自适应滤波:维纳滤波器——LCMV及MVDR实现
作者:桂。
时间:2017-03-24 06:52:36
链接:http://www.cnblogs.com/xingshansi/p/6609317.html
声明:欢迎被转载,不过记得注明出处哦~
【读书笔记03】
前言
西蒙.赫金的《自适应滤波器原理》第四版,上一篇看到维纳滤波基本形式:最优化问题,且无任何条件约束。这次看到有约束的部分,简单整理一下思路:
1)拉格朗日乘子法;
2)线性约束最小方差滤波器(Linearly constrained minimum-variance,LCMV);
3)谱估计之MVDR算法(Minimum variance distortionless response ,MVDR);
内容为自己的学习总结,如有错误之处,还请各位帮忙指出!
一、拉格朗日乘子法
学习到含有约束条件的Wiener Filter,拉格朗日乘子法是解决:将含约束条件的优化问题转化为无约束条件优化问题的途径,故先梳理一下。
A-只含一个等式约束的最优化
实函数$f\left( {\bf{w}} \right)$是参数向量${\bf{w}}$的二次函数,约束条件是:
${{{\bf{w}}^H}{\bf{s}} = g}$
其中$\bf{s}$是已知向量,$g$是复常数。例如在波束形成应用中${\bf{w}}$表示各传感器输出的一组复数权值,$\bf{s}$是一个旋转向量。假设该问题是一个最小化问题,令$c\left( {\bf{w}} \right) = {{\bf{w}}^H}{\bf{s}} - g = 0 + j0$可以描述为:
所谓拉格朗日乘子法,就是引入拉格朗日乘子:将上述约束最小化问题转化为无约束问题,定义一个新的实函数:
$h\left( {\bf{w}} \right) = f\left( {\bf{w}} \right) + {\lambda _1}{\mathop{\rm Re}\nolimits} \left[ {c\left( {\bf{w}} \right)} \right] + {\lambda _2}{\mathop{\rm Im}\nolimits} \left[ {c\left( {\bf{w}} \right)} \right]$
现在定义一个复拉格朗日乘子:
$\lambda = {\lambda _1} + {\lambda _2}$
$h({\bf{w}})$改写为:
$h\left( {\bf{w}} \right) = f\left( {\bf{w}} \right) + {\mathop{\rm Re}\nolimits} \left[ {{\lambda ^*}c\left( {\bf{w}} \right)} \right]$
至此,无约束优化问题转化完成,利用偏导求参即可,其实这是一个简化的形式,分别求解$\lambda _1$、$\lambda _2$也是一样的。
B-包含多个等式约束的最优化
实函数$f\left( {\bf{w}} \right)$是参数向量${\bf{w}}$的二次函数,约束条件是:
${{{\bf{w}}^H}{\bf{s_k}} = g_k}$
其中$k = 1,2...K$,方法同单个约束情况相同,求解伴随方程:
$\frac{{\partial f}}{{\partial {{\bf{w}}^*}}} + \sum\limits_{k = 1}^K {\frac{\partial }{{\partial {{\bf{w}}^*}}}\left( {{\mathop{\rm Re}\nolimits} \left[ {\lambda _k^*{c_k}\left( {\bf{w}} \right)} \right]} \right)} = {\bf{0}}$
此时与多个等式约束联合成方程组,这个方程组定义了${\bf{w}}$和拉格朗日乘子${\lambda _1}$、${\lambda _2}$...${\lambda _K}$的解。
二、线性约束最小方差滤波器
之前看到的维纳滤波都是基于最小均方误差准则,而没有添加任何约束,此处考虑含有线性约束情况下的方差滤波器,文中给了一个图:
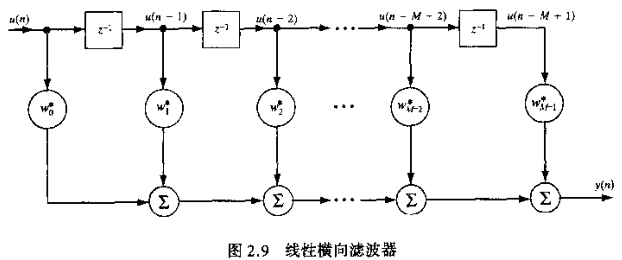
其中$x(n)$为输入信号(即$u$,为了与下文统一,用$x$表示),$w_i$为权重,$y(n)$为滤波器输出:
$y\left( n \right) = \sum\limits_{k = 0}^{M - 1} {{w^*_k}x\left( {n - k} \right)} $
这个优化问题如果没有约束可以表述为:
$\arg \mathop {\min }\limits_{\bf{w}} J = E\left[ {{y^H}y} \right]$
假设$\theta_0$为目标达到角,希望对该角度特殊处理:如果该角是目标角,希望其幅度保持不衰减,即$\sum\limits_{k = 0}^{M - 1} {{w^*_k}{e^{ - jk{\theta _0}}}} = 1$;反之,如果是干扰信号,希望其幅度衰减为0,即$\sum\limits_{k = 0}^{M - 1} {{w^*_k}{e^{ - jk{\theta _0}}}} = 0$;无论是0还是1,都是对优化问题的一种约束形式,写出更一般的约束形式:
$\sum\limits_{k = 0}^{M - 1} {{w^*_k}{e^{ - jk{\theta _0}}}} = g$
$g$是一个复增益。利用拉格朗日乘子法给出约束条件下准则函数(暂不考虑噪声情况):
$J = {{\bf{w}}^H}{R_{xx}}{\bf{w}} + {\mathop{\rm Re}\nolimits} \left[ {{\lambda ^*}\left[ {{{\bf{w}}^H}{\bf{s}}\left( {{\theta _0}} \right) - g} \right]} \right]$
其中${\bf{s}}\left( {{\theta _0}} \right) = \left[ {1,{e^{ - j{\theta _0}}},...,{e^{ - j(M - 1){\theta _0}}}} \right]$,$M$是权向量$\bf{w}$的个数,则到系数解:
$\lambda = - \frac{{2g}}{{{{\bf{s}}^H}\left( {{\theta _0}} \right){{\bf{R}}^{ - 1}}{\bf{s}}\left( {{\theta _0}} \right)}}$
对应最优权向量:
${{\bf{w}}_{opt}} = \frac{{{g^*}{{\bf{R}}^{ - 1}}{\bf{s}}\left( {{\theta _0}} \right)}}{{{{\bf{s}}^H}\left( {{\theta _0}} \right){{\bf{R}}^{ - 1}}{\bf{s}}\left( {{\theta _0}} \right)}}$
以权向量${{\bf{w}}_{opt}}$表征的波束形成器称为线性约束最小方差(LCMV, linearly constrained minimum-variance)波束形成器,也称LCMV滤波器。
三、LCMV应用——MVDR算法
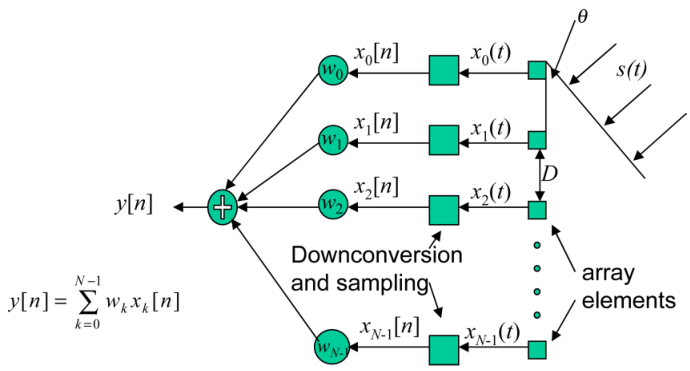
实际应用中信号掺杂了噪声。假设原信号$s(t)$,接收器收集的是不同时延的混合信号,经过采样量化后得$x(n)$,现在希望通过自适应权重$w$输出符合需求的$y$,假设通道个数为$N$,给出接收通道模型:
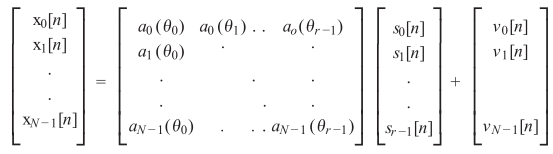
写成矩阵形式:

进行相关矩阵求解:

可以发现如果$w^Hw$为定值,则噪声对最优权值的求解无影响,LCMV可用。
给出混合模型:
对应准则函数(此处$g = 1$):

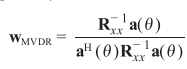
借助LCMV的分析,得出MVDR最优权重:
实际应用中,通常用时间换空间,借助遍历性近似求解相关矩阵:
给出代码:
doas=[-30 -5 40]*pi/180; %DOA's of signals in rad.
