#ICCV2019论文阅读#Fully_convolutional_Features
一 知识背景
3D scan&cloud points(点云)patch-based features,fully convolutional network, deep metric learning, sparse tensors,sparse convolutions, hard negetive-mining, contrastive loss, triplet loss, batch normalization...
1.cloud points(点云)
“在逆向工程中通过测量仪器得到的产品外观表面的点数据集合也称之为点云,通常使用三维坐标测量机所得到的点数量比较少,点与点的间距也比较大,叫稀疏点云;而使用三维激光扫描仪或照相式扫描仪得到的点云,点数量比较大并且比较密集,叫密集点云,


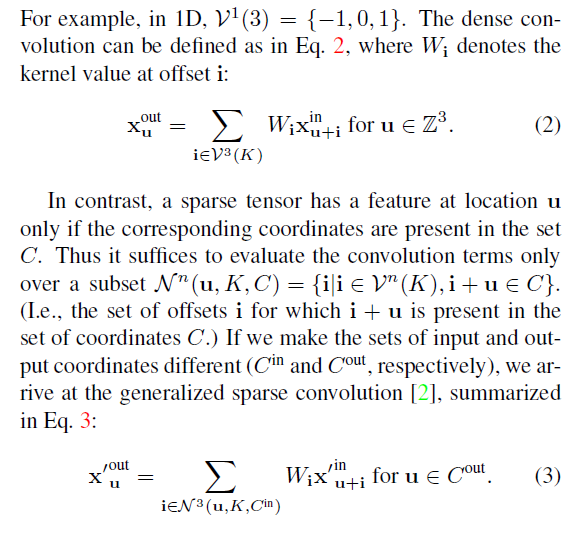
在稀疏的卷积中和权值${W}$相乘的${x}$必须在${C}$中,这样的系数卷积得到的也是一个稀疏的结果。文中的${V^(3){-1,0,1}}$我觉得其中的元素不必是固定的${{-1,0,1}}$,如果非要是这样,卷积(相关)就无法计算了(这也是我在阅读时遇到的困惑)。当然最主要的还是要在code中去实现这个系数卷积。[接下来的时间我会探索一下]。
文章正文:
从3D扫描或者是点云上提取几何特征是许多工作的第一步。例如注册(registration),重建(reconstruction)和跟踪(tracking)。现今的(state of art)方法需要将低阶(low-level)的特征作为输入来计算。
“低层次特征提取算法基于兴趣点所在表面及临近点的空间分布,提取基本的二维、三维几何属性作为兴趣点特征信息,如线性、平面性等。低层次特征提取算法复杂度低、运算效率高、内存消耗少,但领域尺寸的选择对识别效果影响较大。”
“高层次特征提取算法基于低层次几何特征及临近点空间分布,定义并计算更复杂的几何属性作为特征信息。根据几何属性的定义又可细分为基于显著性、基于直方图、基于显著性直方图与基于其他特征的四大类提取算法[1][2]。”
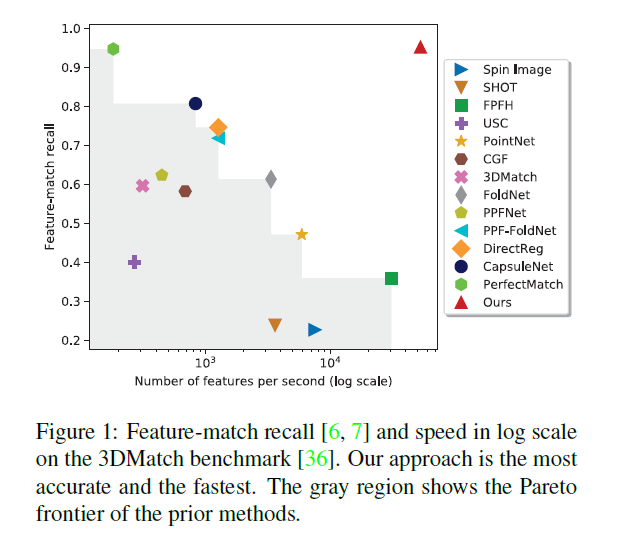
这里说明下指标:recall 中文叫查全率又叫召回率,其计算公式如下:
$recal{l_c} = \frac{{T{P_c}}}{{T{P_c} + F{N_c}}}$
意思是某一类判断正确占到该类总数的百分比。理所当然的想要提升recall可以遵循“宁可错杀一百,不可放过一人”的思想。嘿嘿~
接着我们给出作者用的网络框架:
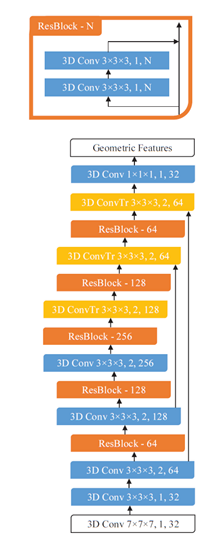
这是一个ResUNet的架构,两个白框是输入输出层,每个块用三个参数来描述:kernel size, stride, channel dimensionality.(核大小,步幅,和通道维度)除了最后一层其他的卷积层后面都有Batch normalization然后跟一个非线性(Relu).
