机器人操作系统——ROS,Robot Operating System
Note:偶然看到的滴滴研究院的无人驾驶竞赛,了解一下。
ROS:专为机器人软件开发所设计出来的一套电脑操作系统架构。是一个开源的元级操作系统(后操作系统),提供类似操作系统的服务,包括硬件抽象描述、底层驱动程序管理、共用功能的执行、程序间的消息传递、程序发行包管理,同时提供一些工具和库用于获取、建立、编写和执行多机融合的程序。
插曲:什么是元级操作系统呢?
ROS的首要设计目标是在机器人研发领域提高代码复用率。ROS是一种分布式处理框架(又名Nodes),使得可执行文件能被单独设计,并且在运行时松散耦合。
ROS概念,分为三个层次:
Filesystem level:
文件系统层概念就是你在碟片里遇到的资源,例如:
Packages:ROS的基本组织,可以包含任意格式文件。一个Package可以包含ROS执行时处理的文件(nodes),一个ROS的依赖库 ,一个数据集合,配置文件或一些有用的文件在一起。
Manifests:manifest.xml提供关于Package元数据,包括它的许可信息和Package之间依赖关系,以及语言特性信息像编辑旗帜(编译优化参数)。
Stacks:Stacks是Packages的集合,提供一个完整的功能,像“navigation stack” Stack与版本号关联,同时也是如何发行ROS软件方式的关键。
Manifest Stack Manifests:Stack manifes(stack.xml)提供关于Stack元数据,包括它的许可信息和Stack之间依赖关系。
Message(msg) types:信息描述,位置在路径:my_package/msg/MyMessageType.msg,定义数据类型在ROS的messages ROS里面。
Serivice(srv) types:服务描述,位置在路径:my_package/srv/MyServiceType.srv,定义这个请求和相应的数据结构在ROS service里面。
Communication level
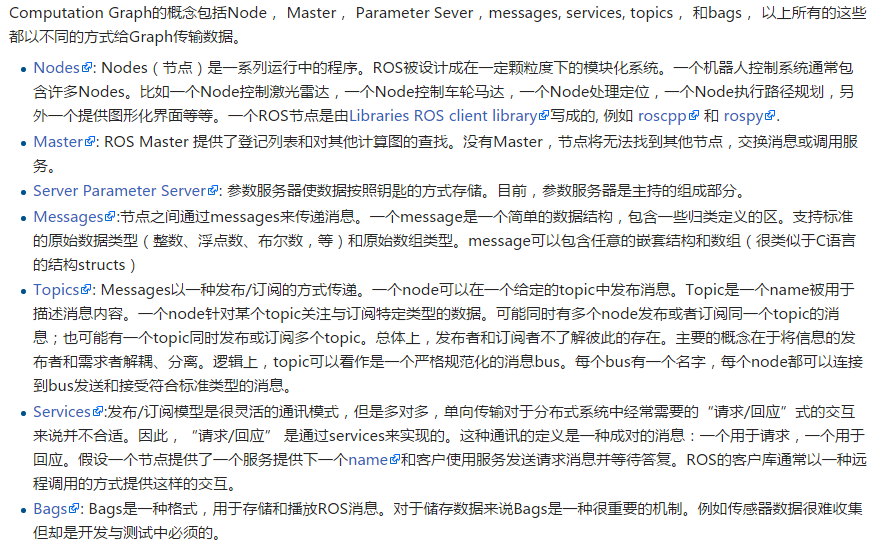
Computation Graph level:
计算图就是用ROS的P2P(peer-to-peer 网络传输协议)网络集中处理所有的数据。
机器人操作系统——ROS,Robot Operating System的更多相关文章
- 硬件模块化机器人操作系统 Hardware Robot Operating System (H-ROS)
原文网址:http://www.ros.org/news/2016/10/hardware-robot-operating-system-h-ros.html 推荐网址:https://h-ros.c ...
- ROS(Robot Operating System)常用环境变量介绍
本文简单介绍ROS系统中常用的环境变量用途及设置方式.ROS系统环境中除了必须配置的环境变量以外,其他的也是十分有用,通过修改变量路径,可以设置ROS系统中log文件存放路径,单元测试结果存放路径等. ...
- ROS (Robot Operating System) 相关资料与文档
本博文持续更新…… ROS学习与实践保护很多资料,最权威的当然是官网: www.ros.org 当然也有很多其他博文,尤其是中文文档有助于理解.2017推出一篇新博文,概况的资料较全. http:// ...
