Linux主机上使用交叉编译移植u-boot到树莓派
0环境
Linux主机OS:Ubuntu14.04 64位,运行在wmware workstation 10虚拟机
树莓派版本:raspberry pi 2 B型.
树莓派OS: Debian Jessie Raspbian Jessie
1树莓派的启动过程
树莓派1,2,3的启动过程大致相同,主要分为3个阶段:ROM上的GPU bootloader启动GPU,GPU启动CPU,CPU直接启动内核或通过u-boot启动内核.
由于树莓派涉及到GPU的东西不开源,移植u-boot到树莓派并不是真正意义上的bootloader,但是鉴于u-boot广泛的应用,还是很有学习的必要
树莓派启动过程:
2移植u-boot到Debian Jessie系统
最初想直接移植u-boot到Raspbian,尝试了多次都失败告终.google上u-boot启动raspberry pi大都是基于Debian Jessie,所以先照葫芦画瓢试一把.
移植u-boot到树莓派参考例程
(1)最全面的RPi u-boot例程RPi U-Boot
(2)基于RPi2的例程Booting a Raspberry Pi2, with u-boot and HYP enabled
(3)基于RPi2,提供现成文件的例程Raspberry Pi 2 – Debian Jessie and U-Boot
(4)基于mainline u-boot的例程How to compile mainline u-boot for Raspberry Pi ?
MicroSD卡烧写镜像:debian jessie下载地址
Ubuntu主机上u-boot使用Mainline版本,官网源码 亚马逊下载地址
Ubuntu主机上文件位置如下
家目录(/root)下u-boot-2016.09文件夹是解压后的u-boot
家目录(/root)下script_u-boot文件夹是自己写的环境配置,脚本
u-boot-2016.09文件夹如下,可以先读读README
script_u-boot文件夹内如下图,从左到右是scr配置文件,环境配置文件,生成u-boot.bin文件,生成scr文件

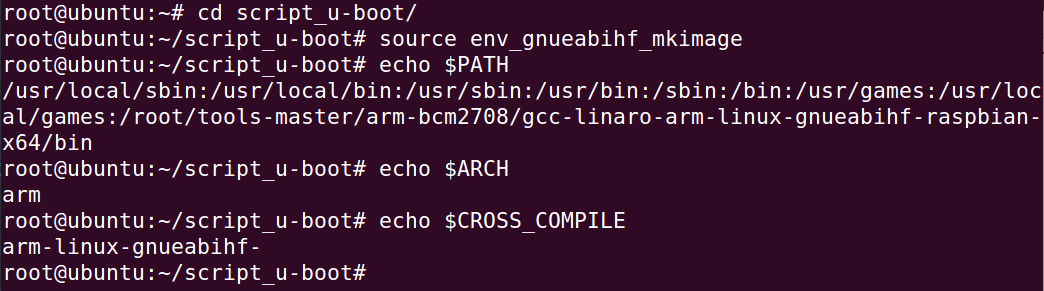
env_gnueabihf_mkimage文件代码如下
#添加树莓派的交叉编译工具链路径(主机是64位)
export PATH=$PATH:/root/tools-master/arm-bcm2708/gcc-linaro-arm-linux-gnueabihf-raspbian-x64/bin #指定编译目标架构为arm,编译器为PATH路径中的交叉编译器
export ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf-
树莓派交叉编译工具链地址https://github.com/raspberrypi/tools
树莓派交叉编译可以参考Linux主机上实现树莓派的交叉编译及文件传输,远程登陆
在后续操作之前先source一下这个文件使配置生效,关闭终端或者重新登陆Ubuntu需要再次source
用echo查看变量,注意使用tab自动补全路径
make_ubootbin文件代码如下
#从脚本文件夹切换到u-boot文件夹下
cd /root/u-boot-2016.09 #配置适用于树莓派2的u-boot
make rpi_2_defconfig #编译
make all
#返回脚本文件夹
cd /root/script_u-boot
切换路径是因为执行这个脚本是在script_u-boot文件夹,而make命令执行Makefile是在u-boot-2016.09文件夹,最后切回路径方便后续的source
这里make rpi_2_defconfig是针对树莓派2板,其它版本树莓派的make config参考前文的移植u-boot到树莓派参考例程(1)(4)
执行make_ubootbin无报错
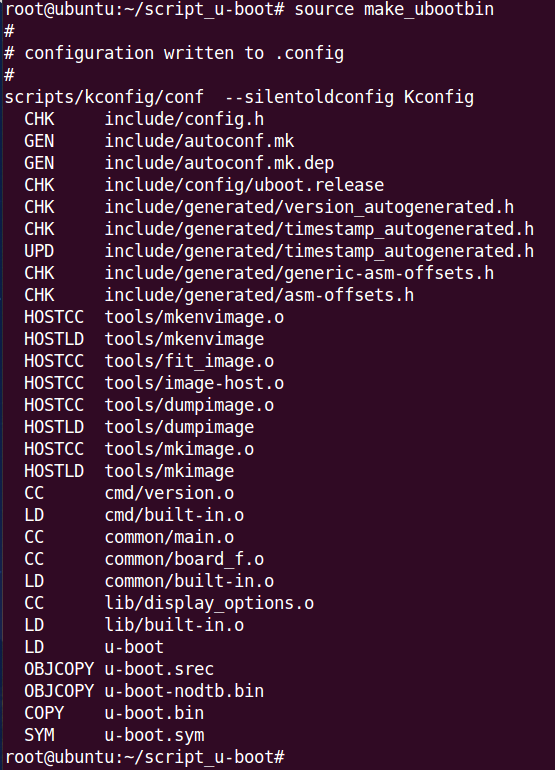
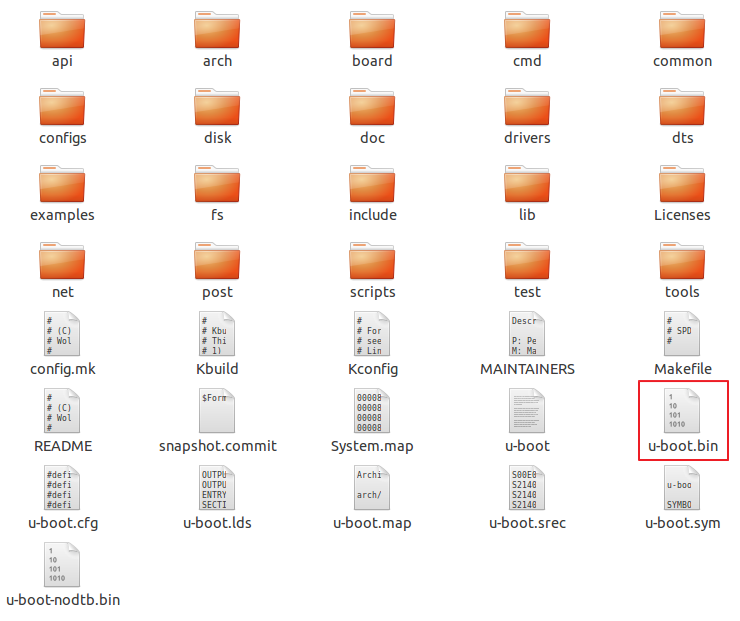
在u-boot-2016.09文件夹下生成了u-boot.bin
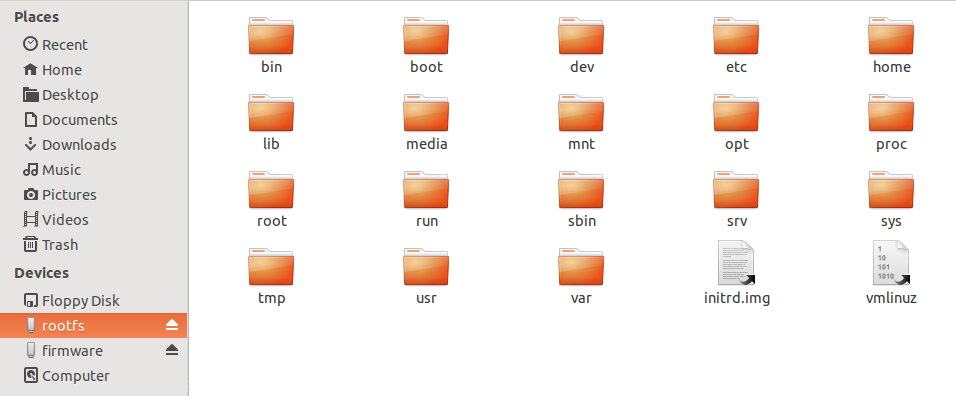
把debian jessie的SD卡通过读卡器插到电脑,注意先选中虚拟机的Ubuntu系统,Ubuntu会自动读取(mount)SD卡
rootfs(根文件系统)分区:
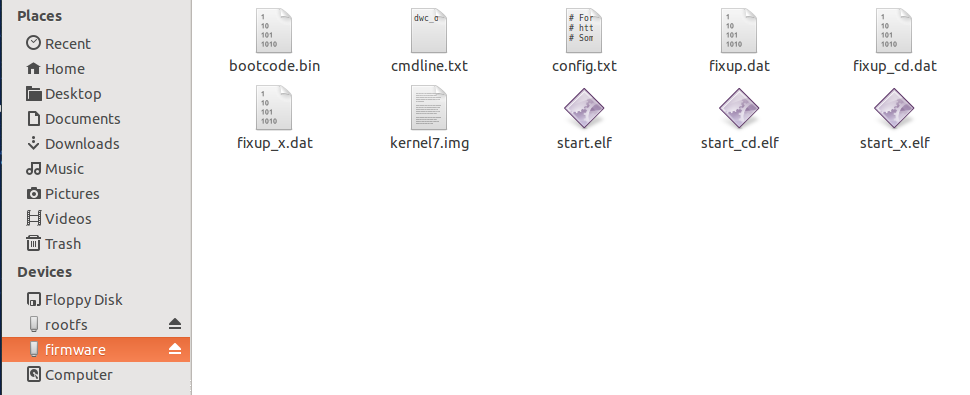
firmware(debian jessie下的启动分区):
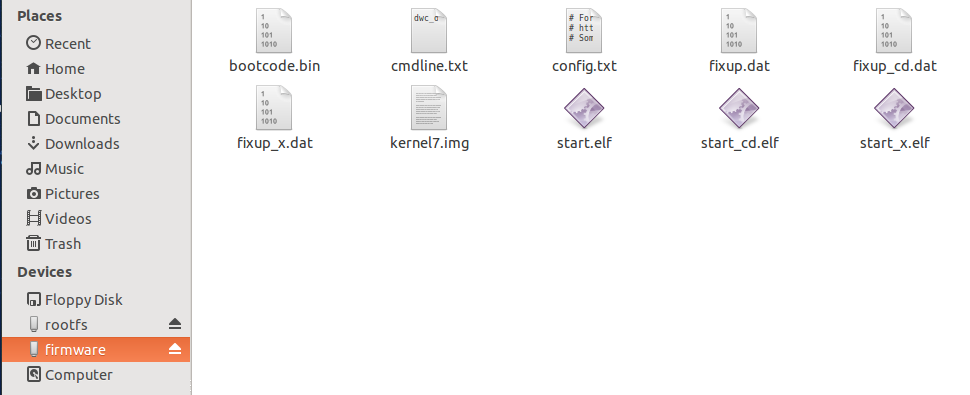
关于启动分区config.txt bootcode.bin cmdline.txt start.elf kernel7.img等文件,参考前文的树莓派启动过程
至此可以把u-boot.bin拷到sd卡的firmware(对于debian jessie系统)
然后在config.txt添加
