2018-2019-1 20189203 《Linux内核原理与分析》第七周作业
第一部分 实验
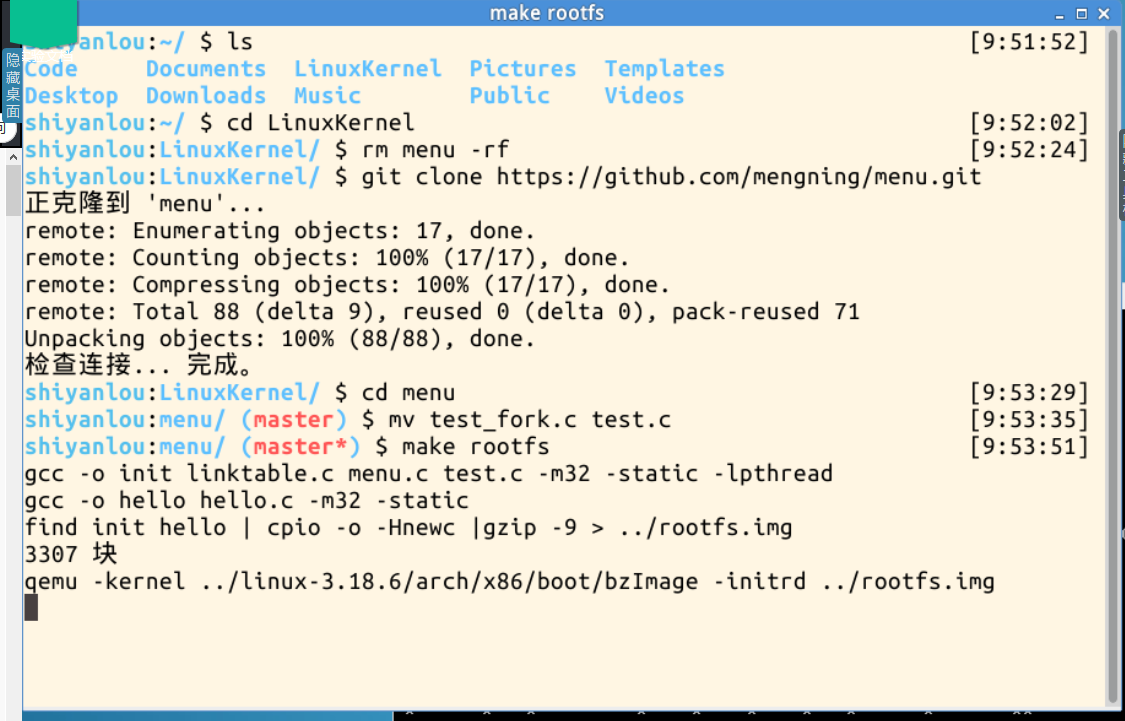
- 增加fork命令,运行MenuOS 如下:

- 设置断点:

- 跟踪调试过程:
停在的do_fork()的位置上

停在copy_process

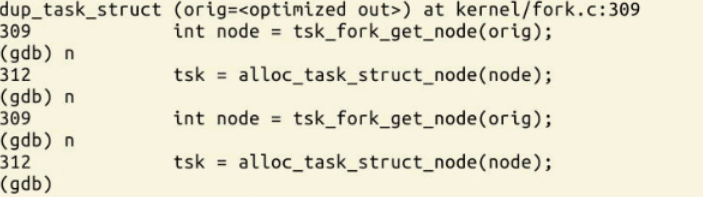
停在dup_task_struct
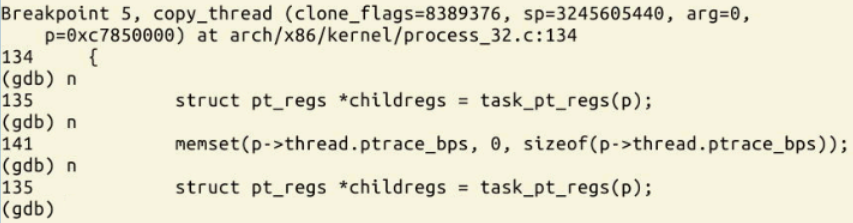
停在copy_thread
第二部分 代码分析
SYSCALL_DEFINE0(fork)
{
#ifdef CONFIG_MMU
return do_fork(SIGCHLD, 0, 0, NULL, NULL);
#else
return -EINVAL;
#endif
}
SYSCALL_DEFINE0(vfork)
{
return do_fork(CLONE_VFORK | CLONE_VM | SIGCHLD, 0,
0, NULL, NULL);
}
#ifdef __ARCH_WANT_SYS_CLONE
#ifdef CONFIG_CLONE_BACKWARDS
SYSCALL_DEFINE5(clone, unsigned long, clone_flags, unsigned long, newsp,
int __user *, parent_tidptr,
int, tls_val,
int __user *, child_tidptr)
#elif defined(CONFIG_CLONE_BACKWARDS2)
SYSCALL_DEFINE5(clone, unsigned long, newsp, unsigned long, clone_flags,
int __user *, parent_tidptr,
int __user *, child_tidptr,
int, tls_val)
#elif defined(CONFIG_CLONE_BACKWARDS3)
SYSCALL_DEFINE6(clone, unsigned long, clone_flags, unsigned long, newsp,
int, stack_size,
int __user *, parent_tidptr,
int __user *, child_tidptr,
int, tls_val)
#else
SYSCALL_DEFINE5(clone, unsigned long, clone_flags, unsigned long, newsp,
int __user *, parent_tidptr,
