Crashing Robots(imitate)
| Time Limit: 1000MS | Memory Limit: 65536K | |
| Total Submissions: 8124 | Accepted: 3528 |
Description
Input
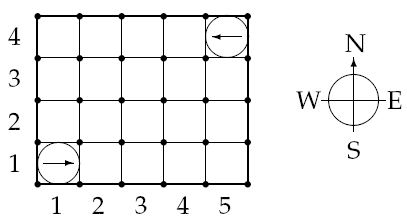 Figure 1: The starting positions of the robots in the sample warehouseFinally there are M lines, giving the instructions in sequential order. An instruction has the following format: < robot #> < action> < repeat> Where is one of
Figure 1: The starting positions of the robots in the sample warehouseFinally there are M lines, giving the instructions in sequential order. An instruction has the following format: < robot #> < action> < repeat> Where is one of
- L: turn left 90 degrees,
- R: turn right 90 degrees, or
- F: move forward one meter,
and 1 <= < repeat> <= 100 is the number of times the robot should perform this single move.
Output
- Robot i crashes into the wall, if robot i crashes into a wall. (A robot crashes into a wall if Xi = 0, Xi = A + 1, Yi = 0 or Yi = B + 1.)
- Robot i crashes into robot j, if robots i and j crash, and i is the moving robot.
- OK, if no crashing occurs.
Only the first crash is to be reported.
Sample Input
4
5 4
2 2
1 1 E
5 4 W
1 F 7
2 F 7
5 4
2 4
1 1 E
5 4 W
1 F 3
2 F 1
1 L 1
1 F 3
5 4
2 2
1 1 E
5 4 W
1 L 96
1 F 2
5 4
2 3
1 1 E
5 4 W
1 F 4
1 L 1
1 F 20
Sample Output
Robot 1 crashes into the wall
Robot 1 crashes into robot 2
OK
Robot 1 crashes into robot 2
Source
#include<stdio.h>
#include<iostream>
#include<math.h>
#include<string.h>
using namespace std;
struct robot
{
int x , y ;
int dir ;
}a[]; struct instruction
{
int num ;
char act ;
int rep ;
}ins[]; int EW , NS ;
int n , m ;
bool flag ;
int map[][]; void crash (int No)
{
int k = ins[No].rep ;
int t = ins[No].num ;
map[a[t].x][a[t].y] = ;
switch (a[t].dir)
{
case :
for (int i = ; i < k && a[t].x && a[t].y ; i++)
if (map[a[t].x][++a[t].y]) {
flag = ;
printf ("Robot %d crashes into robot %d\n" , t , map[a[t].x][a[t].y]) ;
break ;
}
break ;
case :
for (int i = ; i < k && a[t].x && a[t].y ; i++)
if (map[++a[t].x][a[t].y]) {
flag = ;
printf ("Robot %d crashes into robot %d\n" , t , map[a[t].x][a[t].y]) ;
break ;
}
break ;
case :
for (int i = ; i < k && a[t].x && a[t].y ; i++)
if (map[a[t].x][--a[t].y]) {
flag = ;
printf ("Robot %d crashes into robot %d\n" , t , map[a[t].x][a[t].y]) ;
break ;
}
break ;
case :
for (int i = ; i < k && a[t].x && a[t].y; i++)
if (map[--a[t].x][a[t].y]) {
flag = ;
printf ("Robot %d crashes into robot %d\n" , t , map[a[t].x][a[t].y]) ;
break ;
}
break ;
}
map[a[t].x][a[t].y] = t ;
if (a[t].x == || a[t].x >= EW + || a[t].y == || a[t].y >= NS + ) {
printf ("Robot %d crashes into the wall\n" , t) ;
flag = ;
}
}
void solve (int No)
{
int k = ins[No].num ;
switch (ins[No].act)
{
case 'L' : a[k].dir -= ins[No].rep ; a[k].dir %= ; a[k].dir += ; a[k].dir %= ; break ;
case 'R' : a[k].dir += ins[No].rep ; a[k].dir %= ; a[k].dir += ; a[k].dir %= ; break ;
case 'F' : crash (No) ;
}
}
int main ()
{
// freopen ("a.txt" , "r" , stdin) ;
int T ;
scanf ("%d" , &T) ;
char temp ;
while (T--) {
memset (map , , sizeof(map) ) ;
scanf ("%d%d" , &EW , &NS) ;
scanf ("%d%d" , &n , &m) ;
for (int i = ; i <= n ; i++) {
cin >> a[i].x >> a[i].y >> temp ;
// cout << temp <<endl ;
map[a[i].x][a[i].y] = i ;
switch (temp)
{
case 'E' : a[i].dir = ; break ;
case 'S' : a[i].dir = ; break ;
case 'W' : a[i].dir = ; break ;
case 'N' : a[i].dir = ; break ;
}
// printf ("a[%d].dir=%d\n" , i , a[i].dir) ;
}
for (int i = ; i < m ; i++)
cin >> ins[i].num >> ins[i].act >> ins[i].rep ; flag = ;
// printf ("a[1].dir=%d\n" , a[1].dir) ;
for (int i = ; i < m ; i++) {
/* for (int i = 1 ; i <= EW ; i++) {
for (int j = 1 ; j <= NS ; j++) {
printf ("%d " , map[i][j]) ;
}
puts("");
}
puts ("") ;*/
solve (i) ;
/* for (int i = 1 ; i <= EW ; i++) {
for (int j = 1 ; j <= NS ; j++) {
printf ("%d " , map[i][j]) ;
}
puts("");
}
printf ("\n\n\n") ; */
if (flag)
break ;
} if (!flag)
puts ("OK") ;
}
return ;
}
规规矩矩得模拟 robot 一步步走就行了
Crashing Robots(imitate)的更多相关文章
- POJ2632 Crashing Robots(模拟)
题目链接. 分析: 虽说是简单的模拟,却调试了很长时间. 调试这么长时间总结来的经验: 1.坐标系要和题目建的一样,要不就会有各种麻烦. 2.在向前移动过程中碰到其他的机器人也不行,这个题目说啦:a ...
