初学STM32 CAN通信(一)
# 初学STM32 CAN通信(一)
1. CAN协议简介
CAN是控制器局域网络(Controller Area Network)的简称, 是国际上应用最广泛的现场总线之一 ,近年来,它具有的高可靠性和良好的错误检测能力受到重视,被广泛应用于汽车计算机控制系统和环境温度恶劣、电磁辐射强及振动大的工业环境。
与I2C、 SPI等具有时钟信号的同步通讯方式不同, CAN通讯并不是以时钟信号来进行同步的,它是一种异步通讯,只具有CAN_High和CAN_Low两条信号线,共同构成一组差分信号线,以差分信号的形式进行通讯。
CAN物理层的形式主要分为闭环总线及开环总线网络两种,一个适合于高速通讯,一个适合于远距离通讯。
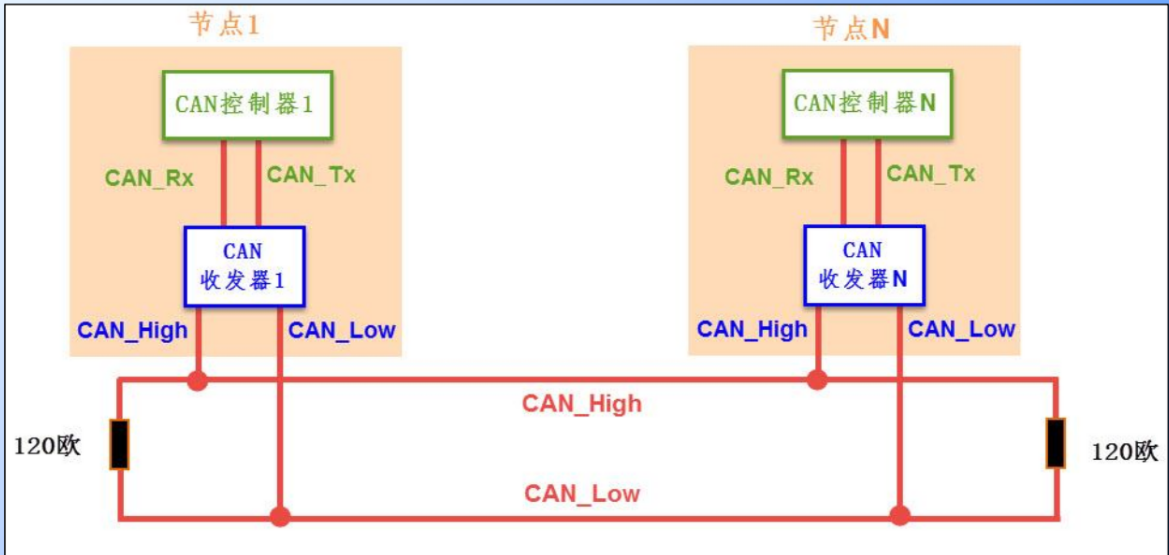
CAN总线上可以挂载多个通讯节点,节点之间的信号经过总线传输,实现节点间通讯。由于CAN通讯协议不对节点进行地址编码,而是对数据内容进行编码,所以网络中的节点个数理论上不受限制,只要总线的负载足够即可,可以通过中继器增强负载。
CAN通讯节点由一个CAN控制器及CAN收发器组成,控制器与收发器之间通过CAN_Tx及CAN_Rx信号线相连,收发器与CAN总线之间使用CAN_High及CAN_Low信号线相连。其中CAN_Tx及CAN_Rx使用普通的类似TTL逻辑信号,而CAN_High及CAN_Low是一对差分信号线,使用比较特别的差分信号。
当CAN节点需要发送数据时,控制器把要发送的二进制编码通过CAN_Tx线发送到收发器,然后由收发器把这个普通的逻辑电平信号转化成差分信号,通过差分线CAN_High和CAN_Low线输出到CAN总线网络。而通过收发器接收总线上的数据到控制器时,则是相反的过程,收发器把总线上收到的CAN_High及CAN_Low信号转化成普通的逻辑电平信号,通过CAN_Rx输出到控制器中。
2. 差分信号
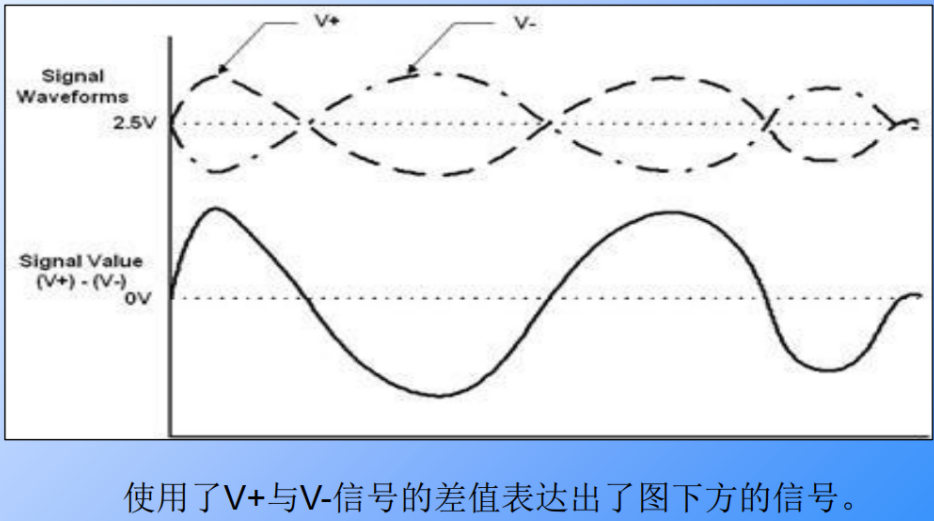
