python数字图像处理(16):霍夫圆和椭圆变换
在极坐标中,圆的表示方式为:
x=x0+rcosθ
y=y0+rsinθ
圆心为(x0,y0),r为半径,θ为旋转度数,值范围为0-359
如果给定圆心点和半径,则其它点是否在圆上,我们就能检测出来了。在图像中,我们将每个非0像素点作为圆心点,以一定的半径进行检测,如果有一个点在圆上,我们就对这个圆心累加一次。如果检测到一个圆,那么这个圆心点就累加到最大,成为峰值。因此,在检测结果中,一个峰值点,就对应一个圆心点。
霍夫圆检测的函数:
skimage.transform.hough_circle(image, radius)
radius是一个数组,表示半径的集合,如[3,4,5,6]
返回一个3维的数组(radius index, M, N), 第一维表示半径的索引,后面两维表示图像的尺寸。
例1:绘制两个圆形,用霍夫圆变换将它们检测出来。
import numpy as np
import matplotlib.pyplot as plt
from skimage import draw,transform,feature img = np.zeros((250, 250,3), dtype=np.uint8)
rr, cc = draw.circle_perimeter(60, 60, 50) #以半径50画一个圆
rr1, cc1 = draw.circle_perimeter(150, 150, 60) #以半径60画一个圆
img[cc, rr,:] =255
img[cc1, rr1,:] =255 fig, (ax0,ax1) = plt.subplots(1,2, figsize=(8, 5)) ax0.imshow(img) #显示原图
ax0.set_title('origin image') hough_radii = np.arange(50, 80, 5) #半径范围
hough_res =transform.hough_circle(img[:,:,0], hough_radii) #圆变换 centers = [] #保存所有圆心点坐标
accums = [] #累积值
radii = [] #半径 for radius, h in zip(hough_radii, hough_res):
#每一个半径值,取出其中两个圆
num_peaks = 2
peaks =feature.peak_local_max(h, num_peaks=num_peaks) #取出峰值
centers.extend(peaks)
accums.extend(h[peaks[:, 0], peaks[:, 1]])
radii.extend([radius] * num_peaks) #画出最接近的圆
image =np.copy(img)
for idx in np.argsort(accums)[::-1][:2]:
center_x, center_y = centers[idx]
radius = radii[idx]
cx, cy =draw.circle_perimeter(center_y, center_x, radius)
image[cy, cx] =(255,0,0) ax1.imshow(image)
ax1.set_title('detected image')
结果图如下:原图中的圆用白色绘制,检测出的圆用红色绘制。

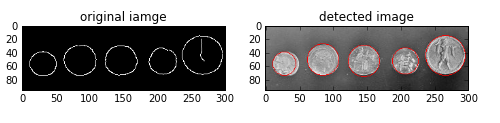
例2,检测出下图中存在的硬币。

import numpy as np
import matplotlib.pyplot as plt
from skimage import data, color,draw,transform,feature,util image = util.img_as_ubyte(data.coins()[0:95, 70:370]) #裁剪原图片
edges =feature.canny(image, sigma=3, low_threshold=10, high_threshold=50) #检测canny边缘 fig, (ax0,ax1) = plt.subplots(1,2, figsize=(8, 5)) ax0.imshow(edges, cmap=plt.cm.gray) #显示canny边缘
ax0.set_title('original iamge') hough_radii = np.arange(15, 30, 2) #半径范围
hough_res =transform.hough_circle(edges, hough_radii) #圆变换 centers = [] #保存中心点坐标
accums = [] #累积值
radii = [] #半径 for radius, h in zip(hough_radii, hough_res):
#每一个半径值,取出其中两个圆
num_peaks = 2
peaks =feature.peak_local_max(h, num_peaks=num_peaks) #取出峰值
centers.extend(peaks)
accums.extend(h[peaks[:, 0], peaks[:, 1]])
radii.extend([radius] * num_peaks) #画出最接近的5个圆
