue源码解析
- Java并发包源码学习系列:阻塞队列实现之LinkedBlockingQueue源码解析
- Java并发包源码学习系列:阻塞队列实现之PriorityBlockingQueue源码解析
- Java并发包源码学习系列:阻塞队列实现之DelayQueue源码解析
SynchronousQueue概述
SynchronousQueue是一个不存储元素的阻塞队列,每个插入的操作必须等待另一个线程进行相应的删除操作,反之亦然,因此这里的Synchronous指的是读线程和写线程需要同步,一个读线程匹配一个写线程。
你不能在该队列中使用peek方法,因为peek是只读取不移除,不符合该队列特性,该队列不存储任何元素,数据必须从某个写线程交给某个读线程,而不是在队列中等待倍消费,非常适合传递性场景。
SynchronousQueue的吞吐量高于LinkedBlockingQueue和ArrayBlockingQueue。
该类还支持可供选择的公平性策略,默认采用非公平策略,当队列可用时,阻塞的线程都可以争夺访问队列的资格。
使用案例
public class TestSync {
public static void main (String[] args) {
SynchronousQueue<Integer> queue = new SynchronousQueue<>(true);
Producer producer = new Producer(queue);
Customer customer = new Customer(queue);
producer.start();
customer.start();
}
}
class Producer extends Thread{
SynchronousQueue<Integer> queue;
Producer(SynchronousQueue<Integer> queue){
this.queue = queue;
}
@SneakyThrows
@Override
public void run () {
while(true){
int product = new Random().nextInt(500);
System.out.println("生产产品, id : " + product);
System.out.println("等待3s后给消费者消费...");
TimeUnit.SECONDS.sleep(3);
queue.put(product);
TimeUnit.MILLISECONDS.sleep(100);
}
}
}
class Customer extends Thread{
SynchronousQueue<Integer> queue;
Customer(SynchronousQueue<Integer> queue){
this.queue = queue;
}
@SneakyThrows
@Override
public void run () {
while(true){
Integer product = queue.take();
System.out.println("消费产品, id : " + product);
System.out.println();
}
}
}
// 打印结果
生产产品, id : 194
等待3s后给消费者消费...
消费产品, id : 194
生产产品, id : 140
等待3s后给消费者消费...
消费产品, id : 140
生产产品, id : 40
等待3s后给消费者消费...
消费产品, id : 40
类图结构

put与take方法
void put(E e)
public void put(E e) throws InterruptedException {
if (e == null) throw new NullPointerException();
// put方法 : e是生产者传递给消费者的元素
if (transferer.transfer(e, false, 0) == null) {
Thread.interrupted();
throw new InterruptedException();
}
}
E take()
public E take() throws InterruptedException {
// take方法: 表示消费者等待生产者提供元素
E e = transferer.transfer(null, false, 0);
if (e != null)
return e;
Thread.interrupted();
throw new InterruptedException();
}
put方法和take方法都调用了transferer的transfer方法,他们的区别在哪呢?我们可以发现:
- 当调用put方法,也就是生产者将数据传递给消费者时,传递的参数为e,是一个非null的元素。
- 而调用take方法,也就是消费者希望生产者提供元素时,传递的参数为null。
这一点必须明确,transfer是根据这一点来判断读or写线程,接着决定是否匹配等,直接来看下Transfer类吧。
Transfer
public class SynchronousQueue<E> extends AbstractQueue<E>
implements BlockingQueue<E>, java.io.Serializable {
private transient volatile Transferer<E> transferer;
}
SynchronousQueue内部维护了volatile修饰的Transferer变量,它的核心操作都将委托给transferer。
abstract static class Transferer<E> {
/**
* Performs a put or take.
