opencv笔记--SURF
SURF(Speeded-Up Robust Features) 是对 SIFT 得改进,相对于 SIFT,SURF 利用积分图像与盒函数模拟 DoG,提升了计算速度;同时,使用了一种不用于 SIFT 的特征描述方案。
在 SIFT 中,检测尺度空间极值使用了 DoG 响应,SURF 做了如下改进:
1)首先求原图像的积分图像,使用积分图像可以求任意尺度盒函数(Box Filter)响应;
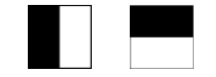
2)使用 Box Fitler 代替 DoG,下图给出了垂直方向与xy方向的 Box Filter,使用积分图像求任意尺寸响应时间都是固定的;

3)在  空间寻找极值作为候选特征点,定义 Hessian 矩阵
空间寻找极值作为候选特征点,定义 Hessian 矩阵  ,其中,G 为高斯函数,I 为图像函数;
,其中,G 为高斯函数,I 为图像函数;
剔除 Det(H) 小于某固定值的候选特征点,得到较好的极值点;
4)使用小波函数计算特征点附近响应,该响应仍然可在积分图像上计算;然后以 60 度为步长在圆形上滑动,求每个窗口响应和并将响应和最大方向作为主方向;
5)将特征点区域分为 4 * 4 小区域,在小区域内再次应用小波函数,并分别求出响应和,可构成向量  ,最终构成 4 * 4 * 4 = 64 维特征向量;
,最终构成 4 * 4 * 4 = 64 维特征向量;
一种扩展方式是区分 dx,dy 方向,分别统计 dy > 0 时对应的 dx 求和,dy < 0 时对应的 dx 求和...,这样将 v 扩展为 8 维向量,最终形成 4 * 4 * 8 = 128 维特征向量;
opencv 提供了 SURF 实现,其构造函数如下:
SURF(double hessianThreshold, int nOctaves=4, int nOctaveLayers=2, bool extended=true, bool upright=false);
hessianThreshold:当候选特征点的 Hessian 矩阵行列式值小于该值时,忽略该候选特征点;
nOctaves:表示高斯金字塔层数,当层数越多时,可检测到更粗的特征点;
nOctaveLayers:检测尺度空间上极值使用层数为 nOctaveLayers + 3;
extended:是否使用扩展特征描述,默认特征点描述向量为64维,扩展特征点描述向量为128维;
upright:当特征点方向不改变时,在描述特征点时可不计算特征点主方向;
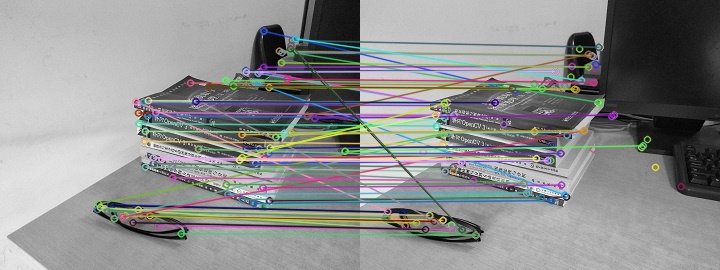
SURF 特征匹配代码与 SIFT 基本一致,如下:
1 cv::Mat img1 = cv::imread("a.jpg", cv::IMREAD_GRAYSCALE);
2 cv::Mat img2 = cv::imread("b.jpg", cv::IMREAD_GRAYSCALE);
3
4 cv::SurfFeatureDetector detector(2000);
5 std::vector<cv::KeyPoint> keypoints1, keypoints2;
6 cv::Mat descriptors1, descriptors2;
7 detector.operator()(img1, cv::noArray(), keypoints1, descriptors1);
8 detector.operator()(img2, cv::noArray(), keypoints2, descriptors2);
9
10 cv::BFMatcher matcher(cv::NORM_L2);
11 std::vector<DMatch> matches;
12 matcher.match(descriptors1, descriptors2, matches);
13
14 cv::Mat img_matches;
15 cv::drawMatches(img1, keypoints1, img2, keypoints2, matches, img_matches);
16 cv::imwrite("c.jpg", img_matches);
17
18 double min_dist = 100;
19
20 for (int i = 0; i < matches.size(); i++)
21 {
22 double dist = matches[i].distance;
23 if (dist < min_dist) min_dist = dist;
24 }
25
26
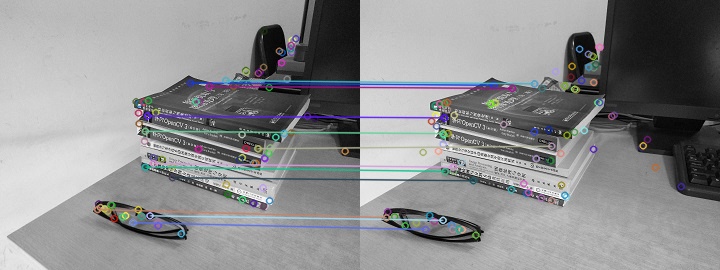
27 // Draw only "good" matches (i.e. whose distance is less than 2*min_dist,
28 // or a small arbitary value ( 0.02 )
29 std::vector< DMatch > good_matches;
30 for (int i = 0; i < matches.size(); i++)
31 {
32 if (matches[i].distance <= max(2 * min_dist, 0.02))
33 {
34 good_matches.push_back(matches[i]);
35 }
36 }
37
38 cv::drawMatches(img1, keypoints1, img2, keypoints2, good_matches, img_matches);
39 cv::imwrite("d.jpg", img_matches);
参考资料 SURF: Speeded Up Robust Features Herbert Bay & Tinne Tuylelaars & Luc Van Gool
Learning OpenCV 3 Adrian Kaehler & Gary Bradski
opencv笔记--SURF的更多相关文章
- opencv笔记6:角点检测
time:2015年10月09日 星期五 23时11分58秒 # opencv笔记6:角点检测 update:从角点检测,学习图像的特征,这是后续图像跟踪.图像匹配的基础. 角点检测是什么鬼?前面一篇 ...