int __user *, child_tidptr,
int, tls_val)
#endif
{
return do_fork(clone_flags, newsp, 0, parent_tidptr, child_tidptr);
}
#endif
通过上面的代码可以看出 fork、vfork 和 clone 3个系统调用和kernel_thread内核函数都可以创建一个新进程,而且都是通过 do_fork 函数来创建进程的,只不过传递的参数不同。
进程创建的主要过程
首先了解一下do_fork () 的参数:
- clone_flags:子进程创建相关标志,通过此标志可以对父进程的资源进行有选择的复制。
- stack_start:子进程用户态堆栈的地址。
- regs:指向 pt_regs 结构体(当系统发生系统调用时,pt_regs 结构体保存寄存器中的值并按顺序压入内核栈)的指针。
- stack_size:用户态栈的大小,通常是不必要的,总被设置为0。
- parent_tidptr 和 child_tidptr:父进程、子进程用户态下 pid 地址。
下面是精简后的do_fork函数体关键代码:
struct task_struct *p; //创建进程描述符指针
int trace = 0;
long nr; //子进程pid
...
p = copy_process(clone_flags, stack_start, stack_size,
child_tidptr, NULL, trace); //创建子进程的描述符和执行时所需的其他数据结构
if (!IS_ERR(p)) //如果 copy_process 执行成功
struct completion vfork; //定义完成量(一个执行单元等待另一个执行单元完成某事)
struct pid *pid;
...
pid = get_task_pid(p, PIDTYPE_PID); //获得task结构体中的pid
nr = pid_vnr(pid); //根据pid结构体中获得进程pid
...
// 如果 clone_flags 包含 CLONE_VFORK 标志,就将完成量 vfork 赋值给进程描述符中的vfork_done字段,此处只是对完成量进行初始化
if (clone_flags & CLONE_VFORK) {
p->vfork_done = &vfork;
init_completion(&vfork);
get_task_struct(p);
}
wake_up_new_task(p); //将子进程添加到调度器的队列,使之有机会获得CPU
/* forking complete and child started to run, tell ptracer */
...