- poj 2632 Crashing Robots(模拟)
链接:poj 2632 题意:在n*m的房间有num个机器,它们的坐标和方向已知,现给定一些指令及机器k运行的次数, L代表机器方向向左旋转90°,R代表机器方向向右旋转90°,F表示前进,每次前进一 ...
- Codeforces Round #625 (Div. 2, based on Technocup 2020 Final Round) A. Contest for Robots(数学)
题意: n 道题,2 个答题者,已知二者的做题情况,你是受贿裁判,可以给每题指定分值(≥1),求甲乙分数(甲>乙)相差最小时最大分值的最小值. 思路: 统计只有甲或乙做出的题目数. 加一取下整判 ...
- POJ 2632 Crashing Robots(较为繁琐的模拟)
题目链接:http://poj.org/problem?id=2632 题目大意:题意简单,N个机器人在一个A*B的网格上运动,告诉你机器人的起始位置和对它的具体操作,输出结果: 1.Robot i ...
- ZOJ 1654 Place the Robots(最大匹配)
Robert is a famous engineer. One day he was given a task by his boss. The background of the task was ...
- [AGC004E] Salvage Robots (DP)
Description 蛤蟆国的领土我们可以抽象为H*W的笼子,在这片蛤土上,有若干个机器人和一个出口,其余都是空地,每次蛤蟆会要求让所有的机器人向某个方向移动一步,当机器人移动到出口时会被蛤蟆活摘出 ...
- 【ZOJ1003】Crashing Balloon(DFS)
Crashing Balloon Time Limit: 2 Seconds Memory Limit: 65536 KB On every June 1st, the Children's ...
- UVALive 7464 Robots (贪心)
Robots 题目链接: http://acm.hust.edu.cn/vjudge/contest/127401#problem/K Description http://7xjob4.com1.z ...
- UVALive 7464 Robots(模拟)
7464Robots Write a program to collect data from robots. We are given two sets of robotsX=fX1;:::;Xmg ...
随机推荐
- Enum扩展及MVC中DropDownListFor扩展方法的使用
public enum SearchState { /// <summary> /// 全部 /// </summary> [Description("全部" ...
- 使用DOM动态创建标签
本文是参考<javascript Dom 编程艺术>第八章的内容所写,用到的知识点,就是关于创建平稳的web页面. 使用DOM方法: getElementById() getElement ...
- 阿里面试回来,想和Java程序员谈一谈(转载)
引言 其实本来真的没打算写这篇文章,主要是LZ得记忆力不是很好,不像一些记忆力强的人,面试完以后,几乎能把自己和面试官的对话都给记下来.LZ自己当初面试完以后,除了记住一些聊过的知识点以外,具体的内容 ...
- 常用的Java 架包(jar)的用途
前言:如果需要在项目中引入jar包,可以采用maven,配置方式在 http://mvnrepository.com 查询 slf4j-api 简介:slf4j并不是一种具体的日志系统,而是一个用户 ...
- Java设计模式-抽象工厂模式(Abstract Factory )
工厂方法模式有一个问题就是,类的创建依赖工厂类,也就是说,如果想要拓展程序,必须对工厂类进行修改,这违背了闭包原则,所以,从设计角度考虑,有一定的问题,如何解决?就用到抽象工厂模式,创建多个工厂类,这 ...
- 13. (转) Android一些布局属性详解
RelativeLayout用到的一些重要的属性: 第一类:属性值为true或false android:layout_centerHrizontal 水平居中 android:l ...
- 【BZOJ-3651&3081】网络通信&StrangeRegulations Link-Cut-Tree
3651: 网络通信 Time Limit: 10 Sec Memory Limit: 256 MBSubmit: 90 Solved: 61[Submit][Status][Discuss] D ...
- BZOJ-2929 洞穴攀岩 最大流Dinic(傻逼题)
竟然没有1A真羞耻...1分钟不到读完题,10分钟不到打完....MD没仔细看...WA了一遍,贱! 2929: [Poi1999]洞穴攀行 Time Limit: 1 Sec Memory Limi ...
- BZOJ-2186 沙拉公主的困惑 线性筛(筛筛筛)+线性推逆元
2186: [Sdoi2008]沙拉公主的困惑 Time Limit: 10 Sec Memory Limit: 259 MB Submit: 2417 Solved: 803 [Submit][St ...
- 搭建一个springMVC项目以及遇到的问题
首先找到jar包(lz现在还在学习maven,以后回了,就用maven了,自己配置时,jar包不全就很容易到时搭建失败)