RVO算法
http://blog.sina.com.cn/s/blog_6ad33d350102xqal.html
简介
在介绍VO,RVO之前,需要先介绍路径规划。
对Agent进行路径规划,实际上要完成的任务就是让Agent从点A无碰撞地移动到点B。而路径规划的过程是层次化的,其基本框架大致如下:
- High level:
dijkstra等算法。
- Low level:
VO, RVO, ORCA等底层避障算法。
- High level:
通过dijkstra算法,得到路径为: 教学楼→饭堂→体育馆→图书馆→宿舍楼。
- Low level:
通过底层避障算法如VO,RVO,ORCA等底层避障算法,保证我们走的每一段路(e.g. 教学楼→饭堂),都不会跟别的同学发生碰撞。
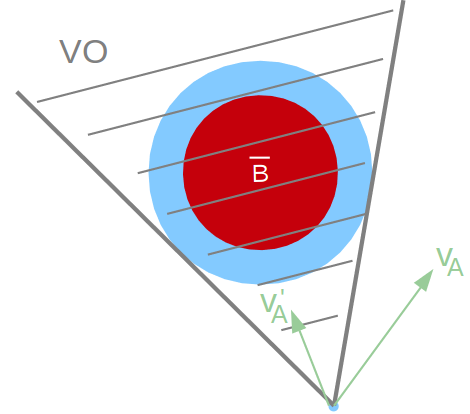
- VO是指速度方向与B¯B¯相交的部分,即会发生碰撞的部分(图中灰色斜线部分)。
- VO是抱着宁杀错,不放过的思想,把所有未来有可能会发生碰撞的速度都放弃了。
- 实际上假如仅要求一定时间内不发生碰撞的话,有更多的速度可供选择,比如说上图中的(v′AvA′)。
- 物体A(B):以pApA为圆心,rArA为半径的点集AA
- 假设B静止:A相对于B的速度,即相对速度vA−vBvA−vB
- 把A化作质点:求集合BB与集合−A−A的Minkowski
sum,即闵氏和,B⊕−AB⊕−A,其中
- A⊕B={a+b | a∈A,b∈B}A⊕B={a+b | a∈A,b∈B}
- −A={−a | a∈A}−A={−a | a∈A}
- 首先给出射线的定义,用λ(p,v)λ(p,v)表示以点pp为顶点,方向为vv的射线。
- λ(p,v)={p+tv|t≥0}λ(p,v)={p+tv|t≥0}
- 接下来就是VO的定义了,用VOAB(vB)VOBA(vB)表示速度为vBvB的BB对AA的VO
- VOAB(vB)={vA|λ(pA,vA−vB)∩B⊕−A≠∅}VOBA(vB)={vA|λ(pA,vA−vB)∩B⊕−A≠∅}
- 抖动现象:如下左图所示,即AA会在vAvA与v′AvA′之间来回切换
- RVO的效果:如下右图所示,保持vAvA,不会抖动
![]()
- Symmetry:vAvA的AA会撞上vBvB的BB,则vBvB的BB也会撞上vAvA的AA
- vA∈VOAB(vB)⇔vB∈VOBA(vA)vA∈VOBA(vB)⇔vB∈VOAB(vA)
- Translation Invariance:vAvA的AA会撞上vBvB的BB,则vA+uvA+u的AA会撞上vB+uvB+u的BB
- vA∈VOAB(vB)⇔vA+u∈VOAB(vB+u)vA∈VOBA(vB)⇔vA+u∈VOBA(vB+u)
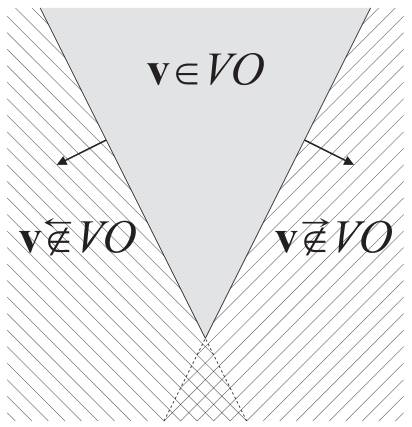
- Convexity:在VOAB(vB)VOBA(vB)的左(右)侧的两个速度之间的任意速度,也在VOAB(vB)VOBA(vB)的左(右)侧。VO左(右)侧如下图所示:
- vA∉→VOAB(vB)∧v′A∉→VOAB(vB)⇒(1−α)vA+αv′A∉→VOAB(vB), for 0≤α≤1vA∉→VOBA(vB)∧vA′∉→VOBA(vB)⇒(1−α)vA+αvA′∉→VOBA(vB), for 0≤α≤1
- 假设初始状态为会发生碰撞:vA∈VOAB(vB), vB∈VOBA(vA)vA∈VOBA(vB), vB∈VOAB(vA)
- 由于在对方的VO内,所以各自选择新的速度以防止碰撞:v′A∉VOAB(vB), v′B∉VOBA(vA)vA′∉VOBA(vB), vB′∉VOAB(vA)
- 由前面VO的Symmetry性质可知:此时,原来的速度不在当前速度的VO内:vB∉VOBA(v′A), vA∉VOAB(v′B)vB∉VOAB(vA′), vA∉VOBA(vB′)
