pixy&STM32使用记录(串口&SPI外设)
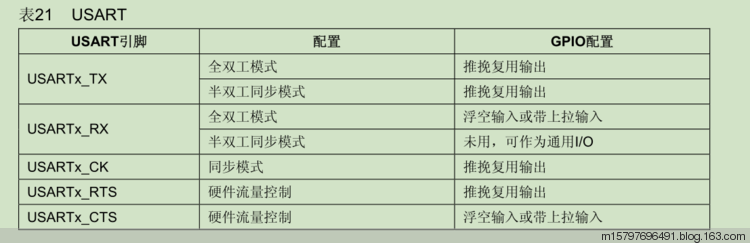


初始化串口(usart):阅读源码:
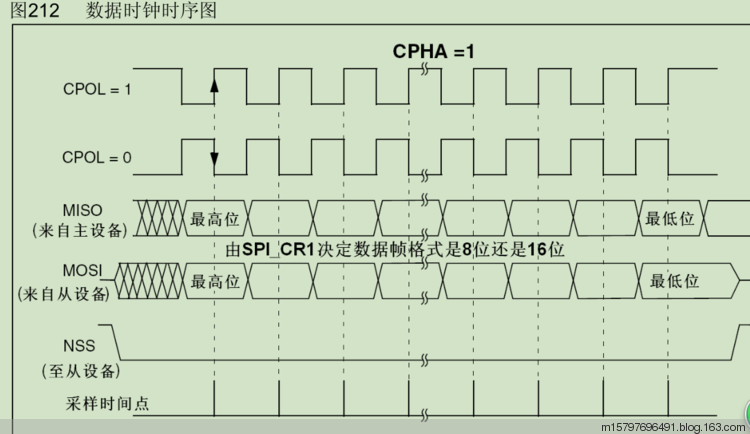
51单片机模拟SPI时序操作ds1302(软件模拟)通过时序图模拟时序,通过位于,移位读出(写入)数据,注意高低位
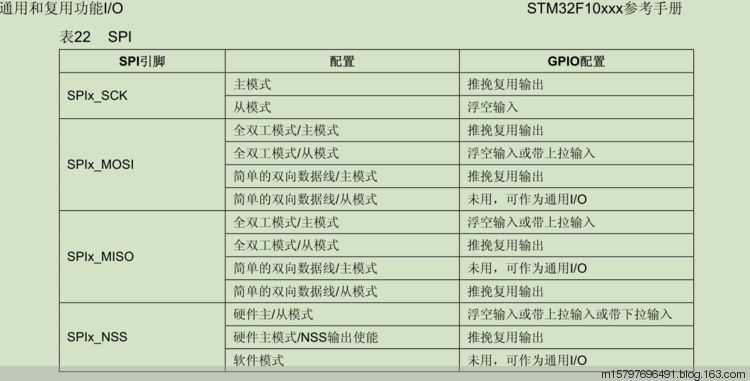
2.1:先明白Pixy的串行协议:SPI通信,在Data Out Port选项中设置:
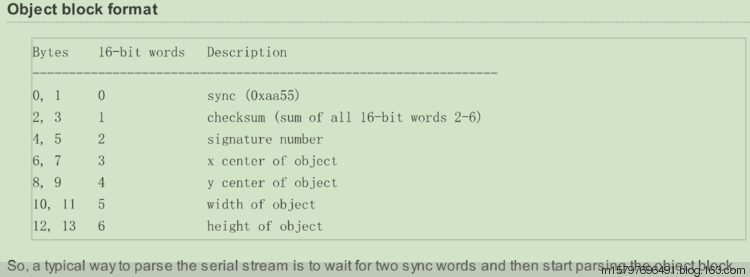
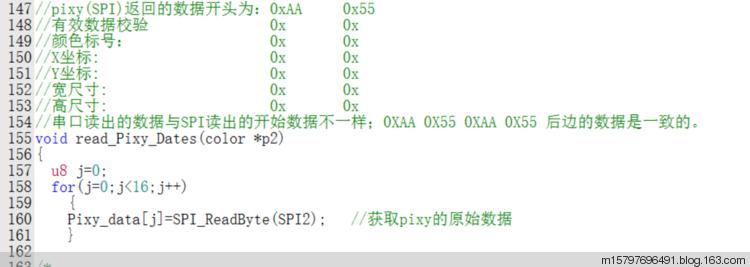
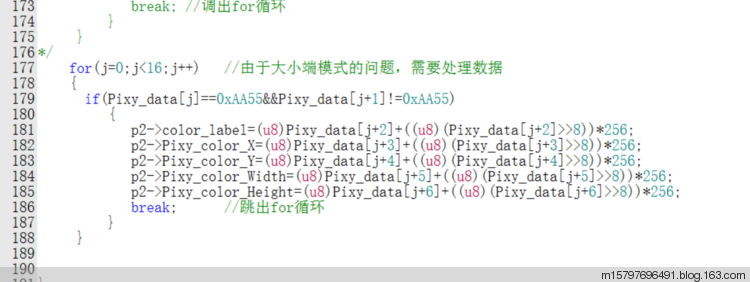
接下来用读到的pixy的数据就做你想做的事了。

pixy&STM32使用记录(串口&SPI外设)的更多相关文章
- (stm32学习总结)—spi基本原理
参考:spi详解 spi协议 SPI的基本介绍 SPI的简介 SPI,是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口,是Motorola首先在其M ...