// 如果 clone_flags 包含 CLONE_VFORK 标志,就将父进程插入等待队列直至程直到子进程释调用exec函数或退出,此处是具体的阻塞
if (clone_flags & CLONE_VFORK) {
if (!wait_for_vfork_done(p, &vfork))
ptrace_event_pid(PTRACE_EVENT_VFORK_DONE, pid);
}
put_pid(pid);
} else {
nr = PTR_ERR(p); //错误处理
}
return nr; //返回子进程pid(父进程的fork函数返回的值为子进程pid的原因)
}
do_fork()主要完成了调用 copy_process() 复制父进程信息、获得pid、调用 wake_up_new_task 将子进程加入调度器队列等待获得分配 CPU资源运行、通过 clone_flags 标志做一些辅助工作。其中 copy_process()是创建一个进程内容的主要的代码。
下面分析copy_process()函数是如何复制父进程的。下面是精简后的代码:
static struct task_struct *copy_process(unsigned long clone_flags,
unsigned long stack_start,
unsigned long stack_size,
int __user *child_tidptr,
struct pid *pid,
int trace)
{
int retval;
struct task_struct *p;
...
retval = security_task_create(clone_flags);//安全性检查
...
p = dup_task_struct(current); //复制PCB,为子进程创建内核栈、进程描述符
ftrace_graph_init_task(p);
···
retval = -EAGAIN;
// 检查该用户的进程数是否超过限制
if (atomic_read(&p->real_cred->user->processes) >=
task_rlimit(p, RLIMIT_NPROC)) {
// 检查该用户是否具有相关权限,不一定是root
if (p->real_cred->user != INIT_USER &&
!capable(CAP_SYS_RESOURCE) && !capable(CAP_SYS_ADMIN))
goto bad_fork_free;
}
...
// 检查进程数量是否超过 max_threads,后者取决于内存的大小
if (nr_threads >= max_threads)
goto bad_fork_cleanup_count;
if (!try_module_get(task_thread_info(p)->exec_domain->module))
goto bad_fork_cleanup_count;
...
spin_lock_init(&p->alloc_lock); //初始化自旋锁
init_sigpending(&p->pending); //初始化挂起信号
posix_cpu_timers_init(p); //初始化CPU定时器
···
retval = sched_fork(clone_flags, p); //初始化新进程调度程序数据结构,把新进程的状态设置为TASK_RUNNING,并禁止内核抢占
...
// 复制所有的进程信息
shm_init_task(p);
retval = copy_semundo(clone_flags, p);
...
retval = copy_files(clone_flags, p);
...
retval = copy_fs(clone_flags, p);
...
retval = copy_sighand(clone_flags, p);
...
retval = copy_signal(clone_flags, p);
...
retval = copy_mm(clone_flags, p);
...
retval = copy_namespaces(clone_flags, p);
...
retval = copy_io(clone_flags, p);
...
retval = copy_thread(clone_flags, stack_start, stack_size, p);// 初始化子进程内核栈
...
//若传进来的pid指针和全局结构体变量init_struct_pid的地址不相同,就要为子进程分配新的pid
if (pid != &init_struct_pid) {
retval = -ENOMEM;
pid = alloc_pid(p->nsproxy->pid_ns_for_children);
if (!pid)
goto bad_fork_cleanup_io;
}
...
p->pid = pid_nr(pid); //根据pid结构体中获得进程pid
//若 clone_flags 包含 CLONE_THREAD标志,说明子进程和父进程在同一个线程组
if (clone_flags & CLONE_THREAD) {
p->exit_signal = -1;
p->group_leader = current->group_leader; //线程组的leader设为子进程的组leader
p->tgid = current->tgid; //子进程继承父进程的tgid
} else {
if (clone_flags & CLONE_PARENT)
p->exit_signal = current->group_leader->exit_signal;
else
p->exit_signal = (clone_flags & CSIGNAL);
p->group_leader = p; //子进程的组leader就是它自己
p->tgid = p->pid; //组号tgid是它自己的pid
}
...
if (likely(p->pid)) {
ptrace_init_task(p, (clone_flags & CLONE_PTRACE) || trace);
init_task_pid(p, PIDTYPE_PID, pid);
if (thread_group_leader(p)) {
...
