(转) How a Kalman filter works, in pictures
How a Kalman filter works, in pictures
I have to tell you about the Kalman filter, because what it does is pretty damn amazing.
Surprisingly few software engineers and scientists seem to know about it, and that makes me sad because it is such a general and powerful tool for combining information in the presence of uncertainty. At times its ability to extract accurate information seems almost magical— and if it sounds like I’m talking this up too much, then take a look at this previously posted video where I demonstrate a Kalman filter figuring out the orientation of a free-floating body by looking at its velocity. Totally neat!
What is it?
You can use a Kalman filter in any place where you have uncertain information about some dynamic system, and you can make an educated guess about what the system is going to do next. Even if messy reality comes along and interferes with the clean motion you guessed about, the Kalman filter will often do a very good job of figuring out what actually happened. And it can take advantage of correlations between crazy phenomena that you maybe wouldn’t have thought to exploit!
Kalman filters are ideal for systems which are continuously changing. They have the advantage that they are light on memory (they don’t need to keep any history other than the previous state), and they are very fast, making them well suited for real time problems and embedded systems.
The math for implementing the Kalman filter appears pretty scary and opaque in most places you find on Google. That’s a bad state of affairs, because the Kalman filter is actually super simple and easy to understand if you look at it in the right way. Thus it makes a great article topic, and I will attempt to illuminate it with lots of clear, pretty pictures and colors. The prerequisites are simple; all you need is a basic understanding of probability and matrices.
I’ll start with a loose example of the kind of thing a Kalman filter can solve, but if you want to get right to the shiny pictures and math, feel free to jump ahead.
What can we do with a Kalman filter?
Let’s make a toy example: You’ve built a little robot that can wander around in the woods, and the robot needs to know exactly where it is so that it can navigate.
We’ll say our robot has a state xk→, which is just a position and a velocity:
xk→=(p⃗ ,v⃗ )
Note that the state is just a list of numbers about the underlying configuration of your system; it could be anything. In our example it’s position and velocity, but it could be data about the amount of fluid in a tank, the temperature of a car engine, the position of a user’s finger on a touchpad, or any number of things you need to keep track of.
Our robot also has a GPS sensor, which is accurate to about 10 meters, which is good, but it needs to know its location more precisely than 10 meters. There are lots of gullies and cliffs in these woods, and if the robot is wrong by more than a few feet, it could fall off a cliff. So GPS by itself is not good enough.

We might also know something about how the robot moves: It knows the commands sent to the wheel motors, and its knows that if it’s headed in one direction and nothing interferes, at the next instant it will likely be further along that same direction. But of course it doesn’t know everything about its motion: It might be buffeted by the wind, the wheels might slip a little bit, or roll over bumpy terrain; so the amount the wheels have turned might not exactly represent how far the robot has actually traveled, and the prediction won’t be perfect.
The GPS sensor tells us something about the state, but only indirectly, and with some uncertainty or inaccuracy. Our prediction tells us something about how the robot is moving, but only indirectly, and with some uncertainty or inaccuracy.
But if we use all the information available to us, can we get a better answer than either estimate would give us by itself? Of course the answer is yes, and that’s what a Kalman filter is for.
How a Kalman filter sees your problem
Let’s look at the landscape we’re trying to interpret. We’ll continue with a simple state having only position and velocity.
We don’t know what the actual position and velocity are; there are a whole range of possible combinations of position and velocity that might be true, but some of them are more likely than others:
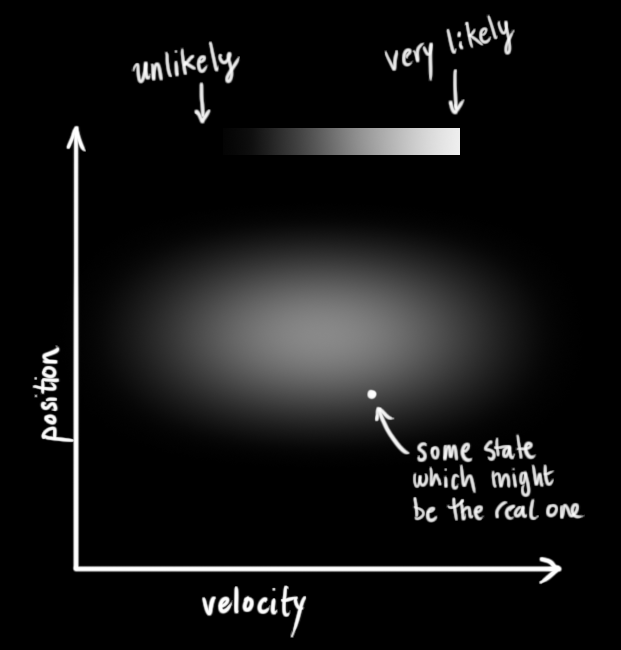
The Kalman filter assumes that both variables (postion and velocity, in our case) are random and Gaussian distributed. Each variable has a mean value μ, which is the center of the random distribution (and its most likely state), and a variance σ2, which is the uncertainty:
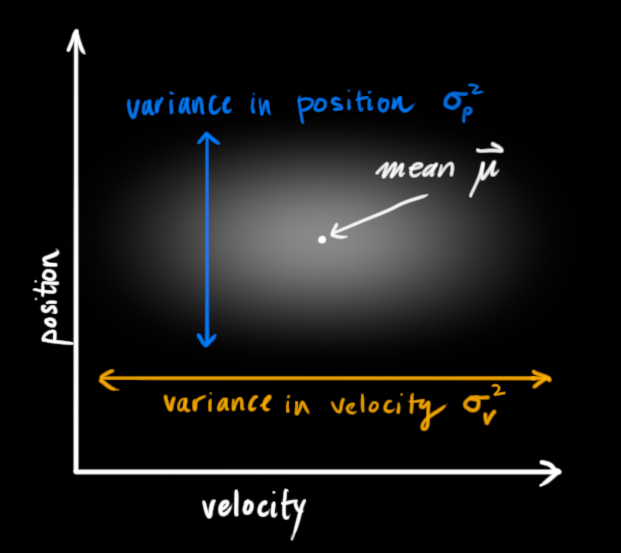
In the above picture, position and velocity are uncorrelated, which means that the state of one variable tells you nothing about what the other might be.
