arduino通信问题的学习与解决
{
Serial.begin(9600);
}
{
while (Serial.available() > 0)
{
comdata += char(Serial.read());
delay(2);
}
if (comdata.length() > 0)
{
Serial.println(comdata);
comdata = "";
}
}此代码作用就是用Serial.read()以此读入数据,然后存在comdata字符串内,之后要调用只需要comdata[x](x为你指定的整型数字)即可,但是我加进我的程序之后,发现问题并不这么简单,怎么调都出问题,在无能为力的情况下,只能重新写程序,一点一点研究走。我自己重写了一个程序,用于研究。
首先,我认为问题出在串口上面,arduino的串口一次通过一个值,如果不通过电脑给arduino输出的话,它应该会通过一个默认值。写入程序,发现这个默认值为-1

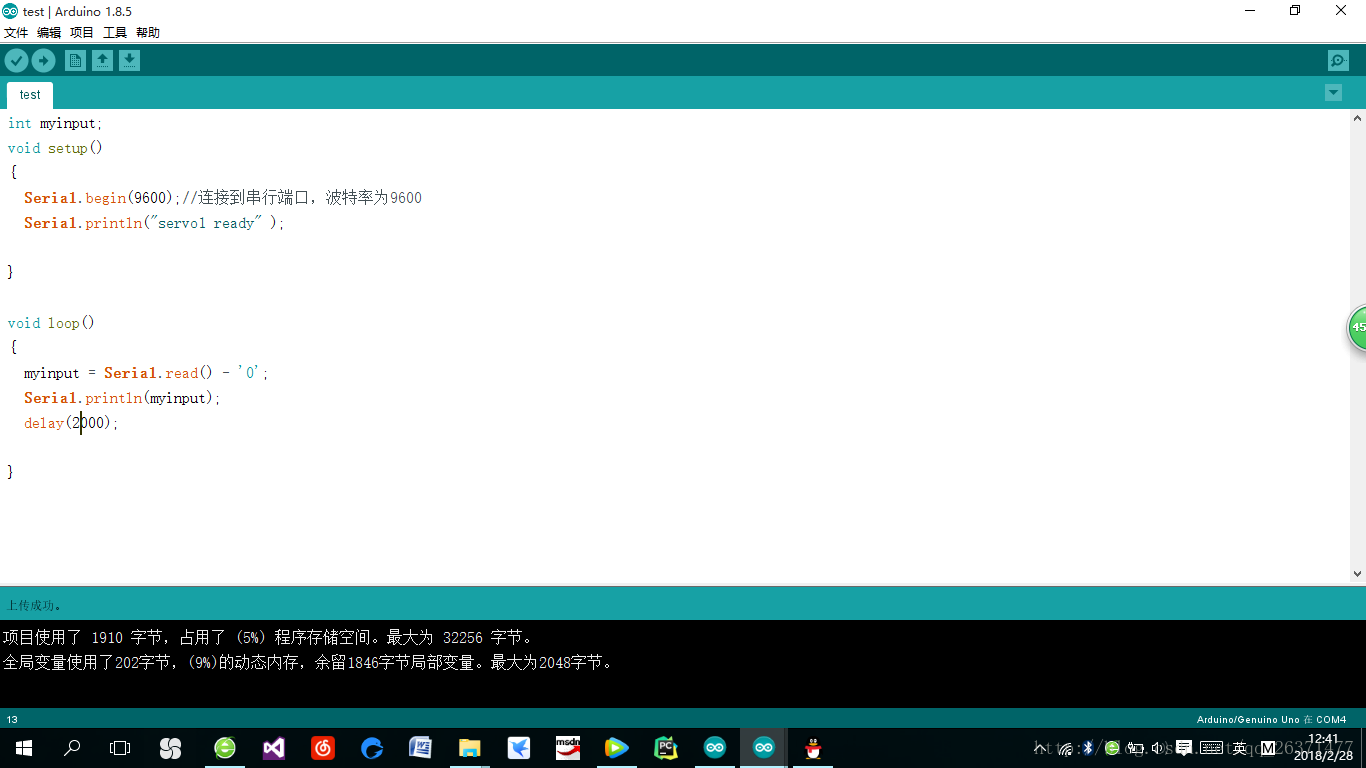
那么我们就需要一个判断语句,把这些没用的值过滤掉。if(myinput > 0)即可。这里注意,Serial.read()语句调用一次读一个字符,调用第二次就读下一个字符,所以我们需要一个临时的变量存储Serial.read()读到的值,问题是,该用什么类型定义这个变量呢?int myinput;然后 myinput = Serial.read(); 为啥?这里重要的事情说三遍:Serial.read()从电脑端读入的值强制转换成整型输出!Serial.read()从电脑端读入的值强制转换成整型输出!Serial.read()从电脑端读入的值强制转换成整型输出!但是,你从电脑端输入的是字符型;你从电脑端输入的是字符型;你从电脑端输入的是字符型;也就是说,你要输入1,myinput就是1字符的ASC2码,就是49,输入2,myinput就是整型50,输入S,返回的就是83!所以,要把myinput减一个‘0’,让他变成整形数字,这样的话,1为1,2为2,S就是35。明白了这个,之后的操作才可行。
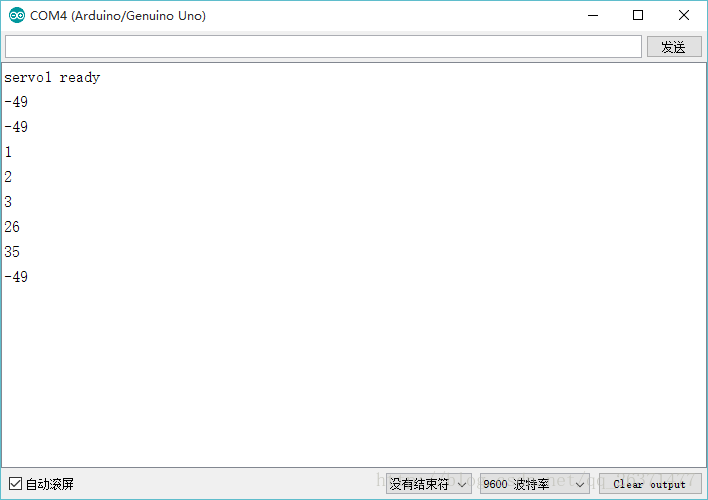
输入123JS,成功!不过串口默认值变成-4。
当然你也可以用char来处理,不过默认值就变成了不知道什么的字符,看着很难受。
解决的这个问题后,来解决下一个问题,如果我在电脑上输入两个字符LS,存进两个myinput里,但是机器怎么识别是不是有默认值混进来呢,因为电脑不传命令,就传默认值,所以到头来,我的myinput可能是-1L,或是S-1,这就不好了。没有关系,加入这段代码即可//判断输入指令 if(myinput1 > 0) { order1 = myinput1 - '0'; order2 = myinput2 - '0'; } else { order1 = myinput2 - '0'; order2 = myinput3 - '0'; }意思是,从串口里读入三个信号,然后从中依次判别各个信号是否有效(是否大于0),最后输出有效字符,存入order内,从而剔除了默认值-1。串口的问题已解决,之后的问题都迎刃而解,程序一下次就实验成功了。下面给出arduino源码//arduino环境#include <string.h>int servopinL1=9;//定义数字接口9 连接左手旋转伺服舵机信号线int servopinL2=10;//定义数字接口10 连接左手夹持伺服舵机信号线int servopinR1=8;//定义数字接口9 连接右手旋转伺服舵机信号线int servopinR2=7;//定义数字接口10 连接右手夹持伺服舵机信号线int myinput1;int myinput2;int myinput3;int order1;int order2;int myangle;//定义角度变量int pulsewidth;//定义脉宽变量int val;String comdata = "";void servopulse(int servopin,int myangle)//定义一个脉冲函数{pulsewidth=(myangle*11)+500;//将角度转化为500-2480 