kernel=u-boot.bin
指定用u-boot.bin启动内核kernel7,config.txt是内核的配置文件,类似电脑的BIOS配置
配置内核的方法:
一种方法是在u-boot阶段手动输入命令,而mainline版本的u-boot不支持usb输入,尝试过例程(1)中的Stephen Warren版本,也无法输入(问题还有待调查)
另一种是把u-boot中输入的命令写到一个脚本文件,通过mkimage命令将这个脚本生成.scr镜像,然后放到启动分区,u-boot会自动读取脚本来启动内核,这样更简单更容易修改,但是不利于调试错误信息
用第一种方法可以拔出SD卡,在树莓派上配置内核启动,注意在u-boot阶段只能通过HDMI外接显示屏或者串口来查看输出信息.关于串口可以参考RPi Serial Connection
用第二种方法是在Ubuntu主机上生成boot.scr镜像,先写一个配置文件:在script_u-boot文件夹下新建configure_scr_file,内容如下
#设置环境为树莓派2
setenv machid 0x00000c42
#设置打印信息,允许HDMI,允许串口,设置根文件系统路径和类型
setenv bootargs "earlyprintk console=tty0 console=ttyAMA0 root=/dev/mmcblk0p2 rootfstype=ext4 rootwait noinitrd"
#保存环境配置
saveenv
#载入内核镜像到MMC0的第一分区
fatload mmc : ${kernel_addr_r} kernel7.img
#启动内核
bootz ${kernel_addr_r}
以上命令的语法都是u-boot软件规定,关于命令的细节可以参考RPi U-Boot 官方文档U-Bootdoc
然后新建一个脚本make_ubootscr生成scr镜像,make_ubootscr内容如下
#生成boot.scr镜像文件
mkimage -A arm -O linux -T script -C none -a 0x00000000 -e 0x00000000 -n "RPi2 Boot Script" -d /path/to/script /boot/firmware/boot.scr
/path/to/script是configure_scr_file的路径,替换后如下
mkimage -A arm -O linux -T script -C none -a 0x00000000 -e 0x00000000 -n "RPi2 Boot Script" -d /root/script_u-boot/configure_scr_file /boot/firmware/boot.scr