// 将子进程加入它所在组的哈希链表中
attach_pid(p, PIDTYPE_PGID);
attach_pid(p, PIDTYPE_SID);
__this_cpu_inc(process_counts);
} else {
...
}
attach_pid(p, PIDTYPE_PID);
nr_threads++; //增加系统中的进程数目
}
...
return p; //返回被创建的子进程描述符指针P
...
}
copy_process 主要完成了调用 dup_task_struct 复制当前的进程()父进程描述符 task_struct、信息检查、初始化、把进程状态设置为 TASK_RUNNING(此时子进程置为就绪态)、采用写时复制技术逐一复制所有其他进程资源、调用 copy_thread 初始化子进程内核栈、设置子进程pid。其中比较关键的是dup_task_struct复制当前进程(父进程)描述符task_struct和copy_thread初始化子进程内核栈。
下面具体看dup_task_struct和copy_thread。
如下为dup_task_struct精简后的代码:
static struct task_struct *dup_task_struct(struct task_struct *orig)
{
struct task_struct *tsk;
struct thread_info *ti;
int node = tsk_fork_get_node(orig);
int err;
tsk = alloc_task_struct_node(node); //为子进程创建进程描述符
...
ti = alloc_thread_info_node(tsk, node); //实际上是创建了两个页,一部分用来存放 thread_info,一部分就是内核堆栈
...
err = arch_dup_task_struct(tsk, orig); //复制父进程的task_struct信息
...
tsk->stack = ti; // 将栈底的值赋给新结点的stack
setup_thread_stack(tsk, orig);//对子进程的thread_info结构进行初始化(复制父进程的thread_info 结构,然后将 task 指针指向子进程的进程描述符)
...
return tsk; // 返回新创建的进程描述符指针
...
}
如下为copy_thread精简后的代码:
int copy_thread(unsigned long clone_flags, unsigned long sp,
unsigned long arg, struct task_struct *p)
{
struct pt_regs *childregs = task_pt_regs(p);
struct task_struct *tsk;
int err;
p->thread.sp = (unsigned long) childregs;
p->thread.sp0 = (unsigned long) (childregs+1);
memset(p->thread.ptrace_bps, 0, sizeof(p->thread.ptrace_bps));
if (unlikely(p->flags & PF_KTHREAD)) {
/* kernel thread */
memset(childregs, 0, sizeof(struct pt_regs));
p->thread.ip = (unsigned long) ret_from_kernel_thread; //如果创建的是内核线程,则从ret_from_kernel_thread开始执行
task_user_gs(p) = __KERNEL_STACK_CANARY;
childregs->ds = __USER_DS;
childregs->es = __USER_DS;
childregs->fs = __KERNEL_PERCPU;
childregs->bx = sp; /* function */
childregs->bp = arg;
childregs->orig_ax = -1;
childregs->cs = __KERNEL_CS | get_kernel_rpl();
childregs->flags = X86_EFLAGS_IF | X86_EFLAGS_FIXED;
p->thread.io_bitmap_ptr = NULL;
return 0;
}
*childregs = *current_pt_regs();//复制内核堆栈(复制父进程的寄存器信息,即系统调用SAVE_ALL压栈的那一部分内容)
childregs->ax = 0; //子进程的eax置为0,所以fork的子进程返回值为0
...
p->thread.ip = (unsigned long) ret_from_fork;//ip指向 ret_from_fork,子进程从此处开始执行
task_user_gs(p) = get_user_gs(current_pt_regs());
...