P=[1 1 1]; %Power of incoming signals
N=10; %Number of array elements
K=1024; %Number of data snapshots
d=0.5; %Distance between elements in wavelengths
noise_var=40; %Variance of noise
r=length(doas); %Total number of signals
% Steering vector matrix. Columns will contain the steering vectors of the r signals
A=exp(-i*2*pi*d*(0:N-1)'*sin([doas(:).']));
% Signal and noise generation
sig=round(rand(r,K))*2-1; % Generate random BPSK symbols for each of the
% r signals
noise=sqrt(noise_var/2)*(randn(N,K)+i*randn(N,K)); %Uncorrelated noise
X=A*diag(sqrt(P))*sig+noise; %Generate data matrix
R=X*X'/K; %Spatial covariance matrix
%MVDR
IR=inv(R); %Inverse of covariance matrix
for k=1:length(angles)
mvdr(k)=1/(a1(:,k)'*IR*a1(:,k));
end
figure;
plot(angles,abs(mvdr)/max(abs(mvdr)),'k');hold on;
xlabel('Angle in degrees')
%Estimate DOA's using the classical beamformer
for k=1:length(angles)
Classical(k)=(a1(:,k)'*R*a1(:,k));
end
plot(angles,abs(Classical)/max(abs(Classical)),'r--');grid on;
legend('MVDR','Classical Beamformer');
对应结果图:
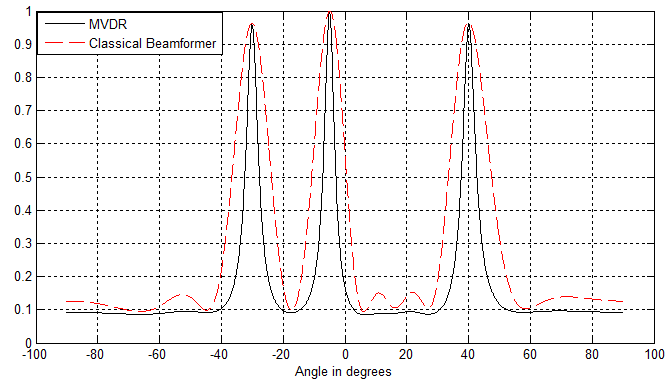
噪声较大时:

二者就比较接近,可以发现:
- 信号与噪声不相关、且噪声为白噪声时,仍能求解最优权值;
- 噪声较大时,MVDR与无约束最优滤波效果接近,此时MVDR的优势不再明显,这也容易理解,噪声占主要成分时对波束的约束保留效果不再明显。
两点补充:
1)因为LCMV中有矩阵求逆一项,所以补充说明一点:默认不同角度信号不相干,只记录学习的理论知识,不论及技术细节处。
2)基于窄带分析。如果是宽带,则可以划分多个自带,或者利用聚焦矩阵预处理,窄带才有如下近似(且一个频带内才可以用一个频率表征):
参考:
Jeffrey Foutz, Andreas Spanias, and Mahesh K. Banavar《Narrowband Direction of Arrival Estimation for Antenna Arrays》.
Simon Haykin 《Adaptive Filter Theory Fourth Edition》.