- [转]ROS(Robot Operating System)常用环境变量介绍
本文简单介绍ROS系统中常用的环境变量用途及设置方式.ROS系统环境中除了必须配置的环境变量以外,其他的也是十分有用,通过修改变量路径,可以设置ROS系统中log文件存放路径,单元测试结果存放路径等. ...
- 快速了解 Robot Operating System(ROS) 机器人操作系统
http://www.ros.org/ 关于ROS About ROS http://www.ros.org/about-ros/ 机器人操作系统(ROS)是用于编写机器人软件的灵活框架.目的在简化 ...
- ROS是Robot Operating System
ROS是Robot Operating System 机器人操作系统ROS | 简介篇 同样,从个人微信公众号Nao(ID:qRobotics)搬运. 前言 先放一个ROS Industrial一 ...
- 机器人操作系统ROS | 简介篇
同样,从个人微信公众号Nao(ID:qRobotics)搬运. 前言 先放一个ROS Industrial一周年剪辑视频. ROS已经发布八周年了,在国外科研机构中非常受欢迎.目前,以美国西南研究院为 ...
- Robot Operating System (ROS)学习笔记---创建简单的机器人模型smartcar
搭建环境:XMWare Ubuntu14.04 ROS(indigo) 转载自古月居 转载连接:http://www.guyuehome.com/243 一.创建硬件描述包 已创建catkin_ ...
- Robot Operating System (ROS)学习笔记3---键盘控制
搭建环境:XMWare Ubuntu14.04 ROS(indigo) 转载自古月居 转载连接:http://www.guyuehome.com/253 一.创建控制包 catkin_creat ...
随机推荐
- P6474 [NOI Online #2 入门组] 荆轲刺秦王
P6474 [NOI Online #2 入门组] 荆轲刺秦王 bfs+差分+卡常 本来我其实是场内选手,但是因为记错提交时间,晚了半小时才交,交不上了,就自动降级为了场外选手 题面复杂,不简述了 首 ...
- 软件——IDEA中如何去掉警告虚线
初次安装使用IDEA,总是能看到导入代码后,出现很多的波浪线,下划线和虚线,这是IDEA给我们的一些提示和警告,但是有时候我们并不需要,反而会让人看着很不爽,这里简单记录一下自己的调整方法,供其他的小 ...
- Spring官网阅读(五)BeanDefinition(下)
上篇文章已经对BeanDefinition做了一系列的介绍,这篇文章我们开始学习BeanDefinition合并的一些知识,完善我们整个BeanDefinition的体系,Spring在创建一个bea ...
- 谈谈Spring中的BeanPostProcessor接口
一.前言 这几天正在复习Spring的相关内容,在了解bean的生命周期的时候,发现其中涉及到一个特殊的接口--BeanPostProcessor接口.由于网上没有找到比较好的博客,所有最后花了好 ...
- FOC 电流采样为什么不准?你忽略了这个细节
文章目录 1 引言 2 延迟类型及典型时间 3 延迟源详细分析 3.1PWM死区时间插入 3.2 光耦延迟和预驱动器延迟 3.3晶体管开关延迟 3.4其他延迟 4 结语 在电机驱动的FOC控制开发过程 ...
- Ubuntu 配置/etc/fstab参数实现开机自动挂载硬盘
文章目录 前言 fstab 参数含义 实现步骤 1 查看硬盘信息,并找到需要进行挂载的硬盘 2 sudo mkfs.ext4 /dev/sdc 3 sudo mkdir /home/diska 4 查 ...
- c#实现生成PDF的底层方法
在用uwp生成pdf的时候,发展此类类库有限,有的也需要钱,我最后实现pdf的底层方法生成pdf,代码如下 private async void GeneratePdf() { var file = ...
- 使用JDBC操作MySQL
使用JDBC操作MySQL 步骤 加载驱动 连接数据库 操作数据库(增删改查) 关闭结果集,操作,数据库 准备工作 java连接MySQL的jar包 加载数据库驱动 public class Load ...
- linux --运行模式
运行模式也可以称之为运行级别 在Linux中存在一个进程:init (initialize:初始化)init 的进程id 是1 ps -ef | grep init 该进程存在一个对应的配置文件 in ...
- 初识spring boot maven管理--使用spring-boot-starter-parent
springboot官方推荐我们使用spring-boot-starter-parent,spring-boot-starter-parent包含了以下信息: 1.使用java6编译级别 2.使用ut ...