的脉宽值digitalWrite(servopin,HIGH);//将舵机接口电平至高delayMicroseconds(pulsewidth);//延时脉宽值的微秒数digitalWrite(servopin,LOW);//将舵机接口电平至低delay(20-pulsewidth/1000);}void setup(){ Serial.begin(9600);//连接到串行端口,波特率为9600 Serial.println("servo1 ready" ) ; Serial.println("servo2 ready" ) ; pinMode(servopinL1,OUTPUT);//设定舵机接口为输出接口 pinMode(servopinL2,OUTPUT);//设定舵机接口为输出接口 pinMode(servopinR1,OUTPUT);//设定舵机接口为输出接口 pinMode(servopinR2,OUTPUT);//设定舵机接口为输出接口}void loop(){ myinput1 = Serial.read(); myinput2 = Serial.read(); myinput3 = Serial.read(); Serial.println(myinput1); Serial.println(myinput2); Serial.println(myinput3); delay(1000); //判断输入指令 if(myinput1 > 0) if(myinput2 > '0') { order1 = myinput1 - '0'; order2 = myinput2 - '0'; } else { order1 = myinput2 - '0'; order2 = myinput3 - '0'; } if(order1 > 0 && order2 > 0) { Serial.println(order1); Serial.println(order2); if(order1 == 28) { switch (order2) { case 1: val = 0; val=val*(180/2);//将数字转化为角度 Serial.print("anticlockwise "); Serial.print(val,DEC); Serial.println(); for(int i=0;i<=50;i++) //给予舵机足够的时间让它转到指定角度 { servopulse(servopinL1,val);//引用脉冲函数 } break; case 2: val = 1; val=val*(180/2);//将数字转化为角度 Serial.print("no move "); Serial.print(val,DEC); Serial.println(); for(int i=0;i<=50;i++) //给予舵机足够的时间让它转到指定角度 { servopulse(servopinL1,val);//引用脉冲函数 } break; case 3: val = 2; val=val*(180/2);//将数字转化为角度 Serial.print("clockwise "); Serial.print(val,DEC); Serial.println(); for(int i=0;i<=50;i++) //给予舵机足够的时间让它转到指定角度 { servopulse(servopinL1,val);//引用脉冲函数 } break; case 26: //字符串'J'的ASC二码转化为整形后 - '0' val = 4; val=val*(180/9);//将数字转化为角度 Serial.print("close "); Serial.print(val,DEC); Serial.println(); for(int i=0;i<=50;i++) //给予舵机足够的时间让它转到指定角度 { servopulse(servopinL2,val);//引用脉冲函数 } break; case 35: //字符串'S'的ASC二码转化为整形后 - '0' val = 2; val=val*(180/9);//将数字转化为角度 Serial.print("open "); Serial.print(val,DEC); Serial.println(); for(int i=0;i<=50;i++) //给予舵机足够的时间让它转到指定角度 { servopulse(servopinL2,val);//引用脉冲函数 } break; } Serial.println("Good job!"); myinput1 = 0; myinput2 = 0; myinput3 = 0; order1 = 0; order2 = 0; } else if(order1 == 34) { switch (order2) { case 1: val = 0; val=val*(180/2);//将数字转化为角度 Serial.print("anticlockwise "); Serial.print(val,DEC); Serial.println(); for(int i=0;i<=50;i++) //给予舵机足够的时间让它转到指定角度 { servopulse(servopinR1,val);//引用脉冲函数 } break; case 2: val = 1; val=val*(180/2);//将数字转化为角度 Serial.print("no move "); Serial.print(val,DEC); Serial.println(); for(int i=0;i<=50;i++) //给予舵机足够的时间让它转到指定角度 { servopulse(servopinR1,val);//引用脉冲函数 } break; case 3: val = 2; val=val*(180/2);//将数字转化为角度 Serial.print("clockwise "); Serial.print(val,DEC); Serial.println(); for(int i=0;i<=50;i++) //给予舵机足够的时间让它转到指定角度 { servopulse(servopinR1,val);//引用脉冲函数 } break; case 26: //字符串'J'的ASC二码转化为整形后 - '0' val = 5; val=val*(180/9);//将数字转化为角度 Serial.print("close "); Serial.print(val,DEC); Serial.println(); for(int i=0;i<=50;i++) //给予舵机足够的时间让它转到指定角度 { servopulse(servopinR2,val);//引用脉冲函数 } break; case 35: //字符串'S'的ASC二码转化为整形后 - '0' val = 0; val=val*(180/9);//将数字转化为角度 Serial.print("open "); Serial.print(val,DEC); Serial.println(); for(int i=0;i<=50;i++) //给予舵机足够的时间让它转到指定角度 { servopulse(servopinR2,val);//引用脉冲函数 } break; } Serial.println("Good job!"); myinput1 = 0; myinput2 = 0; myinput3 = 0; order1 = 0; order2 = 0; } } }
---------------------
来源:CSDN
原文:https://blog.csdn.net/qq_26371477/article/details/79397613
arduino通信问题的学习与解决的更多相关文章
- 基于51单片机IIC通信的PCF8591学习笔记
引言 PCF8591 是单电源,低功耗8 位CMOS 数据采集器件,具有4 个模拟输入.一个输出和一个串行I2C 总线接口.3 个地址引脚A0.A1 和A2 用于编程硬件地址,允许将最多8 个器件连接 ...
- MindSpore联邦学习框架解决行业级难题
内容来源:华为开发者大会2021 HMS Core 6 AI技术论坛,主题演讲<MindSpore联邦学习框架解决隐私合规下的数据孤岛问题>. 演讲嘉宾:华为MindSpore联邦学习工程 ...