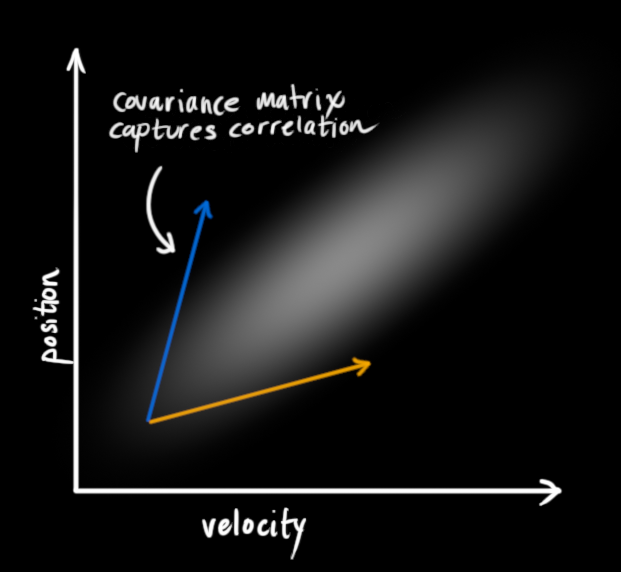
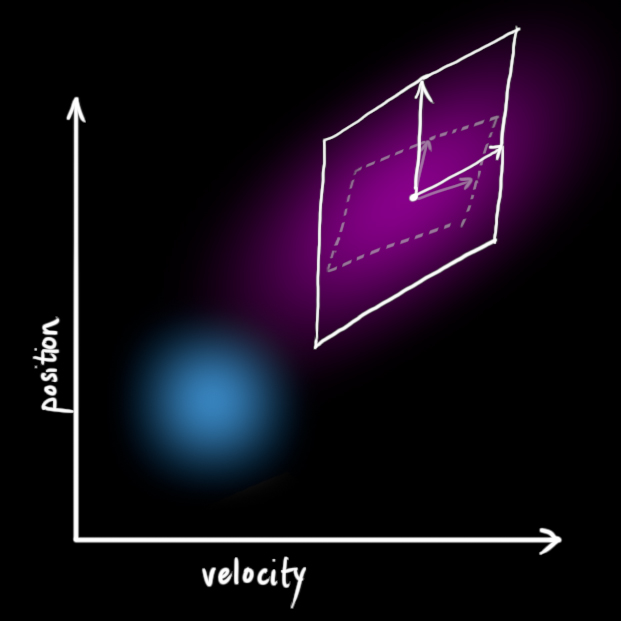
The example below shows something more interesting: Position and velocity are correlated. The likelihood of observing a particular position depends on what velocity you have:
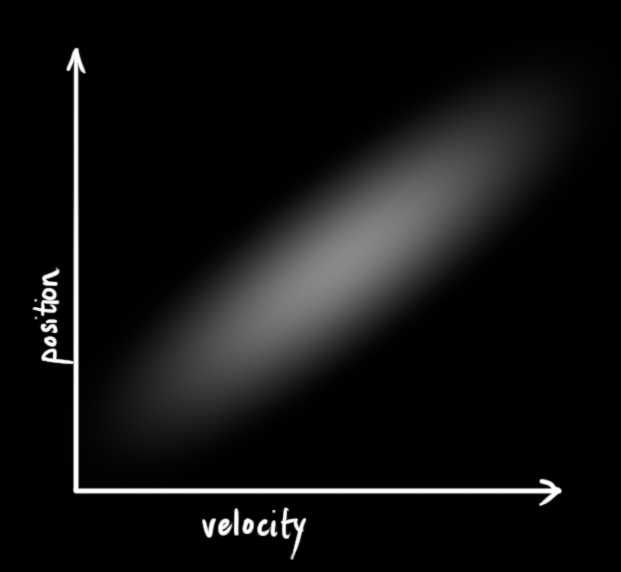 This kind of situation might arise if, for example, we are estimating a new position based on an old one. If our velocity was high, we probably moved farther, so our position will be more distant. If we’re moving slowly, we didn’t get as far.
This kind of situation might arise if, for example, we are estimating a new position based on an old one. If our velocity was high, we probably moved farther, so our position will be more distant. If we’re moving slowly, we didn’t get as far.
This kind of relationship is really important to keep track of, because it gives us more information: One measurement tells us something about what the others could be. And that’s the goal of the Kalman filter, we want to squeeze as much information from our uncertain measurements as we possibly can!