*/
abstract E transfer(E e, boolean timed, long nanos);
}
Transferer类中定义了抽象方法transfer,该方法用于转移元素,是最最核心的方法,我们先大概了解一下定义:
- 参数e如果不为null,表示将该元素从生产者转移给消费者。如果为null,则表示消费者等待生产者提供元素,返回值E就是得到的元素。
- 参数timed表示是否设置超时,如果设置超时,nanos就是需要设置的超时时间。
- 该方法的返回值可以非null,就是消费者从生产者那得到的值,可以为null,代表超时或者中断,具体需要通过检测中断状态得到。
// 默认使用非公平策略
public SynchronousQueue() {
this(false);
}
/**
* 指定公平策略,
*/
public SynchronousQueue(boolean fair) {
transferer = fair ? new TransferQueue<E>() : new TransferStack<E>();
}
可以发现,在构造SynchronousQueue的时候,可以传入fair参数指定公平策略,有下面两种选择:
- 公平策略:实例化TransferQueue。
- 非公平策略:实例化TransferStack,默认就是非公平模式。
他俩便是Transfer类的实现,SynchronousQueue相关操作也都是基于这俩类的,我们接下来将会重点分析这俩的实现。
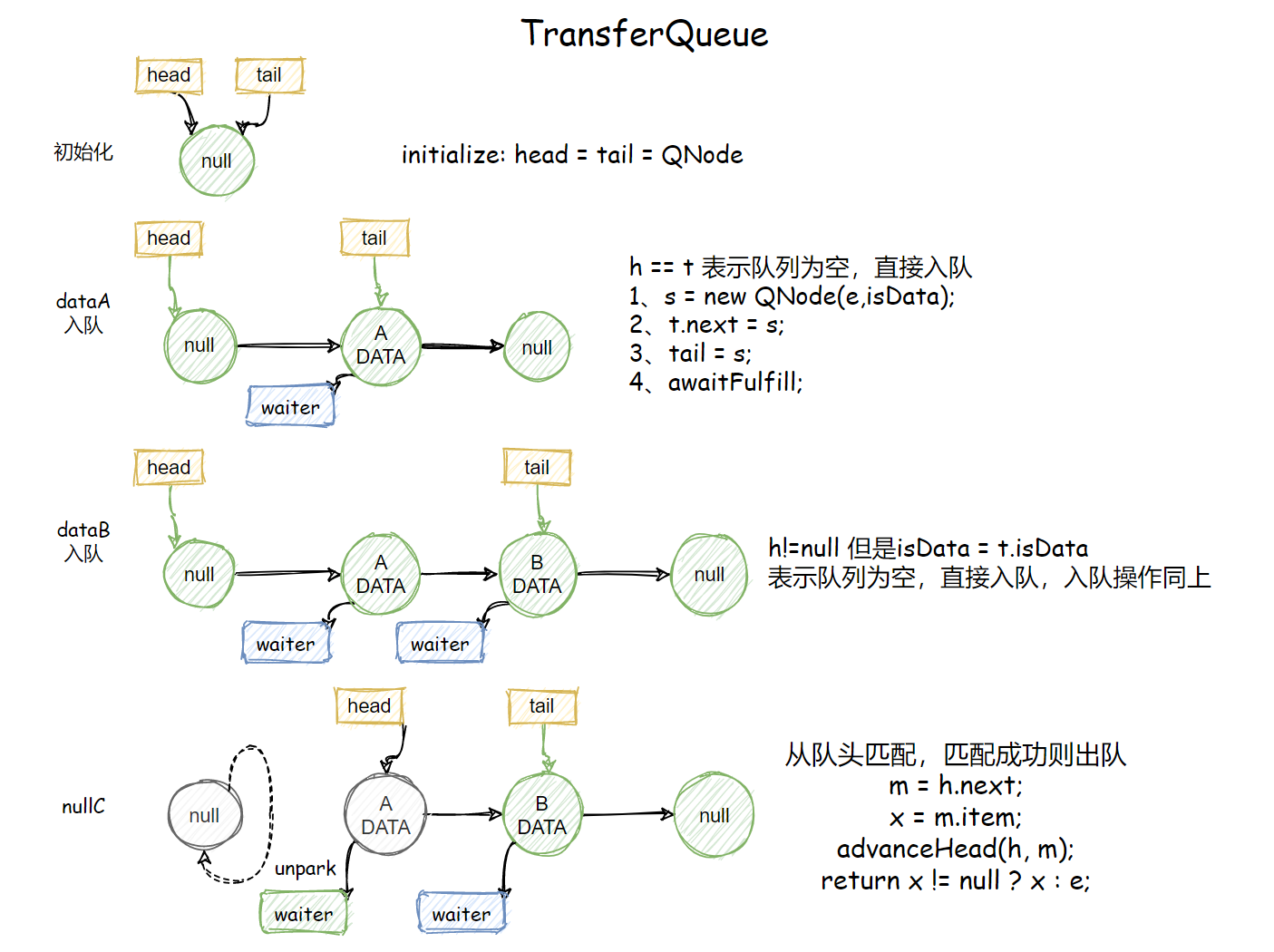
公平模式TransferQueue
static final class TransferQueue<E> extends Transferer<E> {
static final class QNode{...}
transient volatile QNode head;
transient volatile QNode tail;
transient volatile QNode cleanMe;
TransferQueue() {
QNode h = new QNode(null, false); // 初始化虚拟头节点
head = h;
tail = h;
}
QNode
QNode定义了队列中存放的节点:
- next指向下一个节点。
- item用于存放数据,数据修改通过CAS操作完成。
- waiter标记在该节点上等待的线程。
- isData用来标识该节点的类型,传递参数e不为null,则isData为true。
static final class QNode {
volatile QNode next; // next域
volatile Object item; // 存放数据,用CAS设置
volatile Thread waiter; // 标记在该节点上等待的线程是哪个
final boolean isData; // isData == true表示写线程节点
QNode(Object item, boolean isData) {
this.item = item;
this.isData = isData;
}
// ...省略一系列CAS方法
}
transfer
E transfer(E e, boolean timed, long nanos) {
QNode s = null; // constructed/reused as needed
// 判断当前节点的模式
boolean isData = (e != null);
// 循环
for (;;) {
QNode t = tail;
QNode h = head;
if (t == null || h == null) // saw uninitialized value
continue; // spin
// 队列为空 或 当前节点和队列尾节点类型相同,则将节点入队
