Temporal-Difference Control: SARSA and Q-Learning
SARSA
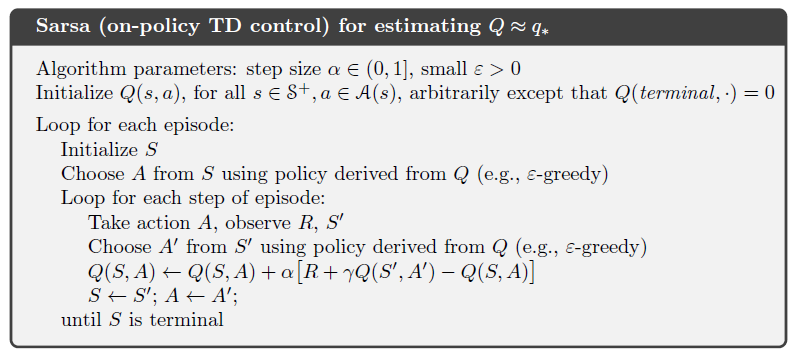
SARSA algorithm also estimate Action-Value functions rather than State-Value function. The difference between SARSA and Monte Carlo is: SARSA does not need to wait the actual return untill the end of the episode, instead it learns from each time step using estimations of the return.
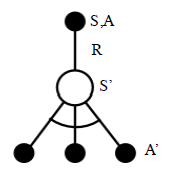
In every step, the agent takes an action A from state S, then it receives a reward R and gets to a new state S'. Based on the policy π, we know the algorithm will greedily pick the action A'. So now we have:S,A,R,S',A', and the task is to estimate Q function of S,A pair.

We borrow the idea of estimating State-Value functions and use it onto Action-Value function estimation, then we get:

Here is the Sudo code for SARSA:
On-Policy vs Off-Policy
If we look into the learning process, there are actually two steps, firstly taking an action A from state S based on policy π, geting the reward R, and the next state S' coming; the second step is using the Q-function of action A' followd the same policy π. Both of the two steps use the same policy π, but actually they can be different. On the first step, the policy is called Target Policy, which is the policy that we will update. The second policy is Behavior Policy, this is how we pick the oprimal action from S'. Q-Learning uses different Policies on the two steps.
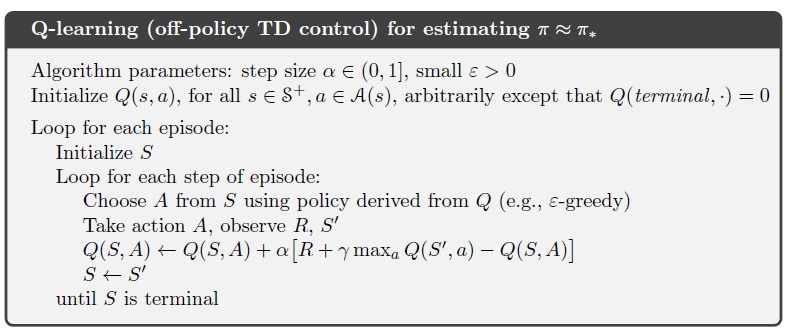
Q-Learning
From state S', Q-Learning algorithm picks the action maximizing the Q-function. It stands at state S', looking into all possible actions, and then chooses the best one.