This correlation is captured by something called a covariance matrix. In short, each element of the matrix Σij is the degree of correlation between the ith state variable and the jth state variable. (You might be able to guess that the covariance matrix is symmetric, which means that it doesn’t matter if you swap i and j). Covariance matrices are often labelled “Σ”, so we call their elements “Σij”.
Describing the problem with matrices
We’re modeling our knowledge about the state as a Gaussian blob, so we need two pieces of information at time k: We’ll call our best estimate x^k (the mean, elsewhere named μ ), and its covariance matrix Pk.
(Of course we are using only position and velocity here, but it’s useful to remember that the state can contain any number of variables, and represent anything you want).
Next, we need some way to look at the current state (at time k-1) and predict the next state at time k. Remember, we don’t know which state is the “real” one, but our prediction function doesn’t care. It just works on all of them, and gives us a new distribution:
 We can represent this prediction step with a matrix, Fk:
We can represent this prediction step with a matrix, Fk:
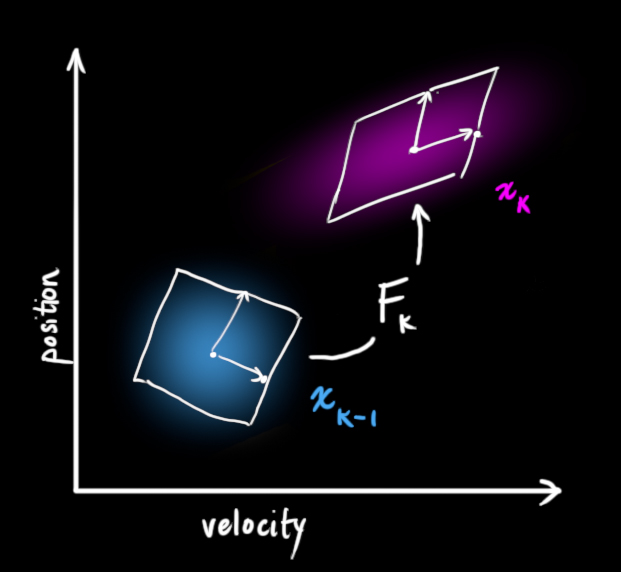 It takes every point in our original estimate and moves it to a new predicted location, which is where the system would move if that original estimate was the right one.
It takes every point in our original estimate and moves it to a new predicted location, which is where the system would move if that original estimate was the right one.
Let’s apply this. How would we use a matrix to predict the position and velocity at the next moment in the future? We’ll use a really basic kinematic formula:
In other words:
We now have a prediction matrix which gives us our next state, but we still don’t know how to update the covariance matrix.
This is where we need another formula. If we multiply every point in a distribution by a matrix A, then what happens to its covariance matrix Σ?
Well, it’s easy. I’ll just give you the identity:
So combining (4) with equation (3):
External influence
We haven’t captured everything, though. There might be some changes that aren’t related to the state itself— the outside world could be affecting the system.
For example, if the state models the motion of a train, the train operator might push on the throttle, causing the train to accelerate. Similarly, in our robot example, the navigation software might issue a command to turn the wheels or stop. If we know this additional information about what’s going on in the world, we could stuff it into a vector called uk→, do something with it, and add it to our prediction as a correction.
Let’s say we know the expected acceleration a due to the throttle setting or control commands. From basic kinematics we get:
In matrix form:
Bk is called the control matrix and uk→ the control vector. (For very simple systems with no external influence, you could omit these).
Let’s add one more detail. What happens if our prediction is not a 100% accurate model of what’s actually going on?
External uncertainty
Everything is fine if the state evolves based on its own properties. Everything is still fine if the state evolves based on external forces, so long as we know what those external forces are.
But what about forces that we don’t know about? If we’re tracking a quadcopter, for example, it could be buffeted around by wind. If we’re tracking a wheeled robot, the wheels could slip, or bumps on the ground could slow it down. We can’t keep track of these things, and if any of this happens, our prediction could be off because we didn’t account for those extra forces.
We can model the uncertainty associated with the “world” (i.e. things we aren’t keeping track of) by adding some new uncertainty after every prediction step:
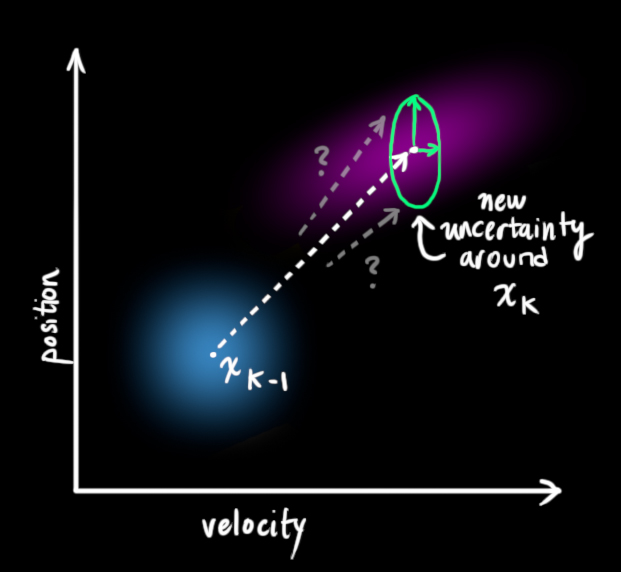
Every state in our original estimate could have moved to a range of states. Because we like Gaussian blobs so much, we’ll say that each point in x^k−1 is moved to somewhere inside a Gaussian blob with covariance Qk. Another way to say this is that we are treating the untracked influences as noise with covariance Qk.