if (h == t || t.isData == isData) { // empty or same-mode
QNode tn = t.next;
// 说明有其他节点入队,导致读到的tail不一致,continue
if (t != tail) // inconsistent read
continue;
// 有其他节点入队,但是tail是一致的,尝试将tn设置为尾节点,continue
if (tn != null) { // lagging tail
advanceTail(t, tn); // 如果tail为t,设置为tn
continue;
}
// timed == true 并且超时了, 直接返回null
if (timed && nanos <= 0) // can't wait
return null;
// 构建一个新节点
if (s == null)
s = new QNode(e, isData);
// 将当前节点插入到tail之后,如不成功,则continue
if (!t.casNext(null, s)) // failed to link in
continue;
// 将当前节点设置为新的tail
advanceTail(t, s); // swing tail and wait
// 这个方法下面会分析:自旋或阻塞线程,直到满足s.item != e
Object x = awaitFulfill(s, e, timed, nanos);
// x == s 表示节点被取消、中断或超时
if (x == s) { // wait was cancelled
clean(t, s);
return null;
}
// isOffList用于判断节点是否已经出队 next == this
if (!s.isOffList()) { // not already unlinked
// 尝试将s节点设置为head
advanceHead(t, s); // unlink if head
if (x != null) // and forget fields
s.item = s;
s.waiter = null;
}
return (x != null) ? (E)x : e;
// 队列不为空 且节点类型不同,一个读一个写,就可以匹配了
} else { // complementary-mode
// 队头节点
QNode m = h.next; // node to fulfill
// 这里如果其他线程对队列进行了操作,就重新再来
if (t != tail || m == null || h != head)
continue; // inconsistent read
// 下面是出队的代码
Object x = m.item;
//isData == (x != null) 判断isData的类型是否和队头节点类型相同
// x == m 表示m被取消了
// !m.casItem(x, e))表示将e设置为m的item失败
if (isData == (x != null) || // m already fulfilled
x == m || // m cancelled
!m.casItem(x, e)) { // lost CAS
// 上面三种情况,任意一种发生,都进行h的出队操作,m变成head,然后重试
advanceHead(h, m); // dequeue and retry
continue;
}
// 匹配成功,将m变为head,虚拟节点
advanceHead(h, m); // successfully fulfilled
// 唤醒在m上等待的线程
LockSupport.unpark(m.waiter);
// 得到数据
return (x != null) ? (E)x : e;
}
}
}
awaitFulfill
这个方法将会进行自旋或者阻塞,直到满足某些条件。
//Spins/blocks until node s is fulfilled.