- 假设我们更加prefer原来的速度,则又会回到原来的vAvA与vBvB
- 于是在1→4之间循环,即发生抖动
- 缩小VO的大小,新的”VO”就叫做RVO
- p.s. 我个人对Reciprocal的理解是:相对于VO完全把对方当做木头,RVO假设对方在避障中也会承担一定责任,所以不用完全靠自己改变速度来走出VO,有种互相合作避障的感觉。
- 或者换一个角度理解,不再直接选择VO外的速度v′AvA′作为新的速度,而是average当前速度vAvA与VO外的速度v′AvA′
- 速度为vBvB的BB对速度为vAvA的AA产生的RVO为:
- 图示理解如下:
![]()
- 释意:
- 2v′A−vA2vA′−vA:vAvA相对于v′AvA′的对称点。
- 所以公式的含义是:对称点在原VO中,则中点在RVO中。
- 所以RVO的构成是:vAvA与原VO中的点的中点。
- 双方选择同侧避障时,不会发生碰撞。
- 双方一定会选择同侧避障。
- 不会有抖动现象:原来会撞的在选择新速度后依然会撞。
- 用数学语言来描述问题:化作质点的描述、抖动的描述。
- 从实际应用中发现问题:抖动问题的发现。
- 特殊到一般的推广:论文后面还将RVO推广到一般情况,很漂亮的推广。
很容易可以跟我们的日常生活进行类比,比如说我们要从学校的教学楼走到宿舍楼,那么以上框架对应的就是:
VO和RVO就是经典的底层避障算法。其中VO是最经典的,RVO则在VO的基础上进行了一些改进,解决了VO抖动的问题。
VO(Velocity Obstacle)
一句话总结VO的思路:只要在未来有可能会发生碰撞的速度,都排除在外。
为方便描述,以下都假设是在平面内,圆形物体之间的避障。
VO的直观理解
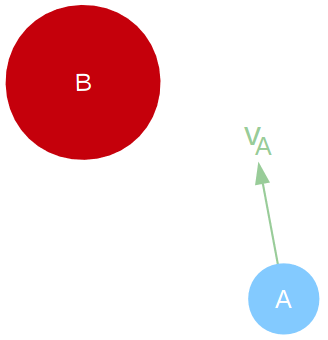
Q: 假设B静止,那么A取什么速度能够保证一定不会跟B发生碰撞呢?
A: 一种很粗暴的方法,就是把A化作质点,选择跟B¯B¯(扩展后的B)不相交的速度方向。以后只要在每个周期里面,都选择不在VO的速度,就能够保证不会碰撞。
以上就是VO的直观理解,需要注意的是:
VO的图示理解
有了直观理解之后就可以用更加严谨一点的数学语言图示VO了。
首先将直观理解中口语化的表达转换成对应的数学语言表示。
于是就有了下图的左半部分(浅色三角形):
而为了直接求vAvA绝对速度的VO而不是vA−vBvA−vB相对速度的VO,将相对速度下的VO延vBvB方向平移,就有了图中右半部分(深色三角形)。
VO的数学定义
理解了图示,数学定义就很好理解了。
RVO(Reciprocal Velocity Obstacle)
VO给出了很漂亮的避障条件,所以后面很多底层的避障算法都是基于VO的,而RVO就是其中之一。
RVO主要解决了VO的抖动问题
证明VO抖动现象存在
首先论文给出了VO的三条性质
![]()
{kind=link}
接下来是抖动现象存在的证明
RVO的Insight
首先回想一下为什么会发生抖动:
双方为了避障,都偏移了当前速度太多,导致更新速度后,原来速度不再会发生碰撞。
那么我们有没有办法减少对当前速度的偏移,同时又能保证避障呢,RVO的回答是肯定的:
RVO的定义与图示
RVOAB(vB,vA)={v′A | 2v′A−vA∈VOAB(vB)}RVOBA(vB,vA)={vA′ | 2vA′−vA∈VOBA(vB)}
RVO不会发生碰撞且没有抖动现象的证明
这一部分不赘述了,论文中写得很详尽,只说一下证明的思路:
收获
References
RVO算法的更多相关文章
- RTS寻路相关资料收集
http://www.cocoachina.com/game/20150824/13174.html RVO算法 RVO避开agent
- 如何制作RTS游戏的寻路系统?
Q1:我们在做一个RTS游戏,开始用的是Unity自带的NavMesh的寻路,但发现这个并不适合RTS多人寻路,因为总会出现阻挡和闪跳的问题.看Asset Store上的A* path插件评论说在碰撞 ...