return err;
总的来说,进程的创建过程大致是复制进程描述符、一一复制其他进程资源(采用写时复制技术)、分配子进程的内核堆栈并对内核堆栈关键信息进行初始化。
第三部分 课本知识
Linux进程运行状态

- 运行状态(TASK_RUNNING)
当进程正在被CPU执行,或已经准备就绪随时可由调度程序执行,则称该进程为处于运行状态(running)。进程可以在内核态运行,也可以在用户态运行。当系统资源已经可用时,进程就被唤醒而进入准备运行状态,该状态称为就绪态。这些状态(图中中间一列)在内核中表示方法相同,都被成为处于TASK_RUNNING状态。 - 可中断睡眠状态(TASK_INTERRUPTIBLE)
当进程处于可中断等待状态时,系统不会调度该进行执行。当系统产生一个中断或者释放了进程正在等待的资源,或者进程收到一个信号,都可以唤醒进程转换到就绪状态(运行状态)。 - 暂停状态(TASK_STOPPED)
当进程收到信号SIGSTOP、SIGTSTP、SIGTTIN或SIGTTOU时就会进入暂停状态。可向其发送SIGCONT信号让进程转换到可运行状态。 - 僵死状态(TASK_ZOMBIE)
当进程已停止运行,但其父进程还没有询问其状态时,则称该进程处于僵死状态。 - 不可中断睡眠状态(TASK_UNINTERRUPTIBLE)
与可中断睡眠状态类似。但处于该状态的进程只有被使用wake_up()函数明确唤醒时才能转换到可运行的就绪状态。
当一个进程的运行时间片用完,系统就会使用调度程序强制切换到其它的进程去执行。另外,如果进程在内核态执行时需要等待系统的某个资源,此时该进程就会调用
sleep_on()或sleep_on_interruptible()自愿地放弃CPU的使用权,而让调度程序去执行其它进程。进程则进入睡眠状
态(TASK_UNINTERRUPTIBLE或TASK_INTERRUPTIBLE)。
只有当进程从“内核运行态”转移到“睡眠状态”时,内核才会进行进程切换操作。在内核态下运行的进程不能被其它进程抢占,而且一个进程不能改变另一个进程的状态。为了避免进程切换时造成内核数据错误,内核在执行临界区代码时会禁止一切中断。
2018-2019-1 20189203 《Linux内核原理与分析》第七周作业的更多相关文章
- 2019-2020-1 20199329《Linux内核原理与分析》第九周作业
<Linux内核原理与分析>第九周作业 一.本周内容概述: 阐释linux操作系统的整体构架 理解linux系统的一般执行过程和进程调度的时机 理解linux系统的中断和进程上下文切换 二 ...
- 2019-2020-1 20199329《Linux内核原理与分析》第二周作业
<Linux内核原理与分析>第二周作业 一.上周问题总结: 未能及时整理笔记 Linux还需要多用 markdown格式不熟练 发布博客时间超过规定期限 二.本周学习内容: <庖丁解 ...
- 20169212《Linux内核原理与分析》第二周作业
<Linux内核原理与分析>第二周作业 这一周学习了MOOCLinux内核分析的第一讲,计算机是如何工作的?由于本科对相关知识的不熟悉,所以感觉有的知识理解起来了有一定的难度,不过多查查资 ...
- 20169210《Linux内核原理与分析》第二周作业
<Linux内核原理与分析>第二周作业 本周作业分为两部分:第一部分为观看学习视频并完成实验楼实验一:第二部分为看<Linux内核设计与实现>1.2.18章并安装配置内核. 第 ...
- 2018-2019-1 20189221 《Linux内核原理与分析》第九周作业
2018-2019-1 20189221 <Linux内核原理与分析>第九周作业 实验八 理理解进程调度时机跟踪分析进程调度与进程切换的过程 进程调度 进度调度时机: 1.中断处理过程(包 ...
- 2017-2018-1 20179215《Linux内核原理与分析》第二周作业
20179215<Linux内核原理与分析>第二周作业 这一周主要了解了计算机是如何工作的,包括现在存储程序计算机的工作模型.X86汇编指令包括几种内存地址的寻址方式和push.pop.c ...