- OpenCV笔记大集锦(转载)
整理了我所了解的有关OpenCV的学习笔记.原理分析.使用例程等相关的博文.排序不分先后,随机整理的.如果有好的资源,也欢迎介绍和分享. 1:OpenCV学习笔记 作者:CSDN数量:55篇博文网址: ...
- opencv笔记5:频域和空域的一点理解
time:2015年10月06日 星期二 12时14分51秒 # opencv笔记5:频域和空域的一点理解 空间域和频率域 傅立叶变换是f(t)乘以正弦项的展开,正弦项的频率由u(其实是miu)的值决 ...
- opencv笔记4:模板运算和常见滤波操作
time:2015年10月04日 星期日 00时00分27秒 # opencv笔记4:模板运算和常见滤波操作 这一篇主要是学习模板运算,了解各种模板运算的运算过程和分类,理论方面主要参考<图像工 ...
- opencv笔记3:trackbar简单使用
time:2015年 10月 03日 星期六 13:54:17 CST # opencv笔记3:trackbar简单使用 当需要测试某变量的一系列取值取值会产生什么结果时,适合用trackbar.看起 ...
- opencv笔记2:图像ROI
time:2015年 10月 03日 星期六 12:03:45 CST # opencv笔记2:图像ROI ROI ROI意思是Region Of Interests,感兴趣区域,是一个图中的一个子区 ...
- opencv笔记1:opencv的基本模块,以及环境搭建
opencv笔记1:opencv的基本模块,以及环境搭建 安装系统 使用fedora22-workstation-x86_64 安装opencv sudo dnf install opencv-dev ...
- opencv提取surf特征点出现的错误
opencv实现surf特征的提取.本来是一个非常easy的代码,结果我执行时却出现了各种错误,以下来谈谈我出现的错误及问题的解决过程. 首先,我把提取surf特征的过程整合成了一个函数,我单独建立一 ...
- OpenCV图像Surf与flann特征点(转载)
Surf(Speed Up Robust Feature) Surf算法的原理 ...
随机推荐
- nginx + tomcat 单个域名及多个域名的配置
//nginx + tomcat 单个域名及多个域名的配置//修改nginx的配置文件,linux默认路径 /usr/local/nginx/conf/nginx.conf //prot为8082的w ...
- git报错 error: cannot stat 'file': Permission denied
切换分支(git checkout xxx)时报错: error: cannot stat 'file': Permission denied 解决方法:退出编辑器.浏览器.资源管理器等,然后再切换就 ...
- Pandas系列(十七)-EDA(pandas-profiling)
对于探索性数据分析来说,做数据分析前需要先看一下数据的总体概况,pandas_profiling工具可以快速预览数据. 安装 pip install pandas-profiling 使用 impor ...
- Docker 与 K8S学习笔记(十 二)容器间数据共享
数据共享是volume的关键特性,今天我们来看一下通过volume实现容器与host.容器与容器之间共享数据. 一.容器与host共享数据 在上一篇中介绍到的bind mount和docker man ...
- YC-Framework版本更新:V1.0.5
分布式微服务框架:YC-Framework版本更新V1.0.5!!! 本次版本V1.0.5更新 所有模块依赖调整: 部分问题修复: Nacos模块化: Eureka模块化: 支持SOA(即WebSer ...
- 今日学习——蓝桥杯 2019年 C语言 B组
1.手淦(亲身体验,,,没啥大用,最终还是代码) 2.代码(下面是我看其他博主代码答案能看的懂的....具体的可以直接去下面的网址看) https://blog.csdn.net/qq_4452491 ...
- 搭服务器之centos-ipv6源--配置各虚拟机系统的ipv6网络安装源。
在2g内存的台式机里安装了三台虚拟机,跑起来好可以,就是swap用的比较多,图见上一篇随笔.现在平台基本有了,自己笔记本算总控,实验室台式机跑着4台机器(一实三虚),加上一台服务器,可以做很多事情了, ...
- C++普通成员函数的调用形式
#include<iostream> using namespace std; class A { public: int data; void foo(int x) { data = x ...
- Qt之QColorDialog
widget.h: #ifndef WIDGET_H #define WIDGET_H #include <QWidget> class Widget : public QWidget { ...
- golang中的sync
1. Go语言中可以使用sync.WaitGroup来实现并发任务的同步 package main import ( "fmt" "sync" ) func h ...