那说了半天啥是全卷积特征啊?

全卷积特征作者说了:
我给你翻译翻译:
全卷积网络纯粹的由具有平移不变性的操作组成,像卷积和元素级别的非线性。(我不懂啥是元素级别的非线性啊?)同样,我们吧稀疏卷积网络(注这里是因为他用的稀疏卷积所以将这个网络将spase convolution network)给一个稀疏的tensor用上,我们得到的也是个稀疏的tensor,我们把这个稀疏的tensor输出叫做全卷积特征。
OK。
重头戏来了,嘿嘿~
作者自己说自己搞了个新的Metric learning的新的损失函数。在看他的新家伙式儿之前,我们不妨回顾下他站在谁的肩膀上搞了个大新闻。。
在前面的背景知识里有提到,就是negative mining 和标准的metric learning 的损失函数。这个作者说自己用全卷积网络了搞了个metric learning,而且还把negative mining整合到对比损失函数和三元组损失函数里了,他自己把整合后的这个新的损失函数叫做“Hardest contrastive"和”hardest-triplet"
网络:“我太难了(哭腔)"。
好言归正传,想要搞metric learning必须遵循两个约束,一个是类似的特征必须和彼此之间挨的足够近,对于分类来说,肯定是越近越好,那么有
$D({{f}_{i}},{{f}_{j}})\to 0\forall (i,j)\in P$
啥意思?${P}$是正确配对feature-match成功的特征,${(i,j)}$是其中的一个组合。相反的不相似的特征必然挨的越远越好,那我们就给他一个警戒线称之为margin(注:margin在英语里由差距,差额之意)用数学来说就是
$D({{f}_{i}},{{f}_{j}})>m\forall (i,j)\in N$
这里的${D}$是一种距离的衡量手段,原文没说啥距离,我觉得应该可以用欧氏距离。
文章说Lin等人说这些对于正例的约束会导致网络过拟合,然后搞出个针对正例的基于margin的损失函数。式子里右下角的+号代表着大于0时就取这个值,否则就取0。说实话,我因为一直吧这里边的${I_{ij}}$当是个示性函数,以为根据后边中括号里边的东西来取值,一直没搞懂,后来偶来见发现tm这两货是分开的。我真想吐槽这作者。。
作者的对正例加了个margin的约束后,可以解决网络过拟合的现像。
接着又弄个三元组(triplet loss)损失,我一并给出原文,瞅瞅:

在许多的文献了这篇文章后边也用了,这(4)里边的这个${f}$叫做anchor(中文名叫锚)而${f_+}$代表正例里边的元素。带负号的就不难说了。
在negative mining里边就说了,网络的性能会被小部分”人"左右,是谁呢?就是那些对于网络来说非常难啃的硬骨头——“hardest negatives"
接着作者讨论一个容易被人忽视,但却至关重要的存在:全卷积特征的特性
传统的Metric learning 认为特征是独立同分布的(iid),为啥?作者说了:

因为batch是随机采样来的。
这里需要和大家回顾下啥是epoch,batch,iteration???
- epoch:代表在整个数据集上的一次迭代(所有一切都包含在训练模型中);
- batch:是指当我们无法一次性将整个数据集输入神经网络时,将数据集分割成的一些更小的数据集批次;
- iteration:是指运行一个 epoch 所需的 batch 数。举个例子,如果我们的数据集包含 10000 张图像,批大小(batch_size)是 200,则一个 epoch 就包含 50 次迭代(10000 除以 200)。
虽说基础,但也要温故而知新嘛~
然而,然而...
在全卷积特征的提取过程中,相邻特征的位置是相关的。(我也不懂...)
#ICCV2019论文阅读#Fully_convolutional_Features的更多相关文章
- 论文阅读(Xiang Bai——【PAMI2017】An End-to-End Trainable Neural Network for Image-based Sequence Recognition and Its Application to Scene Text Recognition)
白翔的CRNN论文阅读 1. 论文题目 Xiang Bai--[PAMI2017]An End-to-End Trainable Neural Network for Image-based Seq ...