- 2019-2020-1 20209313《Linux内核原理与分析》第二周作业
2019-2020-1 20209313<Linux内核原理与分析>第二周作业 零.总结 阐明自己对"计算机是如何工作的"理解. 一.myod 步骤 复习c文件处理内容 ...
- 2018-2019-1 20189221《Linux内核原理与分析》第一周作业
Linux内核原理与分析 - 第一周作业 实验1 Linux系统简介 Linux历史 1991 年 10 月,Linus Torvalds想在自己的电脑上运行UNIX,可是 UNIX 的商业版本非常昂 ...
- 《Linux内核原理与分析》第一周作业 20189210
实验一 Linux系统简介 这一节主要学习了Linux的历史,Linux有关的重要人物以及学习Linux的方法,Linux和Windows的区别.其中学到了LInux中的应用程序大都为开源自由的软件, ...
- 2018-2019-1 20189221《Linux内核原理与分析》第二周作业
读书报告 <庖丁解牛Linux内核分析> 第 1 章 计算工作原理 1.1 存储程序计算机工作模型 1.2 x86-32汇编基础 1.3汇编一个简单的C语言程序并分析其汇编指令执行过程 因 ...
随机推荐
- window10下TensorFlow-gpu环境搭建
安装python 下载python3.5.4 https://www.python.org/downloads/release/python-354/ 选择Windows x86-64 executa ...
- V-Charts中使用extend属性定制词云图
[本文出自天外归云的博客园] 简介 在Vue中使用E-Charts可以用V-Charts,词云图在V-Charts官网中介绍比较简单,如果想更多定制的话,官网上说要在extend属性中进行扩展. V- ...
- 备份与还原ORACLE数据库(通过CMD命令执行)
31.1:(若用程序调用cmd,则在备份和还原 末尾语句加上 2>&1 ,直接运行则不需要加) --备份: 1) exp SA/"""abc@123 ...
- Navicat 提示 Access violation at address ***(如004ECCF4) in module ‘navicat.exe’. Read of address ***(如00000048)
Navicat 提示 Access violation at address ***(如004ECCF4) in module ‘navicat.exe’. Read of address ***(如 ...
- 微信开发时调用jssdk,在安卓设备中成功调用;在ios设备中返回错误消息:config fail,无其他具体错误消息,且接口权限显示获取ok,无法调用
js代码如下: JavaScript code ? 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 ...
- 【算法】八皇后问题 Python实现
[八皇后问题] 问题: 国际象棋棋盘是8 * 8的方格,每个方格里放一个棋子.皇后这种棋子可以攻击同一行或者同一列或者斜线(左上左下右上右下四个方向)上的棋子.在一个棋盘上如果要放八个皇后,使得她们互 ...
- Ubuntu 16.10 server 相关
1)安装图形化界面 sudo apt-get install xinit sudo apt-get install gnome 2)启用root账号 ① sudo passwd root ② 修改/e ...
- HAWQ集成Yarn HA作为资源管理服务
一.第一步当然是配置YARN HA,这在使用ambari管理时很简单,这里不在赘述. 二.建立HAWQ的专用资源队列queue 不要手工编辑scheduler设置,最方便的当然是使用queue man ...
- 【深入Java虚拟机】一 JVM类加载过程
首先Throws(抛出)几个自己学习过程中一直疑惑的问题: 1.什么是类加载?什么时候进行类加载? 2.什么是类初始化?什么时候进行类初始化? 3.什么时候会为变量分配内存? 4.什么时候会为变量赋默 ...
- Java开发面试题整理(2019春招)
一.Java基础部分 1. HashMap和Hashtable各有什么特点,它们有什么区别?(必背题,超级重要) HashMap和Hashtable都实现了Map接口,但决定用哪一个之前先要弄清楚它们 ...