Object awaitFulfill(QNode s, E e, boolean timed, long nanos) {
/* Same idea as TransferStack.awaitFulfill */
final long deadline = timed ? System.nanoTime() + nanos : 0L;
Thread w = Thread.currentThread();
// 计算需要自旋的次数
// 如果恰好 s 正好是第一个加入的节点,则会自旋一段时间,避免阻塞,提高效率
// 因为其他情况是会涉及到 park挂起线程的
int spins = ((head.next == s) ?
(timed ? maxTimedSpins : maxUntimedSpins) : 0);
for (;;) {
// w为当前线程,如果被中断了,则取消该节点
if (w.isInterrupted())
s.tryCancel(e);
Object x = s.item;
// 满足这个条件,才会退出循环,也是唯一的出口
// 如果 线程1、被阻塞,接着唤醒或者2、中断了,x != e 就会成立
if (x != e)
return x;
// 如果设置了timed,需要判断一下是否超时
if (timed) {
nanos = deadline - System.nanoTime();
// 如果超时,取消该节点,continue,下一次在 x!=e时退出循环
if (nanos <= 0L) {
s.tryCancel(e);
continue;
}
}
// 每次减少自旋次数
if (spins > 0)
--spins;
// 次数用完了,设置一下s的等待线程为当前线程
else if (s.waiter == null)
s.waiter = w;
// 没有超时设置的阻塞
else if (!timed)
LockSupport.park(this);
// 剩余时间小于spinForTimeoutThreshold的时候,自旋性能的效率更高
else if (nanos > spinForTimeoutThreshold)
LockSupport.parkNanos(this, nanos);
}
}
这边总结一下一些注意点:
- 为了优化阻塞,先判断当前的节点s是不是head.next,如果是的话,会优先选择自旋而不是阻塞,自旋次数到了才阻塞,主要是考虑到阻塞、唤醒需要消耗更多的资源。
- 自旋的过程如何退出,也就是何时满足x!=e的条件呢?其实在tryCancel的时候就会导致x!=e,因为该方法会将s的item设置为this。我们看到,线程被中断,超时的时候都会调用这个方法,这些条件下将会退出。
tryCancel
取消操作其实就是将节点的item设置为this,
void tryCancel(Object cmp) {
UNSAFE.compareAndSwapObject(this, itemOffset, cmp, this);
}
boolean isCancelled() {
return item == this;
}
也就是说,如果一旦执行了tryCancel操作【中断,取消,超时】,退出awaitFulfill之后,一定满足:
// x == s 表示节点被取消、中断或超时
if (x == s) { // wait was cancelled
clean(t, s);
return null;
}
会执行clean方法清理s节点:
clean
void clean(QNode pred, QNode s) {
s.waiter = null; // 清除thread引用
/*
* 无论何时,队列中的最后一个节点都无法删除,因此使用cleanMe保存它的前驱
*/
while (pred.next == s) {
QNode h = head;
QNode hn = h.next; // Absorb cancelled first node as head
// 队头被取消的情况,出队
if (hn != null && hn.isCancelled()) {
advanceHead(h, hn);
continue;
}