- 【IScroll深入学习】解决IScroll疑难杂症
前言 在去年,我们对IScroll的源码进行了学习,并且分离出了一段代码自己使用,在使用学习过程中发现几个致命问题: ① 光标移位 ② 文本框找不到(先让文本框获取焦点,再滑动一下,输入文字便可重现) ...
- 清晰易懂TCP通信原理解析(附demo、简易TCP通信库源码、解决沾包问题等)C#版
目录 说明 TCP与UDP通信的特点 TCP中的沾包现象 自定义应用层协议 TCPLibrary通信库介绍 Demo演示 未完成功能 源码下载 说明 我前面博客中有多篇文章讲到了.NET中的网络编程, ...
- win7下Arduino Mega 2560驱动安装失败解决办法
因为玩四轴用的apm的飞控板,而其需要安装此驱动,曾经在win8使用其,但是因为win8有相对应的数字证书保护措施(应该是这样的,因为好久了记不清楚了),以至于我每次都需要长按shift重启电脑关闭此 ...
- ORA-03113:通信通道的文件结尾解决
今天跟往常一样,登陆PL/SQL,确登陆失败,出现一个错误“ORA-01034”和“ORA-27101”如图: 然后就就通过命令提示符去登陆Oracle,去查看怎么回事,然后问题进一步出现,错误“OR ...
- PC-PC-单片机(Arduino)通信实例
请仔细理解相关参数,如端口设置.IP设置.COM口设置......等等.....不要盲目COPY.....这涉及2台电脑和一个单片机,其中一台电脑作为服务器并与单片机相连,负责通过网络与客户端通信(s ...
- 自学了三天的SeaJs学习,解决了前端的一些问题,与小伙伴们一起分享一下!
我为什么学习SeaJs? [第一]:为了解决项目中资源文件版本号的问题,以及打包压缩合并等问题. [第二]:好奇心和求知欲.[我发现很多知名网站也都在使用(qq空间, msn, 淘宝等等),而且 Se ...
- 基于51单片机IIC通信的AT24C02学习笔记
引言 最近在学习几种串行通信协议,感觉收获很多,这篇文章是学习IIC总线协议的第一篇文章,以后还会再写一篇关于PCF8591 IIC通信的ADDA转换芯片的文章. 关于IIC总线 IIC 即Inter ...
随机推荐
- OBST(最优二叉搜索树)
简述一下问题:假设有一颗词典二叉树,我们从中查找需要的单词,使用红黑树或平衡树这样的数据结构总是可以在O(lgN)时间内进行查找,但单词的出现频率是不同的,我们给每个单词加上一个搜索概率,然后通过这些 ...
- Element-UI中关于table表格的样式操作
项目中使用到element-ui组件库,经常需要操作表格,编辑样式的过程中遇到一些问题,官网针对table给出了很多的api,自己可以自定义,基本能满足产品需求,但是没有给出具体的案例,网上的资料也比 ...
- 七 MyBatis整合Spring,DAO开发(传统DAO&动态代理DAO)
整合思路: 1.SQLSessionFactory对象应该放到Spring中作为单例存在 2.传统dao开发方式中,应该从Spring容器中获得SqlSession对象 3.Mapper代理行驶中,应 ...
- onchange VS onblur
参考:https://zhidao.baidu.com/question/559052179.html
- Keras入门——(6)长短期记忆网络LSTM(三)
参考: https://blog.csdn.net/u012735708/article/details/82769711 https://zybuluo.com/hanbingtao/note/58 ...
- Linux命令:ls命令
ls命令:(list directory contents),列出目录内容 用法:ls [options] [file_or_dirs] ls命令常用选项 ls -l 显示文件的长格式信息 ls -d ...
- 富文本编辑器summernote的基本使用
summernote比较突出的优点就是能保持复制过来的东西的原有样式,并且比较流畅. 官方文档地址:https://summernote.org/getting-started 我是用到cdn引入 & ...
- BEC合约整数溢出漏洞还原与分析
一.币圈一秒,人间一年 有道是币圈一日,人间一年.这个说法又得升级了,叫币圈一秒,人间一年. 前不久,币圈又出大事啦.BEC智能合约被爆出整数溢出漏洞,导致黑客能无限印币,在一次交易中,也就那么几秒钟 ...
- C++ 标准模板库STL 队列 queue 使用方法与应用介绍
C++ 标准模板库STL 队列 queue 使用方法与应用介绍 queue queue模板类的定义在<queue>头文件中. 与stack模板类很相似,queue模板类也需要两个模板参数, ...
- php 打印格式化显示利器 <pre>
当我们PHP调试的时候,用var_dump 或 print_r打印json数据或array数组时,html页面没有换行显示,看到的内容一大堆,不好定位. 输出前添加 <pre>,便可以自动 ...