source报错,提示未安装mkimage

命令找不到通常是未安装软件,或者没添加路径,mkimage应该是包含在u-boot软件中的,由于之前用过树莓派交叉编译工具链的经验,在u-boot-2016.09文件夹的tools文件夹找到了mkimage程序
更通用的是用find命令查找
find 查找路径 -name 文件名

看来是没有添加mkimage的路径到环境变量,只需在env_gnueabihf_mkimage添加路径然后source
env_gnueabihf_mkimage修改如下
export PATH=$PATH:/root/tools-master/arm-bcm2708/gcc-linaro-arm-linux-gnueabihf-raspbian-x64/bin:/root/u-boot-2016.09/tools export ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf-

提示路径不存在
这时就需要了解这条mkimage命令的具体含义了,参考mkimage - Generate image for U-Boot
/boot/firmware/boot.scr是生成boot.scr文件的路径,如果在树莓派上直接操作这个路径就是启动分区,但是我是在Ubuntu主机操作,SD卡是挂载到Ubuntu主机的路径被改变了
查看块设备可以用命令
lsblk
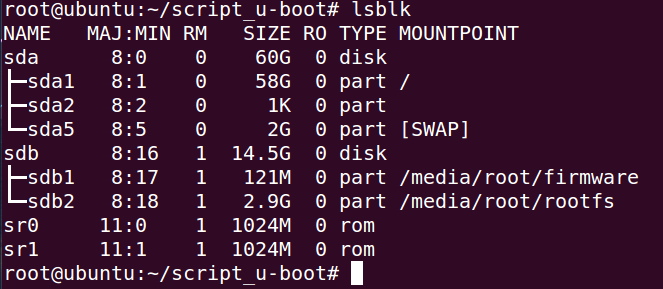
sdb就是SD卡,sdb1是firmware启动分区,sdb2是rootfs文件系统分区
事实上插入SD卡时Ubuntu自动把SD卡mount到了主机的/media路径,所以前面才能对u-boot.bin直接复制粘贴操作
但是想把SD卡的第一分区挂载到其它路径,比如主机的/mnt文件夹下,应该
mount /dev/sdb1 /mnt
注意设备的实际路径和挂载后路径的区别,/dev/xxx才是实际的设备路径
在运行原版debian jessie的树莓派2上查看SD卡挂载路径如下
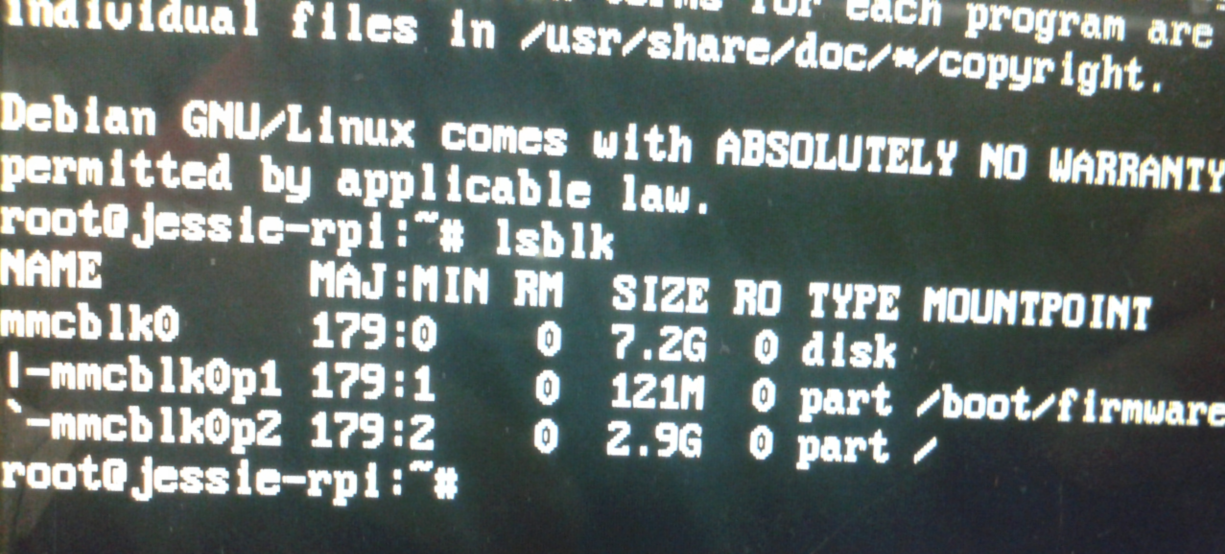
debian jessie把SD卡两个分区mmcblk0p1,mmcblk0p2分别挂载到/root和根目录
可以把boot.scr直接生成到firmware下(先在Ubuntu插好SD卡)