- GameUnity 2.0 文档(五) 人工智能之---------------Flocking算法 (聚集,分散,列队 )
AI是游戏的灵魂,是人物的智商,是让玩家觉得游戏是否幼稚的重要判断功能,下面我将介绍国外流行,国内不行的,ai算法. 主要介绍 Flocking 和 Reciprocal Velocity Obs ...
- B树——算法导论(25)
B树 1. 简介 在之前我们学习了红黑树,今天再学习一种树--B树.它与红黑树有许多类似的地方,比如都是平衡搜索树,但它们在功能和结构上却有较大的差别. 从功能上看,B树是为磁盘或其他存储设备设计的, ...
- 分布式系列文章——Paxos算法原理与推导
Paxos算法在分布式领域具有非常重要的地位.但是Paxos算法有两个比较明显的缺点:1.难以理解 2.工程实现更难. 网上有很多讲解Paxos算法的文章,但是质量参差不齐.看了很多关于Paxos的资 ...
- 【Machine Learning】KNN算法虹膜图片识别
K-近邻算法虹膜图片识别实战 作者:白宁超 2017年1月3日18:26:33 摘要:随着机器学习和深度学习的热潮,各种图书层出不穷.然而多数是基础理论知识介绍,缺乏实现的深入理解.本系列文章是作者结 ...
- 红黑树——算法导论(15)
1. 什么是红黑树 (1) 简介 上一篇我们介绍了基本动态集合操作时间复杂度均为O(h)的二叉搜索树.但遗憾的是,只有当二叉搜索树高度较低时,这些集合操作才会较快:即当树的高度较高(甚至一种极 ...
- 散列表(hash table)——算法导论(13)
1. 引言 许多应用都需要动态集合结构,它至少需要支持Insert,search和delete字典操作.散列表(hash table)是实现字典操作的一种有效的数据结构. 2. 直接寻址表 在介绍散列 ...
- 虚拟dom与diff算法 分析
好文集合: 深入浅出React(四):虚拟DOM Diff算法解析 全面理解虚拟DOM,实现虚拟DOM
随机推荐
- Java for LeetCode 131 Palindrome Partitioning
Given a string s, partition s such that every substring of the partition is a palindrome. Return all ...
- LeetCode:二叉树剪枝【814】
LeetCode:二叉树剪枝[814] 题目描述 给定二叉树根结点 root ,此外树的每个结点的值要么是 0,要么是 1. 返回移除了所有不包含 1 的子树的原二叉树. ( 节点 X 的子树为 X ...
- 让我们再谈谈 iOS 安全
前言 安全方面的话题总是聊不完的.这不,国外一家有名的专门攻击别人的安全公司 Hacking Team 自己被 Hack 了,结果有 400 多 G 的攻击资料泄漏出来,包括一些 0-day 的漏洞. ...
- BZOJ 3990 [SDOI2015]排序
题解: 首先很容易看出各个操作是互不影响的,即对于一个合法的操作序列,我们可以任意交换两个操作的位置而不影响合法性. 因此我们可以忽略操作先后的影响,只考虑这个操作是否会出现在操作序列中. 如果用2n ...
- python的小知识点
python中的变量的名字必须由字母.数字.下划线组成,并且不可以以数字开头. 字典的内容是键-值对,键必须是不可变的,比如字符,整数,浮点数,元组,列表不可以,因为列表可变.集合的元素不重复.字典和 ...
- CSS+HTML+JQuery简单菜单
1. [代码]style <style type="text/css"> body,ul,li,a{ margin:0; paddin ...
- CSS3咖啡制作全过程动画
CSS3咖啡制作全过程动画是一款利用纯CSS3实现的咖啡制作全过程动画特效,从把咖啡豆导入杯子,到把咖啡煮好,整个动画还比较流畅. 源码:http://www.huiyi8.com/sc/8788.h ...
- ZOJ 3329 One Person Game:期望dp【关于一个点成环——分离系数】
题目链接:http://acm.zju.edu.cn/onlinejudge/showProblem.do?problemCode=3329 题意: 给你面数分别为k1,k2,k3的三个骰子. 给定a ...
- jsp参数传递
jsp参数传递 jsp中四种传递参数的方法 1.form表单 2.request.setAttribute();和request.getAttribute(); 3.超链接:<a herf=&q ...
- 总结近期CNN模型的发展(一)---- ResNet [1, 2] Wide ResNet [3] ResNeXt [4] DenseNet [5] DPNet [9] NASNet [10] SENet [11] Capsules [12]
总结近期CNN模型的发展(一) from:https://zhuanlan.zhihu.com/p/30746099 余俊 计算机视觉及深度学习 1.前言 好久没有更新专栏了,最近因为项目的原因接 ...