 This produces a new Gaussian blob, with a different covariance (but the same mean):
This produces a new Gaussian blob, with a different covariance (but the same mean):
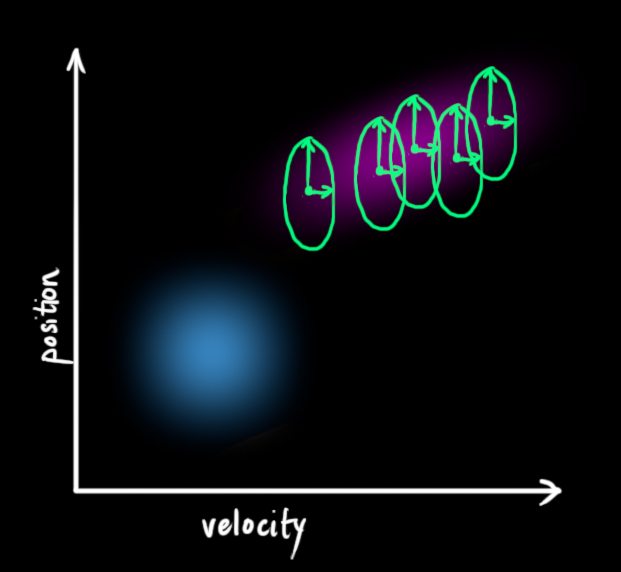
We get the expanded covariance by simply adding Qk, giving our complete expression for the prediction step:
In other words, the new best estimate is a prediction made from previous best estimate, plus a correction for known external influences.
And the new uncertainty is predicted from the old uncertainty, with some additional uncertainty from the environment.
All right, so that’s easy enough. We have a fuzzy estimate of where our system might be, given by x^k and Pk. What happens when we get some data from our sensors?
Refining the estimate with measurements
We might have several sensors which give us information about the state of our system. For the time being it doesn’t matter what they measure; perhaps one reads position and the other reads velocity. Each sensor tells us something indirect about the state— in other words, the sensors operate on a state and produce a set of readings.