Temporal-Difference Control: SARSA and Q-Learning的更多相关文章
- 强化学习9-Deep Q Learning
之前讲到Sarsa和Q Learning都不太适合解决大规模问题,为什么呢? 因为传统的强化学习都有一张Q表,这张Q表记录了每个状态下,每个动作的q值,但是现实问题往往极其复杂,其状态非常多,甚至是连 ...
- 增强学习(五)----- 时间差分学习(Q learning, Sarsa learning)
接下来我们回顾一下动态规划算法(DP)和蒙特卡罗方法(MC)的特点,对于动态规划算法有如下特性: 需要环境模型,即状态转移概率\(P_{sa}\) 状态值函数的估计是自举的(bootstrapping ...
- 【PPT】 Least squares temporal difference learning
最小二次方时序差分学习 原文地址: https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd= ...
- 论文笔记之:Human-level control through deep reinforcement learning
Human-level control through deep reinforcement learning Nature 2015 Google DeepMind Abstract RL 理论 在 ...
- 如何用简单例子讲解 Q - learning 的具体过程?
作者:牛阿链接:https://www.zhihu.com/question/26408259/answer/123230350来源:知乎著作权归作者所有.商业转载请联系作者获得授权,非商业转载请注明 ...
- 强化学习_Deep Q Learning(DQN)_代码解析
Deep Q Learning 使用gym的CartPole作为环境,使用QDN解决离散动作空间的问题. 一.导入需要的包和定义超参数 import tensorflow as tf import n ...
- 深度强化学习介绍 【PPT】 Human-level control through deep reinforcement learning (DQN)
这个是平时在实验室讲reinforcement learning 的时候用到PPT, 交期末作业.汇报都是一直用的这个,觉得比较不错,保存一下,也为分享,最早该PPT源于师弟汇报所做.
- The Difference between Gamification and Game-Based Learning
http://inservice.ascd.org/the-difference-between-gamification-and-game-based-learning/ Have you trie ...
- deep Q learning小笔记
1.loss 是什么 2. Q-Table的更新问题变成一个函数拟合问题,相近的状态得到相近的输出动作.如下式,通过更新参数 θθ 使Q函数逼近最优Q值 深度神经网络可以自动提取复杂特征,因此,面对高 ...
随机推荐
- c++ Socket客户端和服务端示例版本三(多线程版本)
客户端 #include <stdio.h> #include <stdlib.h> #include <errno.h> #include <sys/soc ...
- 用R语言提取数据框中日期对应年份(列表转矩阵)
用R语言提取数据框中日期对应年份(列表转矩阵) 在数据处理中常会遇到要对数据框中的时间做聚类处理,如从"%m/%d/%Y"中提取年份. 对应操作为:拆分成列表——列表转矩阵——利用 ...
- Spring基础03——Spring IOC和DI概述
1.什么是IOC与DI IOC(Inversion of Control):其思想是反转资源获取方向,传统的资源查找方式要求组件想容器发起请求查找资源,作为回应,容器适时的返回资源,而应用了IOC之后 ...
- 使用Tensorflow搭建回归预测模型之二:数据准备与预处理
前言: 在前一篇中,已经搭建好了Tensorflow环境,本文将介绍如何准备数据与预处理数据. 正文: 在机器学习中,数据是非常关键的一个环节,在模型训练前对数据进行准备也预处理是非常必要的. 一.数 ...
- python打包命令
打包成exe方法 (1)切换到该文件夹 (2)pyinstaller -F py文件 (py文件要英文才行) -F 生成单个可执行文件 -w 去掉控制台窗口 -p 自定义需要加载的类路径 -i 可执行 ...
- C Makefile初学基础
# this is make file hello.out: max.o min.o hello.c gcc max.o min.o hello.c -o hello.out max.o:max.c ...
- 配置阿里云SLB全站HTTPS集群(以下内容仅为流程,信息可能有些对应不上)
1)登录阿里云购买两台实例 1.1) 按量付费购买两台实例 1.2) 配置网络可以不选择分配外网 1.3) 自定义密码 1.4) 购买完成 1.5) 实例列表 2)购买SLB实例 2.1)按量付费购买 ...
- Spring Boot 之Profile
Profile Profile是Spring对不同环境提供不同配置功能的支持,可以通过激活.指定参数等方式快速切换环境. 1)多Profile文件 我们在主配置文件编写的时候,文件名可以是:appli ...
- 【NOIP2016提高A组8.11】自然数
题目 分析 \(O(n)\)求出mex(1,i)(1<=i<=n): 虽然0<=ai<=10^9,但只有n个数,所以mex一定小于等于n for(long long j=1;j ...
- 6364. 【NOIP2019模拟2019.9.20】养马
题目描述 题解 一种显然的水法:max(0,-(点权-边权之和*2)) 这样会挂是因为在中途体力值可能会更小,所以考虑求走完每棵子树所需的至少体力值 考虑从子树往上推求出当前点的答案 设每棵子树从根往 ...