mkimage -A arm -O linux -T script -C none -a 0x00000000 -e 0x00000000 -n "RPi2 Boot Script" -d /root/script_u-boot/configure_scr_file /media/boot/firmware/boot.scr
更推荐生成在其它目录(比如u-boot-2016.09文件夹)再拷到SD卡,最终改为如下,-n是生成的文件名
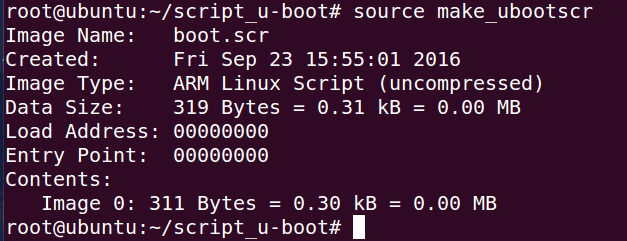
mkimage -A arm -O linux -T script -C none -a 0x00000000 -e 0x00000000 -n boot.scr -d /root/script_u-boot/configure_scr_file /root/u-boot-2016.09/boot.scr
成功生成boot.scr
在把u-boot.bin boot.scr拷到SD卡的firmware以后,确认config.txt添加了kernel=u-boot.bin就可以拔出SD卡启动树莓派2了
启动过程如下

进入登陆界面

登陆名(login):root
密码(password):debian

登录成功,至此在debian jessie上的u-boot移植完成
在主机上交叉编译生成boot.bin,也可以不添加环境变量ARCH,CROSS_COMPILE,直接在make语句指定编译器
make_ubootbin可以改为如下
cd /root/u-boot-2016.09
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- rpi_2_defconfig
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- -j4
cd /root/script_u-boot
-j4是采用四核处理器四线程编译,取决于主机CPU WIN7下查看CPU核心数
3移植u-boot到Raspbian Jessie系统
有了前面的尝试,后面的就水到渠成了.raspbian jessie我用的2015年的官网镜像,新版应该区别不大 raspbian下载
如果直接把刚才生成的u-boot.bin boot.scr拷到raspbian,在config.txt添加kernel=u-boot.bin
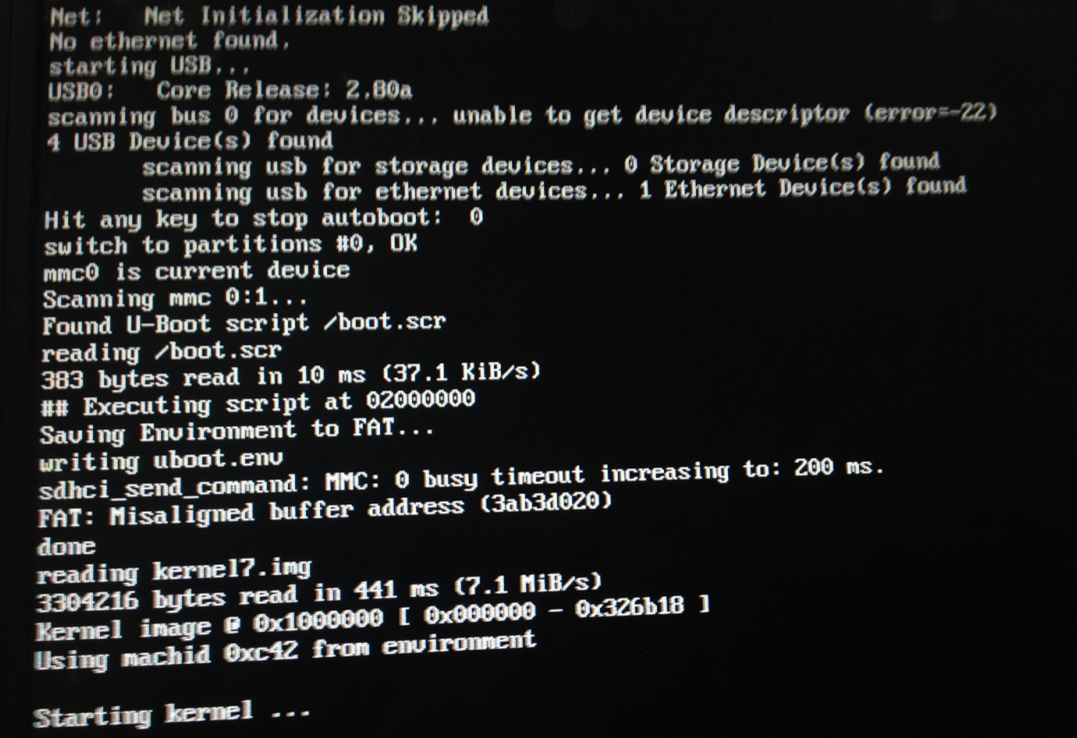
启动后停留在starting kernel...