- BITED数学建模七日谈之三:怎样进行论文阅读
前两天,我和大家谈了如何阅读教材和备战数模比赛应该积累的内容,本文进入到数学建模七日谈第三天:怎样进行论文阅读. 大家也许看过大量的数学模型的书籍,学过很多相关的课程,但是若没有真刀真枪地看过论文,进 ...
- 论文阅读笔记 - YARN : Architecture of Next Generation Apache Hadoop MapReduceFramework
作者:刘旭晖 Raymond 转载请注明出处 Email:colorant at 163.com BLOG:http://blog.csdn.net/colorant/ 更多论文阅读笔记 http:/ ...
- 论文阅读笔记 - Mesos: A Platform for Fine-Grained ResourceSharing in the Data Center
作者:刘旭晖 Raymond 转载请注明出处 Email:colorant at 163.com BLOG:http://blog.csdn.net/colorant/ 更多论文阅读笔记 http:/ ...
- Deep Reinforcement Learning for Dialogue Generation 论文阅读
本文来自李纪为博士的论文 Deep Reinforcement Learning for Dialogue Generation. 1,概述 当前在闲聊机器人中的主要技术框架都是seq2seq模型.但 ...
- 论文阅读笔记 Word Embeddings A Survey
论文阅读笔记 Word Embeddings A Survey 收获 Word Embedding 的定义 dense, distributed, fixed-length word vectors, ...
- 论文阅读笔记六:FCN:Fully Convolutional Networks for Semantic Segmentation(CVPR2015)
今天来看一看一个比较经典的语义分割网络,那就是FCN,全称如题,原英文论文网址:https://people.eecs.berkeley.edu/~jonlong/long_shelhamer_fcn ...
- 论文阅读笔记 Improved Word Representation Learning with Sememes
论文阅读笔记 Improved Word Representation Learning with Sememes 一句话概括本文工作 使用词汇资源--知网--来提升词嵌入的表征能力,并提出了三种基于 ...
- 论文阅读:Prominent Object Detection and Recognition: A Saliency-based Pipeline
论文阅读:Prominent Object Detection and Recognition: A Saliency-based Pipeline 如上图所示,本文旨在解决一个问题:给定一张图像, ...
随机推荐
- 20182019-acmicpc-asia-dhaka-regional F .Path Intersection 树链剖分
直接进行树链剖分,每次对路径区间内的所有点值+1,线段树进行维护,然后查询线段树的最大值的个数!!! 查询线段树区间最大值个数,可以先维护区间和,在维护区间最值,如果区间和等于区间最值乘以区间长度,那 ...
- C++第三次作业:友元类
友元类 将数据与处理数据的函数封装在一起,构成类,即实现了数据的共享又实现了隐藏,无疑是面向程序设计的一大优点,但是封装并不总是完美的,一旦需要涉及到一个类的两个对象的数据处理问题该怎么办?无论是设计 ...
- poj 1689 && zoj 1422 3002 Rubbery (Geometry + BFS)
ZOJ :: Problems :: Show Problem 1689 -- 3002 Rubbery 这题是从校内oj的几何分类里面找到的. 题意不难,就是给出一个区域(L,W),这个区域里面有很 ...
- NIO 中文乱码自我解决的简单DEMO
import java.io.FileInputStream; import java.io.FileNotFoundException; import java.io.FileOutputStrea ...
- iptablesIP规则的保存与恢复
iptables-save把规则保存到文件中,再由目录rc.d下的脚本(/etc/rc.d/init.d/iptables)自动装载 使用命令iptables-save来保存规则.一般用 iptabl ...
- H3C 启动包过滤防火墙功能
- mybatis查询无结果, 数据库运行相同sql查询出结果
一.问题描述 mybatis查询无结果, 数据库运行相同sql查询出结果, 如下 这是数据库记录 这是mybatis查询出的结果, 记录条数0 这是直接将控制台一模一样的sql查询语句放到Navica ...
- 慎用curl测网站速度
curl的计时功能也许不够准确. curl -s -o /dev/null -w %{time_total} g.cn 耗时(秒) 0.1350.1340.1350.1350.1340.132 ab ...
- 2018-4-29-C#-将dll打包到程序中
title author date CreateTime categories C# 将dll打包到程序中 lindexi 2018-04-29 09:43:22 +0800 2018-2-13 17 ...
- js 键盘事件keyCode 总结
开发中经常页面中的某些按钮或元素需要绑定到键盘的输入事件 keydown.keyup 事件 keydown 键盘按下触发事件 $("#btn").keydown(function( ...