image = color.gray2rgb(image)
for idx in np.argsort(accums)[::-1][:5]:
center_x, center_y = centers[idx]
radius = radii[idx]
cx, cy =draw.circle_perimeter(center_y, center_x, radius)
image[cy, cx] = (255,0,0) ax1.imshow(image)
ax1.set_title('detected image')
椭圆变换是类似的,使用函数为:
skimage.transform.hough_ellipse(img,accuracy, threshold, min_size, max_size)
输入参数:
img: 待检测图像。
accuracy: 使用在累加器上的短轴二进制尺寸,是一个double型的值,默认为1
thresh: 累加器阈值,默认为4
min_size: 长轴最小长度,默认为4
max_size: 短轴最大长度,默认为None,表示图片最短边的一半。
返回一个 [(accumulator, y0, x0, a, b, orientation)] 数组,accumulator表示累加器,(y0,x0)表示椭圆中心点,(a,b)分别表示长短轴,orientation表示椭圆方向
例:检测出咖啡图片中的椭圆杯口
import matplotlib.pyplot as plt
from skimage import data,draw,color,transform,feature #加载图片,转换成灰度图并检测边缘
image_rgb = data.coffee()[0:220, 160:420] #裁剪原图像,不然速度非常慢
image_gray = color.rgb2gray(image_rgb)
edges = feature.canny(image_gray, sigma=2.0, low_threshold=0.55, high_threshold=0.8) #执行椭圆变换
result =transform.hough_ellipse(edges, accuracy=20, threshold=250,min_size=100, max_size=120)
result.sort(order='accumulator') #根据累加器排序 #估计椭圆参数
best = list(result[-1]) #排完序后取最后一个
yc, xc, a, b = [int(round(x)) for x in best[1:5]]
orientation = best[5] #在原图上画出椭圆
cy, cx =draw.ellipse_perimeter(yc, xc, a, b, orientation)
image_rgb[cy, cx] = (0, 0, 255) #在原图中用蓝色表示检测出的椭圆 #分别用白色表示canny边缘,用红色表示检测出的椭圆,进行对比
edges = color.gray2rgb(edges)
edges[cy, cx] = (250, 0, 0) fig2, (ax1, ax2) = plt.subplots(ncols=2, nrows=1, figsize=(8, 4)) ax1.set_title('Original picture')
ax1.imshow(image_rgb) ax2.set_title('Edge (white) and result (red)')
ax2.imshow(edges) plt.show()
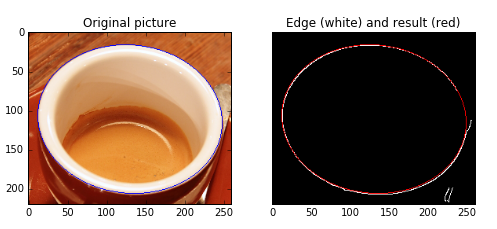
霍夫椭圆变换速度非常慢,应避免图像太大。
python数字图像处理(16):霍夫圆和椭圆变换的更多相关文章
- 「转」python数字图像处理(18):高级形态学处理
python数字图像处理(18):高级形态学处理 形态学处理,除了最基本的膨胀.腐蚀.开/闭运算.黑/白帽处理外,还有一些更高级的运用,如凸包,连通区域标记,删除小块区域等. 1.凸包 凸包是指一 ...
- python数字图像处理(17):边缘与轮廓
在前面的python数字图像处理(10):图像简单滤波 中,我们已经讲解了很多算子用来检测边缘,其中用得最多的canny算子边缘检测. 本篇我们讲解一些其它方法来检测轮廓. 1.查找轮廓(find_c ...
- python数字图像处理(15):霍夫线变换
在图片处理中,霍夫变换主要是用来检测图片中的几何形状,包括直线.圆.椭圆等. 在skimage中,霍夫变换是放在tranform模块内,本篇主要讲解霍夫线变换. 对于平面中的一条直线,在笛卡尔坐标系中 ...
- python数字图像处理(1):环境安装与配置
一提到数字图像处理编程,可能大多数人就会想到matlab,但matlab也有自身的缺点: 1.不开源,价格贵 2.软件容量大.一般3G以上,高版本甚至达5G以上. 3.只能做研究,不易转化成软件. 因 ...
- 初始----python数字图像处理--:环境安装与配置
一提到数字图像处理编程,可能大多数人就会想到matlab,但matlab也有自身的缺点: 1.不开源,价格贵 2.软件容量大.一般3G以上,高版本甚至达5G以上. 3.只能做研究,不易转化成软件. 因 ...