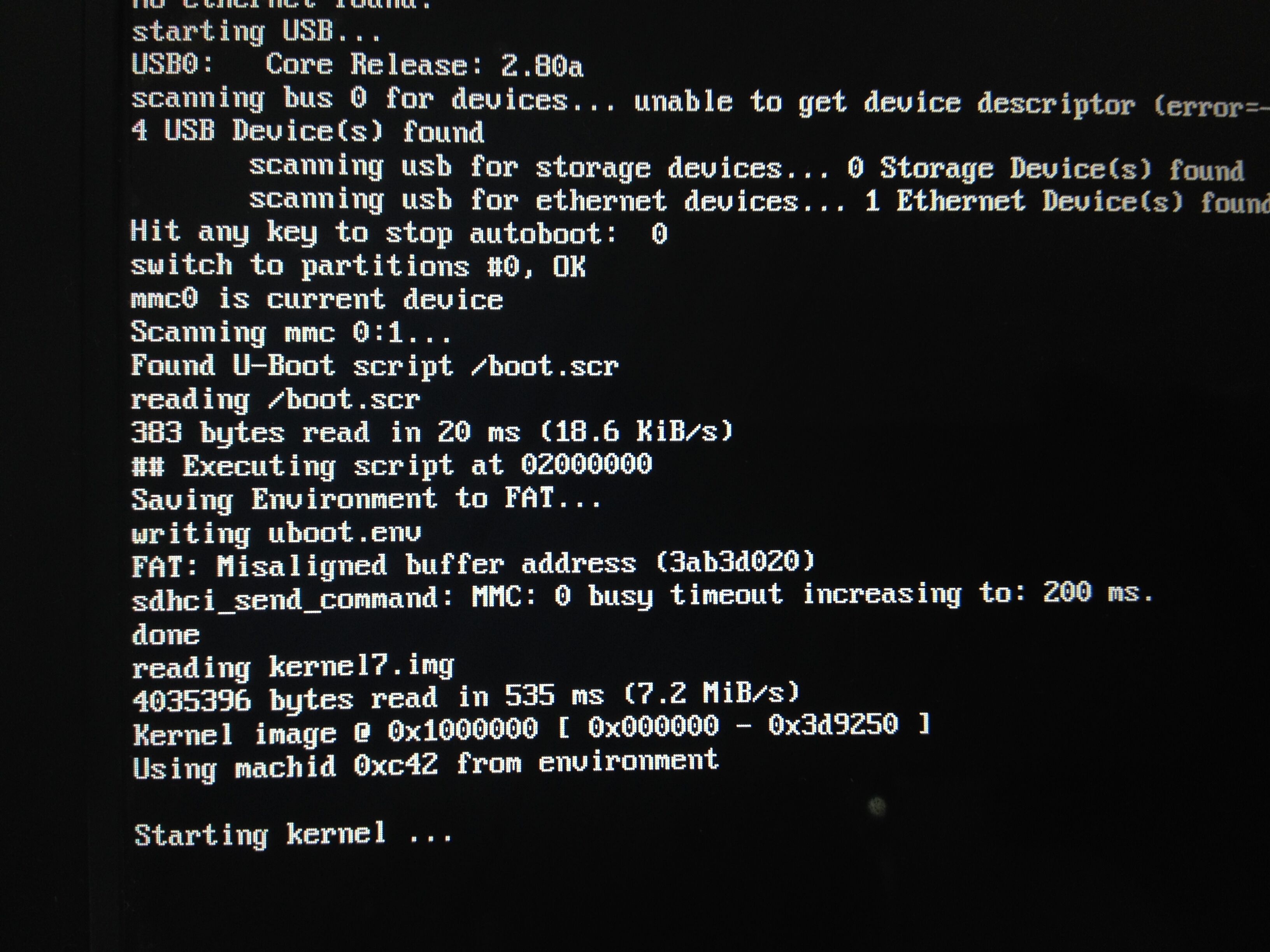
信息显示kernel7已经通过boot.scr读取了,说明问题出在启动内核之后的部分
对比一下debian jessie和raspbian jessie的分区,文件系统都一样,就是启动分区有差别
debian jessie的启动分区
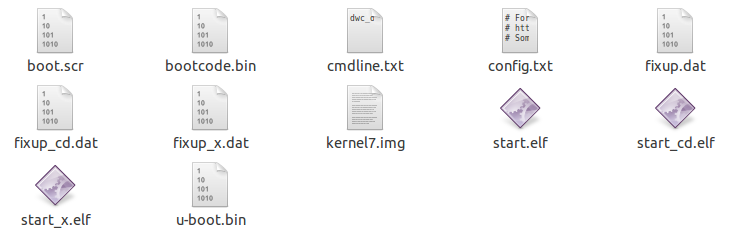
raspbian jessie的启动分区
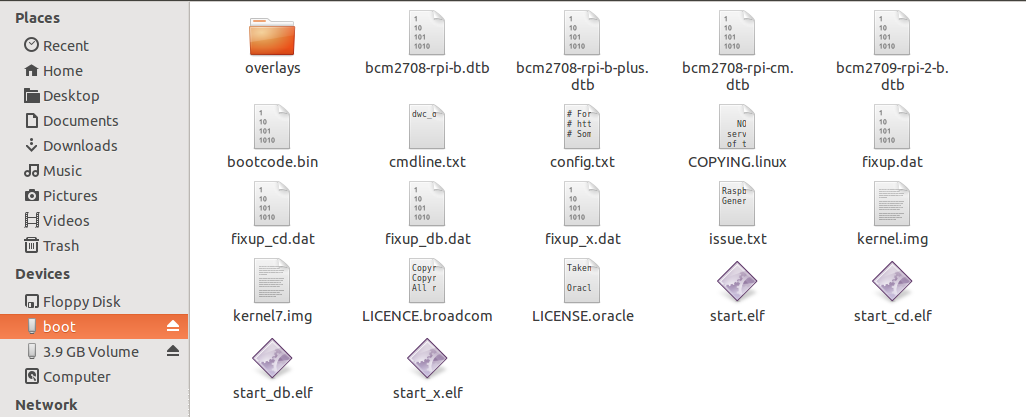
发现raspbian多了一个kernel.img,几个.dtb文件,overlay里面也是.dtb文件
参考RPi U-Boot后感觉需要加载dtb(Device Tree binary)
修改boot.scr的配置文件(configure_scr_file)的内容如下
setenv machid 0x00000c42
#添加变量fdtfile的值为bcm2709-rpi--b.dtb
setenv fdtfile bcm2709-rpi--b.dtb
setenv bootargs "earlyprintk console=tty0 console=ttyAMA0 root=/dev/mmcblk0p2 rootfstype=ext4 rootwait noinitrd"
saveenv
fatload mmc : ${kernel_addr_r} kernel7.img
#载入fdtfile的值
fatload mmc : ${fdt_addr_r} ${fdtfile}
bootz ${kernel_addr_r} - ${fdt_addr_r}