 Notice that the units and scale of the reading might not be the same as the units and scale of the state we’re keeping track of. You might be able to guess where this is going: We’ll model the sensors with a matrix, Hk.
Notice that the units and scale of the reading might not be the same as the units and scale of the state we’re keeping track of. You might be able to guess where this is going: We’ll model the sensors with a matrix, Hk.
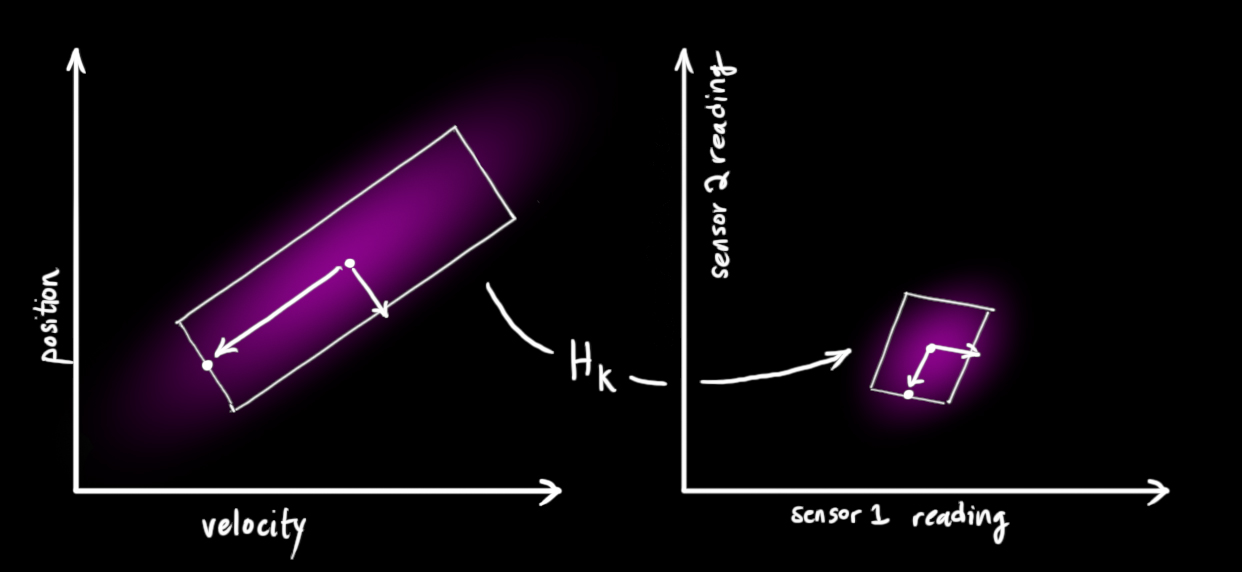
We can figure out the distribution of sensor readings we’d expect to see in the usual way:
One thing that Kalman filters are great for is dealing with sensor noise. In other words, our sensors are at least somewhat unreliable, and every state in our original estimate might result in a range of sensor readings.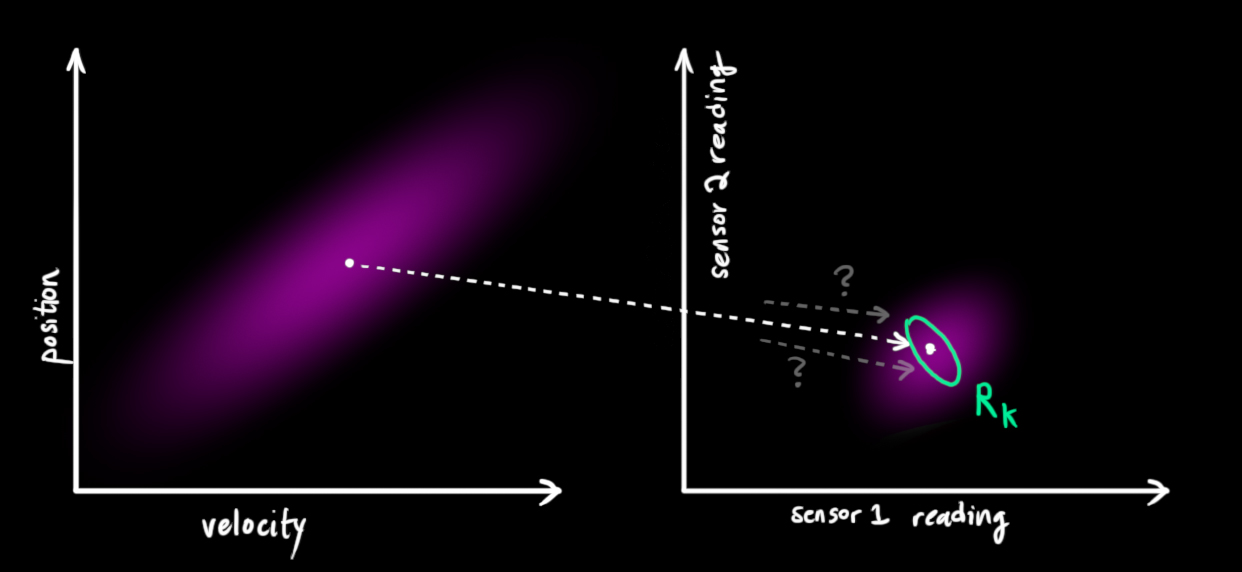
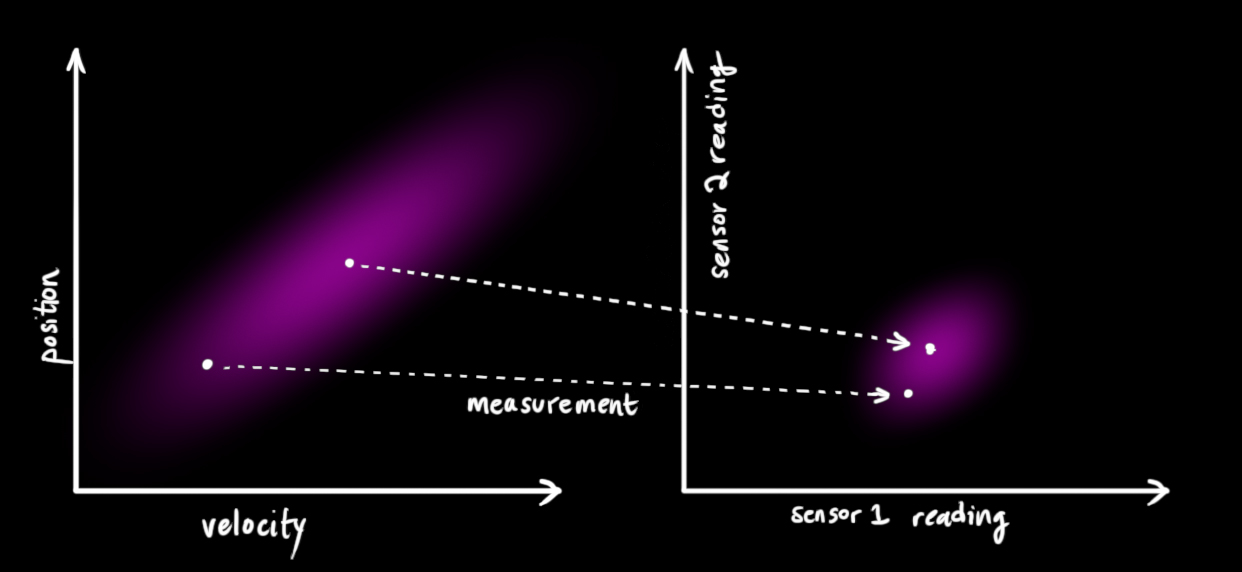
From each reading we observe, we might guess that our system was in a particular state. But because there is uncertainty, some states are more likely than others to have have produced the reading we saw: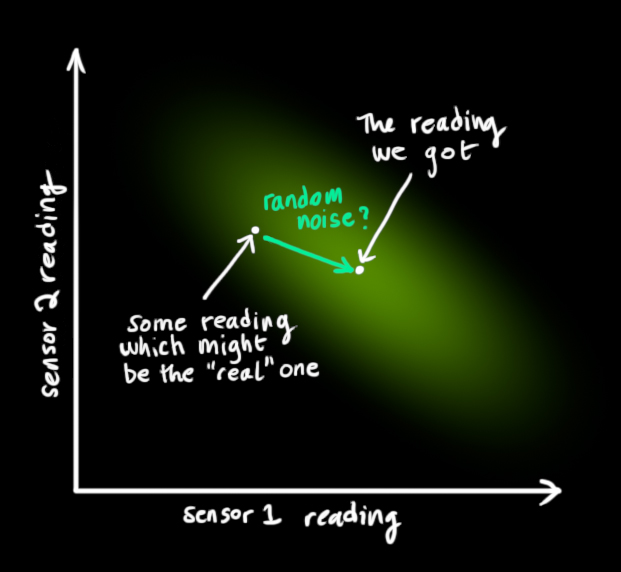
We’ll call the covariance of this uncertainty (i.e. of the sensor noise) Rk. The distribution has a mean equal to the reading we observed, which we’ll call zk→.