QNode t = tail; // Ensure consistent read for tail
if (t == h) // 队列此时为空,就退出了
return;
QNode tn = t.next;
if (t != tail) // 队尾并发改变了
continue;
// tn一直定位到为null
if (tn != null) {
advanceTail(t, tn);
continue;
}
// 这里 s!= t 表示没有到要删除的元素不是最后一个,
// 那么直接将pred.next = s.next就可以了
if (s != t) { // If not tail, try to unsplice
QNode sn = s.next;
if (sn == s || pred.casNext(s, sn))
// 删除完毕,退出
return;
}
// 走到这里,说明需要删除的s节点是队尾节点,需要使用cleanMe
QNode dp = cleanMe;
if (dp != null) { // Try unlinking previous cancelled node
// d这里指的就是 要删除的节点
QNode d = dp.next;
QNode dn;
if (d == null || // d is gone or
d == dp || // d is off list or
!d.isCancelled() || // d not cancelled or
(d != t && // d not tail and
(dn = d.next) != null && // has successor
dn != d && // that is on list
dp.casNext(d, dn))) // d unspliced
casCleanMe(dp, null); // 清除cleanMe
if (dp == pred)
return; // s is already saved node
// 该分支将dp定位到 pred的位置【第一次应该都会走到这】
} else if (casCleanMe(null, pred))
return; // Postpone cleaning s
}
}
注意:无论何时, 最后插入的节点不能被删除,因为直接删除会存在并发风险,当节点s是最后一个节点时, 将s.pred保存为cleamMe节点,下次再进行清除操作。
TransferQueue总结
transfer就是在一个循环中,不断地去做下面这些事情:
- 当调用transfer方法时,如果队列为空或队尾节点的类型和线程类型相同【t.isData== isData】,将当前线程加入队列,自旋的方式等待匹配。直到被匹配或超时,或中断或取消。
- 如果队列不为空且队中存在可以匹配当前线程的节点,将匹配的线程出队,重新设置队头,返回数据。
注意:无论是上面哪种情况,都会不断检测是否有其他线程在进行操作,如果有的话,会帮助其他线程执行入队出队操作。
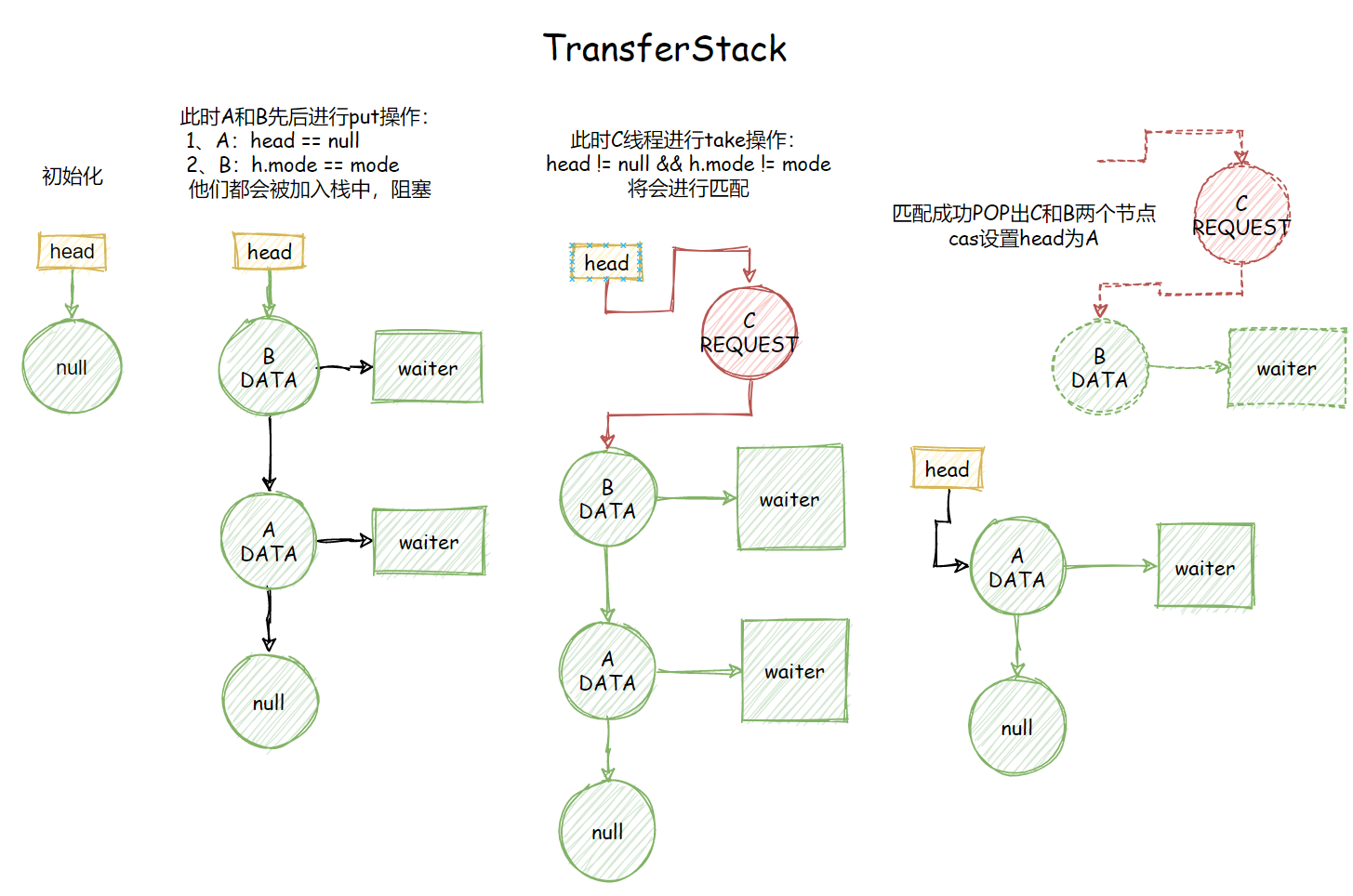
非公平模式TransferStack
TransferStack就大致过一下吧:
static final class TransferStack<E> extends Transferer<E> {
// 表示一个未匹配的消费者
static final int REQUEST = 0;
// 代表一个未匹配的生产者
static final int DATA = 1;
// 表示匹配另一个生产者或消费者
static final int FULFILLING = 2;
// 头节点
volatile SNode head;
// SNode节点定义
static final class SNode {...}
SNode
static final class SNode {
volatile SNode next; // next node in stack
volatile SNode match; // the node matched to this
volatile Thread waiter; // to control park/unpark