这里添加bcm2709-rpi-2-b.dtb是因为使用树莓派2,如果是其它版本酌情修改
然后source生成boot.scr
source make_ubootbin
将新的boot.scr拷到boot分区,u-boot.bin和之前完全相同,config.txt添加kernel=u-boot.bin
主机上拔出SD卡,启动树莓派
自动登录进入桌面
至此u-boot在raspbian jessie上移植完成
本文允许转载,转载请声明原文地址http://www.cnblogs.com/cursorhu/p/5896800.html
Linux主机上使用交叉编译移植u-boot到树莓派的更多相关文章
- Linux主机上实现树莓派的交叉编译及文件传输,远程登陆
0.环境 Linux主机OS:Ubuntu14.04 64位,运行在wmware workstation 10虚拟机 树莓派版本:raspberry pi 2 B型. 树莓派OS:官网下的的raspb ...
- 解决Linux主机上的 远程MySQL客户端无法连接的问题
无法连接到 MySQL 数据库可能的原因有: 1. PHP 无法连接 MySQL 可能是 PHP 配置不正确,没加上连接 MySQL 的功能. 2. MySQL 软件包升级,但没有升级数据库,或安装 ...
- 如何在linux主机上运行/调试 arm/mips架构的binary
如何在linux主机上运行/调试 arm/mips架构的binary 原文链接M4x@10.0.0.55 本文中用于展示的binary分别来自Jarvis OJ上pwn的add,typo两道题 写这篇 ...
