四旋翼基础算法学习2-IMU输入滤波算法
前言:
处理器读取陀螺仪加速度计数据后首先需要对数据进行滤波处理,此文分析比较几种常用的滤波算法。
参考学习:四轴加速度计滤波
IMU:
IMU使用MPU9250(即MPU6500),设置加速度量程±8G,陀螺仪±2000dps,数字低通滤波设置42Hz。
IMU采集频率:Crazepony 100Hz(10ms),匿名小四 1000Hz(1ms),圆点博士小四333Hz(3ms)。本次测试使用250Hz(4ms)。
在从传感器读取的原始数据滤波之前,一般需要进行零偏校准。一般陀螺仪需要上电校准零偏,加计的零偏与IMU安装有关,校准一次以后上电始终使用校准值即可(或者不予校准)。零偏校准方法基本都是水平静止放置机体多次采样取均值。
三轴加速度三轴陀螺仪原始数据 –> 减去零偏 –> 数据滤波
加速度计滤波:
滤波方法有 滑动均值滤波,2阶低通滤波
使用匿名地面站显示加速度数据波形,滤波后数据由陀螺仪通道波形显示。
ACC_X 原始加速度x轴数据
ACC_Y 原始加速度y轴数据
ACC_Z 原始加速度z轴数据
GYRO_X 滤波后加速度x轴数据
GYRO_Y 滤波后加速度x轴数据
GYRO_Z 滤波后加速度z轴数据
1.加速度计滑动均值滤波
代码:
#define SAF_NUM 10void Slide_Average_Filter(int16_t acc_x,int16_t acc_y,int16_t acc_z,int16_t *acc_out_x,int16_t *acc_out_y,int16_t *acc_out_z){static uint8_t filter_cnt=0,cnt=0;static int16_t filter_buffer[3][SAF_NUM];int32_t temp1=0,temp2=0,temp3=0;filter_buffer[0][filter_cnt]=acc_x;filter_buffer[1][filter_cnt]=acc_y;filter_buffer[2][filter_cnt]=acc_z;for(cnt=0;cnt<SAF_NUM;cnt++){temp1 += filter_buffer[0][cnt];temp2 += filter_buffer[1][cnt];temp3 += filter_buffer[2][cnt];}*acc_out_x = temp1/SAF_NUM;*acc_out_y = temp2/SAF_NUM;*acc_out_z = temp3/SAF_NUM;filter_cnt++;if(filter_cnt==SAF_NUM)filter_cnt=0;}
水平静止放置然后拍击三次桌子 下图
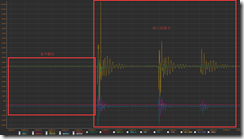
水平静止放置然后旋转晃动 下图
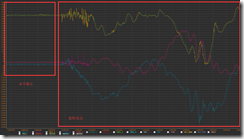
滑动滤波大体上消除了静止时的微小抖动,平滑了波形,但是能看到少许的延时。
2.加速度计2阶低通滤波
四旋翼基础算法学习2-IMU输入滤波算法的更多相关文章
- 数据挖掘算法学习(一)K-Means算法
博主近期实习開始接触数据挖掘,将学习笔记分享给大家.眼下用的软件是weka.下篇文章会着重解说. 转载请附上链接http://blog.csdn.net/iemyxie/article/details ...
- 数据挖掘算法学习(三)NaiveBayes算法
算法简单介绍 NBC是应用最广的分类算法之中的一个.朴素贝叶斯模型发源于古典数学理论,有着坚实的数学基础,以及稳定的分类效率.同一时候,NBC模型所需预计的參数非常少,对缺失数据不太敏感,算法也比較简 ...
- 数据挖掘算法学习(八)Adaboost算法
本文不定期更新.原创文章,转载请附上链接http://blog.csdn.net/iemyxie/article/details/40423907 谢谢 Adaboost是一种迭代算法,其核心思想是针 ...