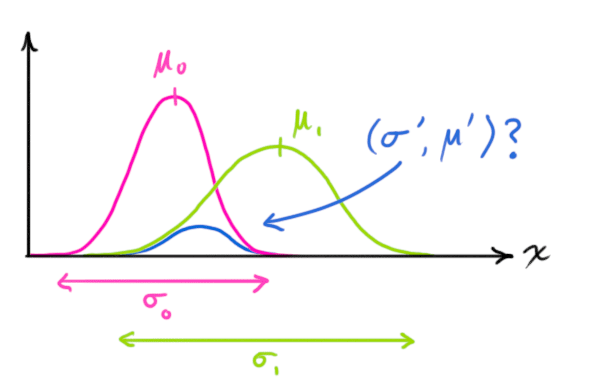
So now we have two Gaussian blobs: One surrounding the mean of our transformed prediction, and one surrounding the actual sensor reading we got.
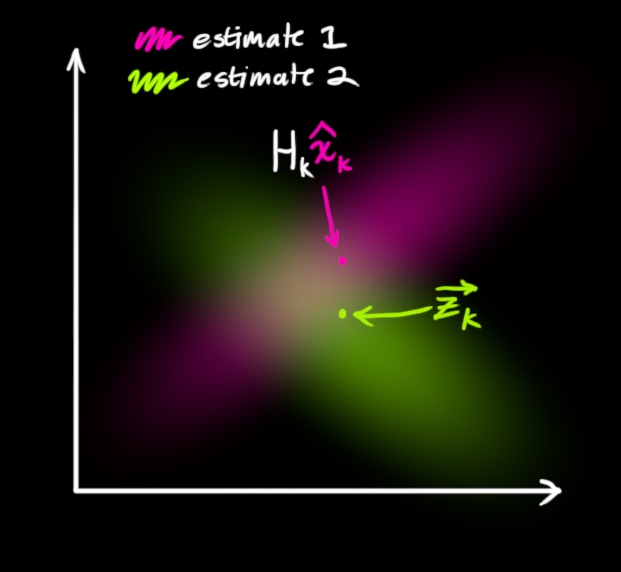
We must try to reconcile our guess about the readings we’d see based on the predicted state (pink) with a different guess based on our sensor readings (green) that we actually observed.
So what’s our new most likely state? For any possible reading (z1,z2), we have two associated probabilities: (1) The probability that our sensor reading zk→ is a (mis-)measurement of (z1,z2), and (2) the probability that our previous estimate thinks (z1,z2) is the reading we should see.
If we have two probabilities and we want to know the chance that both are true, we just multiply them together. So, we take the two Gaussian blobs and multiply them:
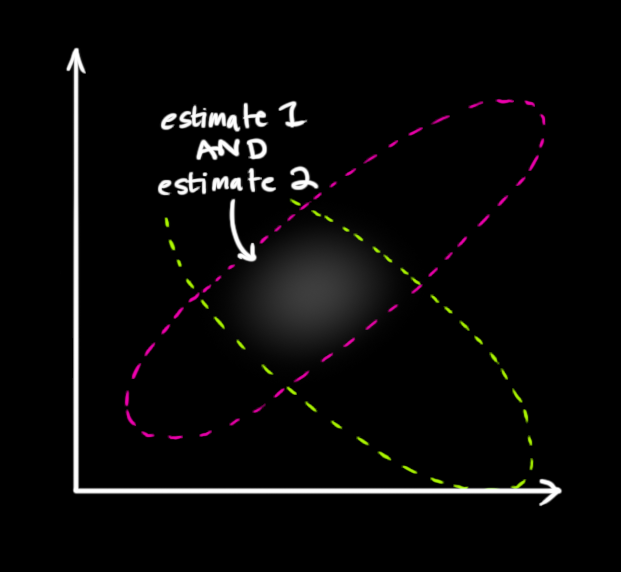
What we’re left with is the overlap, the region where both blobs are bright/likely. And it’s a lot more precise than either of our previous estimates. The mean of this distribution is the configuration for which both estimates are most likely, and is therefore the best guess of the true configuration given all the information we have.
Hmm. This looks like another Gaussian blob.