- 通过SecureCRT向远程Linux主机上传和下载文件
有时候直接在Linux服务器上通过 wget 或 curl 工具下截比较大的网络文件时会比较慢,这时我们通常会改用在Windows平台通过迅雷等更加现代化的下载功具下好目标文件(迅雷开会员才能更高速的 ...
- FFmpeg开发笔记(十):ffmpeg在ubuntu上的交叉编译移植到海思HI35xx平台
FFmpeg和SDL开发专栏(点击传送门) 上一篇:<FFmpeg开发笔记(九):ffmpeg解码rtsp流并使用SDL同步播放>下一篇:敬请期待 前言 将ffmpeg移植到海思H ...
- Linux主机上发布java web应用
1.链接远程主机命令 ssh user@hostname 如: shh root@192.168.1.1 2.查看主机操作系统版本 uname -a 3.linux系统安装mysql a)检查是否安装 ...
- Linux学习-Linux 主机上的用户讯息传递
查询使用者: w, who, last, lastlog 如果你想要知道目前已登入在系统上面的用户呢?可以透过 w 或 who 来查询喔!如下范例所示: [root@study ~]# w 01:49 ...
- 批处理:Windows主机通过FTP下载远程Linux主机上文件
问题:在Windows上怎么写个批处理把多个文件FTP依次下载到本地某个目录. 批处理脚本示例: @echo off title Download db files. Don't close it!! ...
- 在Linux主机上搭建SVN,用于同步提交修改,实现本地提交线上预览(SVN Hook功能实现)
原文地址: http://blog.csdn.net/ROVAST/article/details/44887707?ref=myread 注:上文中钩子使用中有错误,正确的使用如下,上文中忘记了up ...
随机推荐
- .NET里简易实现AOP
.NET里简易实现AOP 前言 在MVC的过滤器章节中对于过滤器的使用就是AOP的一个实现了吧,时常在工作学习中遇到AOP对于它的运用可以说是很熟练了,就是没想过如果自己来实现的话是怎么实现的,性子比 ...
- 23种设计模式--建造者模式-Builder Pattern
一.建造模式的介绍 建造者模式就是将零件组装成一个整体,用官方一点的话来讲就是将一个复杂的构建与其表示相分离,使得同样的构建过程可以创建不同的表示.生活中比如说组装电脑,汽车等等这些都是建 ...
- SVD奇异值分解的基本原理和运用
SVD奇异值分解: SVD是一种可靠的正交矩阵分解法.可以把A矩阵分解成U,∑,VT三个矩阵相乘的形式.(Svd(A)=[U*∑*VT],A不必是方阵,U,VT必定是正交阵,S是对角阵<以奇异值 ...
- Coroutine in Java - Quasar Fiber实现--转载
转自 https://segmentfault.com/a/1190000006079389?from=groupmessage&isappinstalled=0 简介 说到协程(Corout ...
- CSS 3学习——transform 2D转换
首先声明一点,transform属性不为none的元素是它的定位子元素(绝对定位和固定定位)的包含块,而且对内创建一个新的层叠上下文. 注意:可以通过 transform-box 属性指定元素的那个盒 ...
- java设计模式之单例模式(几种写法及比较)
概念: Java中单例模式是一种常见的设计模式,单例模式的写法有好几种,这里主要介绍三种:懒汉式单例.饿汉式单例.登记式单例. 单例模式有以下特点: 1.单例类只能有一个实例. 2.单例类必须自己创建 ...
- javascript arguments(转)
什么是arguments arguments 是是JavaScript里的一个内置对象,它很古怪,也经常被人所忽视,但实际上是很重要的.所有主要的js函数库都利用了arguments对象.所以agru ...
- Android—基于微信开放平台v3SDK,开发微信支付填坑。
接触微信支付之前听说过这是一个坑,,,心里已经有了准备...我以为我没准跳坑出不来了,没有想到我填上了,调用成功之后我感觉公司所有的同事都是漂亮的,隔着北京的大雾霾我仿佛看见了太阳~~~好了,装逼结束 ...
- vim环境变量配置、背景色配置
我们使用vi或者vim的时候,如果想要显示行号,可能会这样做:切换到命令模式,然后输入set nu,再按回车键就显示了:还有就是咱们在编写程序的时候,有的时候会希望按下回车键后,光标不是每次都在行首, ...
- 用C++实现Linux中shell的ls功能
实现输出当前目录下的文件名 ls功能: 方法一: #include <iostream> #include <algorithm> #include <stdio.h&g ...