Object item; // data; or null for REQUESTs
int mode;
// Note: item and mode fields don't need to be volatile
// since they are always written before, and read after,
// other volatile/atomic operations.
SNode(Object item) {
this.item = item;
}
}
transfer
E transfer(E e, boolean timed, long nanos) {
SNode s = null; // constructed/reused as needed
int mode = (e == null) ? REQUEST : DATA; // e为null表示读,非null表示写
for (;;) {
SNode h = head;
// 如果栈为空,或者节点模式和头节点模式相同, 将节点压入栈
if (h == null || h.mode == mode) { // empty or same-mode
// 处理超时
if (timed && nanos <= 0) { // can't wait
if (h != null && h.isCancelled())
// 头节点弹出
casHead(h, h.next); // pop cancelled node
else
return null;
//未超时情况,生成snode节点,尝试将s设置为头节点
} else if (casHead(h, s = snode(s, e, h, mode))) {
// 自旋,等待线程匹配
SNode m = awaitFulfill(s, timed, nanos);
// 表示节点被取消、或中断、或超时
if (m == s) { // wait was cancelled
// 清理节点
clean(s);
return null;
}
if ((h = head) != null && h.next == s)
casHead(h, s.next); // help s's fulfiller
// 如果是请求数据,则返回匹配的item, 否则返回s的item
return (E) ((mode == REQUEST) ? m.item : s.item);
}
// 栈不为空, 且模式不相等,说明是一对匹配的节点
// 尝试用节点s 去满足 h, 这里判断 (m & FULFILLING) == 0会走这个分支
} else if (!isFulfilling(h.mode)) { // try to fulfill
// h已经被取消了
if (h.isCancelled()) // already cancelled
casHead(h, h.next); // pop and retry
// 将当前节点 标记为FULFILLING, 并设置为head
else if (casHead(h, s=snode(s, e, h, FULFILLING|mode))) {
for (;;) { // loop until matched or waiters disappear
// 这里m是头节点
SNode m = s.next; // m is s's match
// 说明被其他线程抢走了,重新设置head
if (m == null) { // all waiters are gone
casHead(s, null); // pop fulfill node
s = null; // use new node next time
break; // restart main loop
}
// 得到与m匹配的节点
SNode mn = m.next;
// 尝试去匹配,匹配成功会唤醒等待的线程
if (m.tryMatch(s)) {
// 匹配成功,两个都弹出
casHead(s, mn); // pop both s and m
// 返回数据节点的值 m.item
return (E) ((mode == REQUEST) ? m.item : s.item);