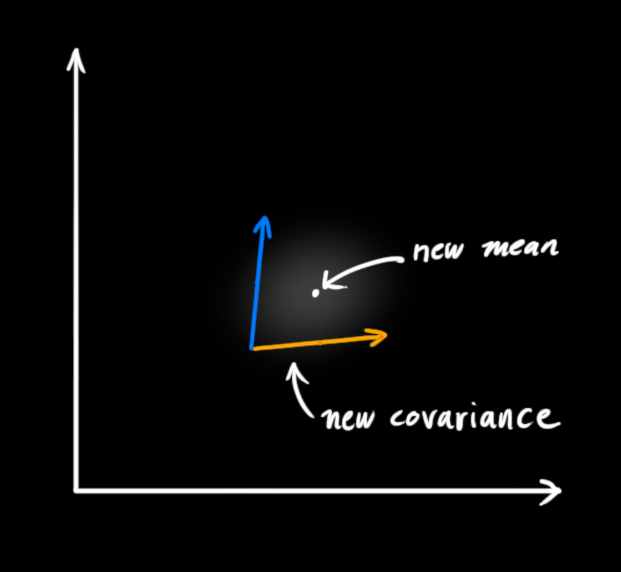
As it turns out, when you multiply two Gaussian blobs with separate means and covariance matrices, you get a new Gaussian blob with its own mean and covariance matrix! Maybe you can see where this is going: There’s got to be a formula to get those new parameters from the old ones!
Combining Gaussians
Let’s find that formula. It’s easiest to look at this first in one dimension. A 1D Gaussian bell curve with variance σ2 and mean μ is defined as:
We want to know what happens when you multiply two Gaussian curves together:
You can substitute equation (9) into equation (10) and do some algebra (being careful to renormalize, so that the total probability is 1) to obtain:
We can simplify by factoring out a little piece and calling it k:
Take note of how you can take your previous estimate and add something to make a new estimate. And look at how simple that formula is!
But what about a matrix version? Well, let’s just re-write equations (12) and (13) in matrix form. If Σ is the covariance matrix of a Gaussian blob, and μ⃗ its mean along each axis, then:
K is a matrix called the Kalman gain, and we’ll use it in just a moment.
Easy! We’re almost finished!
Putting it all together
We have two distributions: The predicted measurement with (μ0,Σ0)=(Hkx^k,HkPkHTk), and the observed measurement with (μ1,Σ1)=(zk→,Rk). We can just plug these into equation (15) to find their overlap:
And from (14), the Kalman gain is:
We can knock an Hk off the front of every term in (16) and (17) (note that one is hiding inside K ), and an HTk off the end of all terms in the equation for P′k.
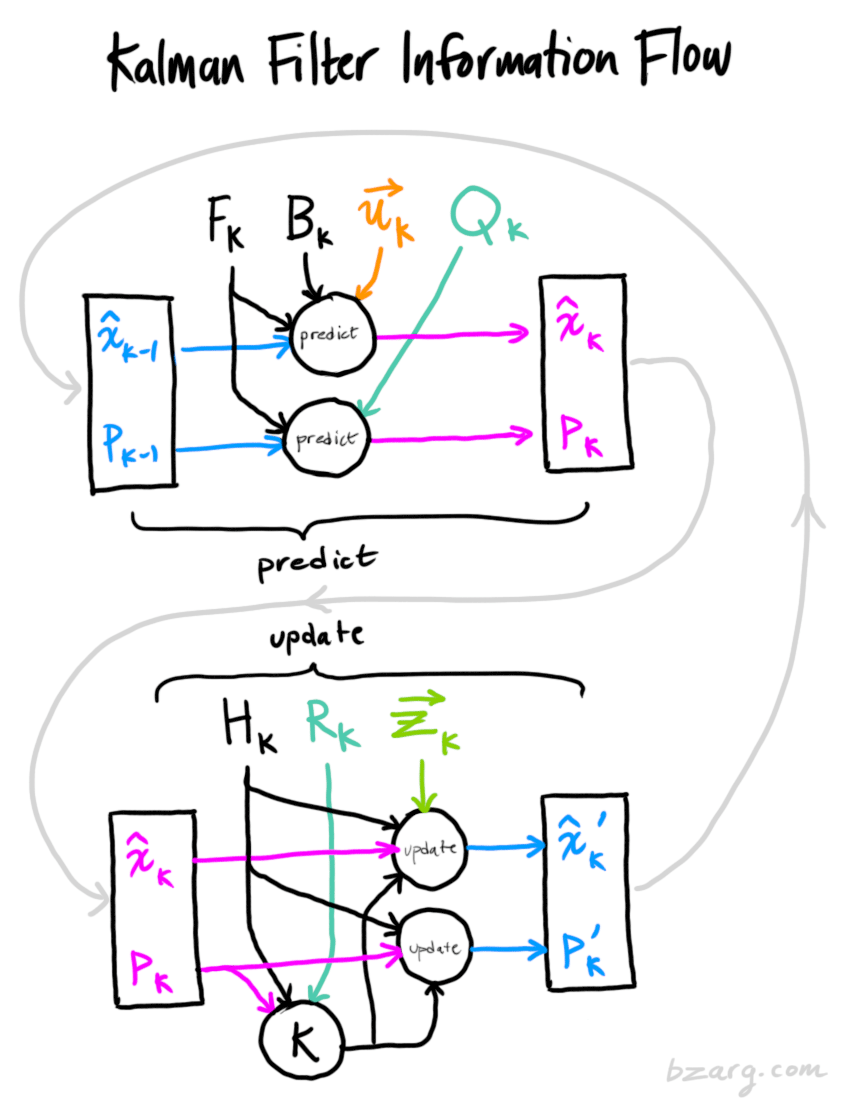
…giving us the complete equations for the update step.
And that’s it! x^′k is our new best estimate, and we can go on and feed it (along with P′k ) back into another round of predict or update as many times as we like.