自适应滤波:维纳滤波器——LCMV及MVDR实现的更多相关文章
- 自适应滤波:维纳滤波器——FIR及IIR设计
作者:桂. 时间:2017-03-23 06:28:45 链接:http://www.cnblogs.com/xingshansi/p/6603263.html [读书笔记02] 前言 仍然是西蒙. ...
- 自适应滤波:最小均方误差滤波器(LMS、NLMS)
作者:桂. 时间:2017-04-02 08:08:31 链接:http://www.cnblogs.com/xingshansi/p/6658203.html 声明:欢迎被转载,不过记得注明出处哦 ...
- 自适应滤波:维纳滤波器——GSC算法及语音增强
作者:桂. 时间:2017-03-26 06:06:44 链接:http://www.cnblogs.com/xingshansi/p/6621185.html 声明:欢迎被转载,不过记得注明出处哦 ...
- 自适应滤波——线性预测(LPC)
作者:桂. 时间:2017-03-26 10:12:07 链接:http://www.cnblogs.com/xingshansi/p/6621914.html 声明:欢迎被转载,不过记得注明出处哦 ...
- 自适应滤波原理及simulink
- 自适应滤波:奇异值分解SVD
作者:桂. 时间:2017-04-03 19:41:26 链接:http://www.cnblogs.com/xingshansi/p/6661230.html 声明:欢迎被转载,不过记得注明出处哦 ...
- 【自适应波束形成】MVDR(Minimum Variance Distortionless Response )笔记
参考: https://blog.csdn.net/qq_40981790/article/details/80143524 1. MVDR简介(Minimum Variance Distortion ...
- 七中滤波方法测试matlab实现
http://blog.163.com/xiaheng0804@126/blog/static/1205282120132129471816/ 创建两个混合信号,便于更好测试滤波器效果.同时用七中滤波 ...
- 自适应滤波器(Adaptive Filter)
======= Wikipedia的解释 ======= 自适应滤波器是能够根据输入信号自动调整性能进行数字信号处理的数字滤波器.作为对比,非自适应滤波器有静态的滤波器系数,这些静态系数一起组成传递函 ...
随机推荐
- MACD判断定背离,底背离
MACD背离: 价格创新高而指标却下跌 价格创新低而指标却上涨 缠中说禅背离 多次缠绕中唇吻的面积更小 看图说话:
- JDK5.0 特性-线程任务执行架构 ScheduledExecutorService
来自:http://www.cnblogs.com/taven/archive/2011/12/17/2291469.html import java.util.concurrent.Callable ...
- js 原型链 prototype __proto__
1.说明 函数(Function)才有prototype属性,对象(除Object)拥有__proto__. 2.prototype与__proto__区别 示例: <!DOCTYPE html ...
- JUC-Condition和Lock实践-线程按序交替执行
编写一个程序,开启 3 个线程,这三个线程的 ID 分别为 A.B.C,每个线程将自己的 ID 在屏幕上打印 10 遍,要求输出的结果必须按顺序显示.如:ABCABCABC…… 依次递归 这里只使用c ...
- nginx 代理静态资源报 403
用tomcat跑了一个上传服务,文件上传到指定nginx的html目录,用nginx来代理静态资源,结果上传能够成功,访问却报403. 解决办法,将html的拥有者改成nobody: chown -R ...
- Liability
Liability li·a·bil·i·ty ˌlīəˈbilədē/ noun A person or thing whose presence or behavior is likely ...
- win32下编译glog
既然编译第三方库了,google提供的VSproject是老版本的,构建不好升级.所以还是用cmake是王道. 采用out of source 编译, 以下是编译脚本bat: mkdir build ...
- Oracle的关于小数的使用
整理了部分Oracle的关于小数的使用方法,如下 --round(x,[y]) 舍入到小数点右边y位的x值 ) from dual; --1.235 --trunc(x,[y])返回截尾到y位小数的x ...
- Swift3 substring几种常用用法
举例: " let length = str.characters.count //截取前四位 )) //截取后2位(两种方法) )) )) //截取中间4位,从第2位开始(二种方法) le ...
- 聚集函数查询结果为空, list的size是1, resolve
resultList.removeAll(Collections.singleton(null));