- STM32(13)——SPI
简介: SPI,Serial Peripheral interface串行外围设备接口. 接口应用在:EEPROM, FLASH,实时时钟,AD 转换器,还有数字信号处理器和数字信号解码器之间. 特点 ...
- 使用 VSCode 给STM32配置一个串口 printf 工程
使用 VSCode 给STM32配置一个串口 printf 工程 gcc 重定向 printf 和 keil 不一样. 文件准备 先从以前的工程中拷过一份串口的代码来,然后在 main 函数中初始化串 ...
- 【STM32】使用DMA+SPI传输数据
DMA(Direct Memory Access):直接存储器访问 一些简单的动作,例如复制或发送,就可以不透过CPU,从而减轻CPU负担 由于本人使用的是正点原子开发板,部分代码取自里面的范例 本篇 ...
- STM32 USB虚拟串口(转)
源:STM32 USB虚拟串口 串口调试在项目中被使用越来越多,串口资源的紧缺也变的尤为突出.很多本本人群,更是深有体会,不准备一个USB转串口工具就没办法进行开发.本章节来简单概述STM32低端芯片 ...
- STM32学习笔记(八) SPI总线(操作外部flash)
1. SPI总线简介 SPI全称串行外设接口,是一种高速,全双工,同步的外设总线:它工作在主从方式,常规需要至少4根线才能够正常工作.SPI作为基本的外设接口,在FLASH,EPPROM和一些数字通讯 ...
- 基于STM32之UART串口通信协议(一)详解
一.前言 1.简介 写的这篇博客,是为了简单讲解一下UART通信协议,以及UART能够实现的一些功能,还有有关使用STM32CubeMX来配置芯片的一些操作,在后面我会以我使用的STM32F429开发 ...
- 嵌入式02 STM32 实验07 串口通信
STM32串口通信(F1系列包含3个USART和2个UART) 一.单片机与PC机串行通信研究目的和意义: 单片机自诞生以来以其性能稳定,价格低廉.功能强大.在智能仪器.工业装备以及日用电子消费产品中 ...
- STM32之模拟串口设计
一.设计用途: 公司PCB制成板降成本,选择的MCU比项目需求少一个串口,为满足制成板成本和项目对串口需求,选择模拟一路串口. 二.硬件电路: 三.设计实现: 工具&软件:STM32F030R ...
随机推荐
- leetcode 链表类型题目解题总结
最基础的方式要做到非常熟练,要熟练到不思考就能写,但又需明白各处的要求和陷阱 合并两个有序链表的操作,在前面加上一个初始节点,注意while循环和退出时的处理,理解如何处理其中一个链表遍历完的情况 L ...
- 【转载】SQL语句将一个表的数据写入到另一个表中
在日常的数据库运维过程中,有时候需要将Select查询出来的数据集写入到另一个数据表中,其中一种方式是通过存储过程循环写入数据,另一种简便的方式是直接使用Insert Into语句后面跟上Select ...
- C# 添加Word页眉、页脚和页码
在Word文档中,我们可以通过添加页眉.页脚的方式来丰富文档内容.添加页眉.页脚时,可以添加时间.日期.文档标题,文档引用信息.页码.内容解释.图片/LOGO等多种图文信息.同时也可根据需要调整文字或 ...
- 折腾Java设计模式之单例模式
博文原址:折腾Java设计模式之单例模式 单例模式 Ensure a class has only one instance, and provide a global point of access ...
- oppo6.0系统设备(亲测有效)激活xposed框架的流程
对于喜欢研究手机的伙伴来说,常常会用到xposed框架以及种类繁多功能强大的模块,对于5.0以下的系统版本,只要手机能获得Root权限,安装和激活xposed框架是异常简易的,但随着系统版本的不断升级 ...
- Android远程桌面助手(B1371)
Android远程桌面助手(B1371),下载:https://files.cnblogs.com/files/we-hjb/ARDC%28B1371%29.7z 1.增加了对超大分辨率4320*21 ...
- 简单易懂的单元测试框架-gtest(一)
简介 gtest是google开源的一个单元测试框架,以其简单易学的特点被广泛使用.该框架以第三方库的方式插入被测代码中.同其他单元测试框架相似,gtest也通过制作测试样例来进行代码测试.同 ...
- Keepalibed监控nginx
配置Keepalived监控nginx --wang 目的: 通过Keepalived实现对nginx的监控,每两秒扫描一次,如果nginx关闭,尝试重启nginx,两秒后检查nginx是否启动,如果 ...
- Oracle中用序列和触发器实现ID自增
在设计数据库的时候,Oracle中没有类似SQL Server中系统自动分配ID作为主键的功能,这时Oracle可以通过“序列”和“触发器”来实现ID自动增加的功能. 1.创建序列Sequence c ...
- jquery中Json操作
在开发中,我们有可能拿到的不是全的json,而是一部分json格式的数据,这个时候我们需要将其强转为json对象 第一种方法:使用jquery中的$.parseJSON(),但是它对json数据格式的 ...