Wrapping up
Of all the math above, all you need to implement are equations (7),(18), and (19). (Or if you forget those, you could re-derive everything from equations (4) and (15).)
This will allow you to model any linear system accurately. For nonlinear systems, we use the extended Kalman filter, which works by simply linearizing the predictions and measurements about their mean. (I may do a second write-up on the EKF in the future).
If I’ve done my job well, hopefully someone else out there will realize how cool these things are and come up with an unexpected new place to put them into action.
Some credit and referral should be given to this fine document, which uses a similar approach involving overlapping Gaussians. More in-depth derivations can be found there, for the curious.






This entry was posted in Mini-courses, Programming on August 11, 2015.
(转) How a Kalman filter works, in pictures的更多相关文章
- [OpenCV] Samples 14: kalman filter
Ref: http://blog.csdn.net/gdfsg/article/details/50904811 #include "opencv2/video/tracking.hpp&q ...
- 卡尔曼滤波器 Kalman Filter (转载)
在学习卡尔曼滤波器之前,首先看看为什么叫“卡尔曼”.跟其他著名的理论(例如傅立叶变换,泰勒级数等等)一样,卡尔曼也是一个人的名字,而跟他们不同的是,他是个现代人! 卡 尔曼全名Rudolf Emil ...
- 卡尔曼滤波—Simple Kalman Filter for 2D tracking with OpenCV
之前有关卡尔曼滤波的例子都比较简单,只能用于简单的理解卡尔曼滤波的基本步骤.现在让我们来看看卡尔曼滤波在实际中到底能做些什么吧.这里有一个使用卡尔曼滤波在窗口内跟踪鼠标移动的例子,原作者主页:http ...
- (二). 细说Kalman滤波:The Kalman Filter
本文为原创文章,转载请注明出处,http://www.cnblogs.com/ycwang16/p/5999034.html 前面介绍了Bayes滤波方法,我们接下来详细说说Kalman滤波器.虽然K ...
- 机器人学 —— 机器人感知(Kalman Filter)
对于机器人感知任务而言,经常需要预判物体的运动,保证机器人在物体与自身接触之前进行规避.比如无人机与障碍物的碰撞,足球机器人判断足球的位置.预判的前提是对当前状态进行准确的估计,比如足球的速度,障碍物 ...
- 卡尔曼滤波器【Kalman Filter For Dummies】
搬砖到此: A Quick Insight As I mentioned earlier, it's nearly impossible to grasp the full meaning o ...
- GMM+Kalman Filter+Blob 目标跟踪
转 http://www.cnblogs.com/YangQiaoblog/p/5462453.html ==========图片版================================== ...
- kalman filter卡尔曼滤波器- 数学推导和原理理解-----网上讲的比较好的kalman filter和整理、将预测值和观测值融和
= 参考/转自: 1 ---https://blog.csdn.net/u010720661/article/details/63253509 2----http://www.bzarg.com/p/ ...
- [Math]理解卡尔曼滤波器 (Understanding Kalman Filter) zz
1. 卡尔曼滤波器介绍 卡尔曼滤波器的介绍, 见 Wiki 这篇文章主要是翻译了 Understanding the Basis of the Kalman Filter Via a Simple a ...
随机推荐
- BestCoder Round #55 ($)
C 构造一个矩阵,然后采用矩阵快速幂 #include <iostream> #include <algorithm> #include <string.h> #i ...
- selenium-java web自动化测试工具抓取百度搜索结果实例
selenium-java web自动化测试工具抓取百度搜索结果实例 这种方式抓百度的搜索关键字结果非常容易抓长尾关键词,根据热门关键词去抓更多内容可以用抓google,百度的这种内容容易给屏蔽,用这 ...
- CSR8670的A2DP与AVRCP的应用笔记
1. A2DP1.1. 基本概念阅读A2DP SPEC V12的1.1章,可知: Advanced Audio Distribution Profile(A2DP)典型应用是立体声音乐播放器的音乐到耳 ...
- Installing Android Studio
To set up Android Studio on Windows: Launch the .exe file you just downloaded. Follow the setup wiza ...
- onclick 常用手册
1.如何去使用onclick来跳转到我们指定的页面/跳转到指定url ☆如果只是在本页显示的话,可以直接用location, 方法如下: ①onclick="javascript:windo ...
- div等比例缩放-------纯CSS实现自适应浏览器宽度的正方形
摘自:https://blog.csdn.net/u010513603/article/details/78200207 1.方案一:CSS3 vw 单位 CSS3 中新增了一组相对于可视区域百分比的 ...
- HTML(续)
1.有frame就无body,框架的noresize:设置框架大小不能改变.2.链接在框架中的应用target:有定为目标的功能.<a href = "链接源地址" targ ...
- Kattis之旅——Inverse Factorial
题目意思就是已知n的阶乘,求n. 当输入的阶乘小于10位数的时候,我们可以用long long将字符串转化成数字,直接计算. 而当输入的阶乘很大的时候,我们就可以利用位数去大概的估计n. //Asim ...
- pyqt5 界面切换
QStackedWidget 只需要关联好对应的信号和槽,调用setCurrentIndex函数,想切哪个界面就切到哪个界面
- close yield
close的方法主要是关闭子生成器,需要注意的有4点: 1.如果生成器close后,还继续next,会报错StopIteration [图片] 2.如果我捕获了异常,将GeneratorE ...