} else // lost match
s.casNext(m, mn); // help unlink
}
}
// 走到这,表示有其他线程在进行配对(m & FULFILLING) != 0
// 帮助进行匹配,接着执行出栈操作
} else { // help a fulfiller
SNode m = h.next; // m is h's match
if (m == null) // waiter is gone
casHead(h, null); // pop fulfilling node
else {
SNode mn = m.next;
if (m.tryMatch(h)) // help match
casHead(h, mn); // pop both h and m
else // lost match
h.casNext(m, mn); // help unlink
}
}
}
}
TransferStack总结
transfer方法其实就是在一个循环中持续地去做下面三件事情:
- 当调用transfer时,如果栈是空的,或者当前线程类型和head节点类型相同,则将当前线程加入栈中,通过自旋的方式等待匹配。最后返回匹配的节点,如果被取消,则返回null。
- 如果栈不为空,且有节点可以和当前线程进行匹配【读与写表示匹配,mode不相等】,CAS加上
FULFILLING标记,将当前线程压入栈顶,和栈中的节点进行匹配,匹配成功,出栈这两个节点。 - 如果栈顶是正在进行匹配的节点
isFulfilling(h.mode),则帮助它进行匹配并出栈,再执行后续操作。
总结
SynchronousQueue是一个不存储元素的阻塞队列,每个插入的操作必须等待另一个线程进行相应的删除操作,反之亦然,因此这里的Synchronous指的是读线程和写线程需要同步,一个读线程匹配一个写线程。
该类还支持可供选择的公平性策略,针对不同的公平性策略有两种不同的Transfer实现,TransferQueue实现公平模式和TransferStack实现非公平模式。
take和put操作都调用了transfer核心方法,根据传入的参数e是否为null来对应处理。
最后:Synchronous好抽象啊,好难懂,有很多地方画了图也是很难理解,如有不足,望评论区指教。
参考阅读
《Java并发编程的艺术》
《Java并发编程之美》
Java并发包源码学习系列:阻塞队列实现之SynchronousQueue源码解析的更多相关文章
- Java并发包源码学习系列:JDK1.8的ConcurrentHashMap源码解析
目录 为什么要使用ConcurrentHashMap? ConcurrentHashMap的结构特点 Java8之前 Java8之后 基本常量 重要成员变量 构造方法 tableSizeFor put ...
- Java并发包源码学习系列:阻塞队列BlockingQueue及实现原理分析
目录 本篇要点 什么是阻塞队列 阻塞队列提供的方法 阻塞队列的七种实现 TransferQueue和BlockingQueue的区别 1.ArrayBlockingQueue 2.LinkedBloc ...
- Java并发包源码学习系列:阻塞队列实现之ArrayBlockingQueue源码解析
目录 ArrayBlockingQueue概述 类图结构及重要字段 构造器 出队和入队操作 入队enqueue 出队dequeue 阻塞式操作 E take() 阻塞式获取 void put(E e) ...
- Java并发包源码学习系列:阻塞队列实现之LinkedBlockingQueue源码解析
目录 LinkedBlockingQueue概述 类图结构及重要字段 构造器 出队和入队操作 入队enqueue 出队dequeue 阻塞式操作 E take() 阻塞式获取 void put(E e ...
- Java并发包源码学习系列:阻塞队列实现之PriorityBlockingQueue源码解析
目录 PriorityBlockingQueue概述 类图结构及重要字段 什么是二叉堆 堆的基本操作 向上调整void up(int u) 向下调整void down(int u) 构造器 扩容方法t ...