- 霍夫圆检测 opencv
进行霍夫圆变换中有一个API:HoughCircles(). 第五个参数为double类型的minDist(),为霍夫变换检测到的圆的圆心之间的最小距离,即让算法能明显区分的两个不同圆之间的最小距离. ...
- python数字图像处理(二)关键镜头检测
镜头边界检测技术简述 介绍 作为视频最基本的单元帧(Frame),它的本质其实就是图片,一系列帧通过某种顺序组成在一起就构成了视频.镜头边界是视频相邻两帧出现了某种意义的变化,即镜头边界反映了视频内容 ...
- python数字图像处理(19):骨架提取与分水岭算法
骨架提取与分水岭算法也属于形态学处理范畴,都放在morphology子模块内. 1.骨架提取 骨架提取,也叫二值图像细化.这种算法能将一个连通区域细化成一个像素的宽度,用于特征提取和目标拓扑表示. m ...
- python数字图像处理(三)边缘检测常用算子
在该文将介绍基本的几种应用于边缘检测的滤波器,首先我们读入saber用来做为示例的图像 #读入图像代码,在此之前应当引入必要的opencv matplotlib numpy saber = cv2.i ...
随机推荐
- android Gui系统之WMS(1)----window flags & view flags
SurfaceFlinger 前面说的,就是一个surface的合成.SurfaceFlinger就是一个默默的记录着,它不会对surface的内容有什么改动. WMS(WindowsManagerS ...
- 多元线性回归 ——模型、估计、检验与预测
一.模型假设 传统多元线性回归模型 最重要的假设的原理为: 1. 自变量和因变量之间存在多元线性关系,因变量y能够被x1,x2-.x{k}完全地线性解释:2.不能被解释的部分则为纯粹的无法观测到的误差 ...
- 大数据挖掘: FPGrowth初识--进行商品关联规则挖掘
@(hadoop)[Spark, MLlib, 数据挖掘, 关联规则, 算法] [TOC] 〇.简介 经典的关联规则挖掘算法包括Apriori算法和FP-growth算法.Apriori算法多次扫描交 ...
- shutdown
关机命令 $sudo shutdowm [-hrc] -h定时关机,以分钟为单位的计时,时间或now -h now立即关机 -h +2020分钟后关机 -h 12:0012点关机 -r now立即重启 ...
- linux shell 之 crontab(定时任务)详解
1.定义: crontab命令常见于Unix和类Unix的操作系统之中,用于设置周期性被执行的指令.该命令从标准输入设备读取指令,并将其存放于“crontab”文件中,以供之后读取和执行.该词来源于希 ...
- 报表引擎API开发入门—带参程序数据集
我们今天又来讲讲报表开发的事,上周开的这个系列入门文章也三四天了,浏览量不佳小编甚是悲伤啊,希望大家多多支持我! 一.问题描述 在实际应用中,可能需要根据表名动态地改变数据源,比如在程序数据集中,通过 ...
- AWS国际版的Route 53和CloudFront
注册AWS国际版账号后,却发现Route 53和CloudFront功能是无法使用的.于是提交了一个Service Request,得到的答复是这两个功能需要验证后才能激活. 在控制台中点击进入Rou ...
- 学习shell中遇到的一些基础问题总结
今天入门Shell脚本编程:今天的目标是完成冒泡排序,遇到了很多问题,总结了一下: 我从c转到shell遇到了这样的一些情况: 1:首先这几个符号非常重要 $变量:把变量的值拿出来使用(所以赋值语句应 ...
- DPM检测模型 训练自己的数据集 读取接口修改
(转载请注明作者和出处 楼燚(yì)航的blog :http://www.cnblogs.com/louyihang-loves-baiyan/ 未经允许请勿用于商业用途) 本文主要是针对上一篇基于D ...
- 嵌入式Linux驱动学习之路(六)u-boot启动内核
内核启动是需要必要的启动参数.不能开机自动完全从0开始启动,需要uboot帮助内核实现重定位并提供参数. 首先,uboo会从Kernel分区中读取bootcmd环境变量,根据环境变量可自动启动. 分区 ...