- 算法学习导图+经典排序算法PHP实现
周末抽时间整理下算法,完整导图可点击下面链接获取. 点我看完整算法导图 八种排序算法的php实现 代码如下 拷贝后可直接运行 先上个运行后的图 代码:(有的自己些的 有的根据网友整理) <?ph ...
- PHP算法学习(4) 随机算法
svn地址:svn://gitee.com/zxadmin/live_z <?php /* * 随机数算法 * 伪随机数 根据分布概率 */ final class Random { /* * ...
- 第四百一十五节,python常用排序算法学习
第四百一十五节,python常用排序算法学习 常用排序 名称 复杂度 说明 备注 冒泡排序Bubble Sort O(N*N) 将待排序的元素看作是竖着排列的“气泡”,较小的元素比较轻,从而要往上浮 ...
- php四种基础排序算法的运行时间比较
/** * php四种基础排序算法的运行时间比较 * @authors Jesse (jesse152@163.com) * @date 2016-08-11 07:12:14 */ //冒泡排序法 ...
- 算法学习之C语言基础
算法学习,先熟悉一下C语言哈!!! #include <conio.h> #include<stdio.h> int main(){ printf(+); getch(); ; ...
- 第四百一十四节,python常用算法学习
本节内容 算法定义 时间复杂度 空间复杂度 常用算法实例 1.算法定义 算法(Algorithm)是指解题方案的准确而完整的描述,是一系列解决问题的清晰指令,算法代表着用系统的方法描述解决问题的策略机 ...
随机推荐
- python 和 matlab的caffe读数据细节
(1).prototxt中的输入表示一样,如 dim: 10 dim: 3 dim: 227 dim: 227 (2)代码喂入数据不一样: python: input_blob = np.ze ...
- TX2-static-dhcp-network
前言 之前是使用私有的镜像而不是按照nvidia官网中JetPack3.2套件的镜像对TX2板子进行刷机,刷机之后发现网络不能正常连接,即使已经连接了有线网口,经过大师的指点才终于明白了其中的一点点奥 ...
- 使用Git来撤销修改
首先进入一个有Git管理的文件夹下: 当我们在文件编写过程中出现了一个错误怎么办呢?如下: 但是此时你并没有将文件提交缓冲区,你可以去手动打卡文件删除这个错误. 当然你也可以查看一下状态: 发现这个文 ...
- Python之路,第十四篇:Python入门与基础14
python3 模块2 标准模块 随机模块random 假设导入 import random as R 函数: R.random() 返回一个[0 ,1) 之间的随机数 R.getr ...
- pytorch如何能够保证模型的可重复性
问题背景是这样的: 我用了自己定义了pytorch中的模型,并且,在main函数中设置了随机种子用来保证模型初始化的参数是一致的,同时pytorch中的随机种子也能够影响dropout的作用,见链接 ...
- cocos2dx九宫图使用方法
九宫格Sprite: itemBg = Scale9Sprite::create("pop/achieve_itembg.png");if(!itemBg)return false ...
- HDU - 5421:Victor and String (回文树,支持首尾插入新字符)
Sample Input 6 1 a 1 b 2 a 2 c 3 4 8 1 a 2 a 2 a 1 a 3 1 b 3 4 Sample Output 4 5 4 5 11 题意:多组输入,开始字符 ...
- 【转】visualSFM生成的bundle.rd.out文件的格式
1.bundle.out 文件包含了一些经过估算得到的场景和相机几何信息.文件的格式如下: //---------------------------------------------------- ...
- hdu1875 畅通工程再续 并查集/最小生成树
相信大家都听说一个“百岛湖”的地方吧,百岛湖的居民生活在不同的小岛中,当他们想去其他的小岛时都要通过划小船来实现.现在政府决定大力发展百岛湖,发展首先要解决的问题当然是交通问题,政府决定实现百岛湖的全 ...
- putty登陆sourceforge.net(密钥的设置)
现在直接启动putty.exe是不能登陆sourceforge.net 的.按vps的方式,输入地址.用户名和密码后,程序就自动关闭.在登入前需要安装密匙,具体做法如下: 首先得生成一个SSH Key ...