- Java并发包源码学习系列:阻塞队列实现之DelayQueue源码解析
目录 DelayQueue概述 类图及重要字段 Delayed接口 Delayed元素案例 构造器 put take first = null 有什么用 总结 参考阅读 系列传送门: Java并发包源 ...
- Java并发包源码学习系列:阻塞队列实现之LinkedTransferQueue源码解析
目录 LinkedTransferQueue概述 TransferQueue 类图结构及重要字段 Node节点 前置:xfer方法的定义 队列操作三大类 插入元素put.add.offer 获取元素t ...
- Java并发包源码学习系列:阻塞队列实现之LinkedBlockingDeque源码解析
目录 LinkedBlockingDeque概述 类图结构及重要字段 linkFirst linkLast unlinkFirst unlinkLast unlink 总结 参考阅读 系列传送门: J ...
- Java并发包源码学习系列:基于CAS非阻塞并发队列ConcurrentLinkedQueue源码解析
目录 非阻塞并发队列ConcurrentLinkedQueue概述 结构组成 基本不变式 head的不变式与可变式 tail的不变式与可变式 offer操作 源码解析 图解offer操作 JDK1.6 ...
随机推荐
- 关于客户和供应商预制凭证添加WBS字段
客户和供应商的预制凭证的对应标准屏幕SAPLF0400301和SAPLF0400302并没有提供WBS字段,有的需求需要增强WBS字段到屏幕上,本文会介绍增强WBS字段的步骤,也请读者多多指教.为了不 ...
- 对象、对象监视器、同步队列、执行线程关系(synchronized的实现细节或原理)
synchronized在使用的时候底层细节你了解吗,相信很多同学对细节很少关注:比如竞争失败了的线程怎么安置,每个对象的监视器,线程执行synchronized时,其实是获取对象的监视器才能进入同步 ...
- UNION An Unreferenced Metric for Evaluating Open-ended Story Generation精读
UNION An Unreferenced Metric for Evaluating Open-ended Story Generation精读 UNION: 一种评估开放故事生成无参考文本依赖me ...
- SpringBoot+Prometheus+Grafana实现应用监控和报警
一.背景 SpringBoot的应用监控方案比较多,SpringBoot+Prometheus+Grafana是目前比较常用的方案之一.它们三者之间的关系大概如下图: 关系图 二.开发SpringBo ...
- Asp.net Core 2.0 实现Cookie会话
与1.0版本相比微软做了一些调整.详细请参考官方文档,我这里就讲2.0的吧 1.首先要在 根目录下 Startup.cs 类中启用 cookie会话,有两处要配置 第一处在 public void ...
- 解析SwiftUI布局细节(二)循环轮播+复杂布局
前言 上一篇我们总结的主要是VStack里面的东西,由他延伸到 @ViewBuilder, 接着我们上一篇总结的我们这篇内容主要说的是下面的几点,在这些东西说完后我准备解析一下苹果在SiwftUI文档 ...
- Sublime Text 3 习惯插件 转
原帖:https://www.cnblogs.com/hykun/p/sublimeText3.html Emmet插件 Emmet插件可以说是使用Sublime Text进行前端开发必不可少的插件 ...
- Win Docker 安装C盘清理方法之一
背景 由于Docker默认安装到C盘,C盘空间越发的小了,虽然(win10)C盘满了并不会很大影响,但是强迫症患者是不能忍得 解决办法 查询https://stackoverflow.com/ques ...
- i5 11300H 怎么样 相当于什么水平
i5-11300H 为 4 核 8 线程,主频 3.1GHz,睿频 4.4GHz,三级缓存 8MBi5-11300H 怎么样看完你就知道了 https://list.jd.com/list.html?
- 关于maven多module的依赖问题
之前的项目因为历史的原因,都是一个project里只包含了一个module,今年进入了新的项目组,出现了多个module,最近刚好也是在学<maven实战>因此想要将这个东西记录下来 工程 ...