差分信号又称差模信号,与传统使用单根信号线电压表示逻辑的方式有区别,使用差分信号传输时,需要两根信号线,这两个信号线的振幅相等,相位相反,通过两根信号线的电压差值来表示逻辑0和逻辑1。
相对于单信号线传输的方式,使用差分信号传输具有如下优点:
• 抗干扰能力强,当外界存在噪声干扰时,几乎会同时耦合到两条信号线上,而接收端只关心两个信号的差值,所以外界的共模噪声可以被完全抵消。
• 能有效抑制它对外部的电磁干扰,同样的道理,由于两根信号的极性相反,他们对外辐射的电磁场可以相互抵消,耦合的越紧密,泄放到外界的电磁能量越少。
• 时序定位精确,由于差分信号的开关变化是位于两个信号的交点,而不像普通单端信号依靠高低两个阈值电压判断,因而受工艺,温度的影响小,能降低时序上的误差,同时也更适合于低幅度信号的电路。
• 由于差分信号线具有这些优点,所以在USB协议、 485协议、以太网协议及CAN协议的物理层中,都使用了差分信号传输
CAN协议中的差分信号
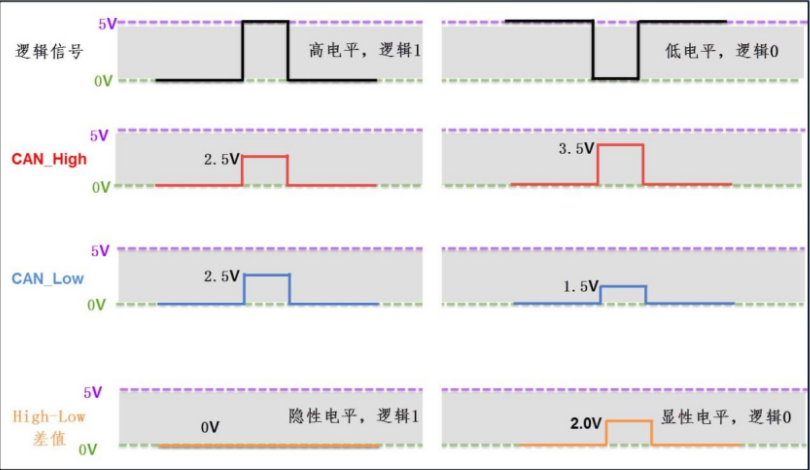
CAN协议中对它使用的CAN_High及CAN_Low表示的差分信号做了规定。以高速CAN协议为例,当表示逻辑1时(隐性电平), CAN_High和CAN_Low线上的电压均为2.5v,即它们的电压差VH - VL=0 V;而表示逻辑0时(显性电平), CAN_High的电平为3.5V, CAN_Low线的电平为1.5V,即它们的电压差为VH - VL=2 V。
3. 位时序
由于CAN属于异步通讯,没有时钟信号线,连接在同一个总线网络中的各个节点会像串口异步通讯那样,节点间使用约定好的波特率进行通讯,特别地, CAN还会使用“位同步”的方式来抗干扰、吸收误差,实现对总线电平信号进行正确的采样,确保通讯正常。
为了实现位同步, CAN协议把每一个数据位的时序分解成SS段、 PTS段、PBS1段、 PBS2段,这四段的长度加起来即为一个CAN数据位的长度。分解后最小的时间单位是Tq,而一个完整的位由8~25个Tq组成。
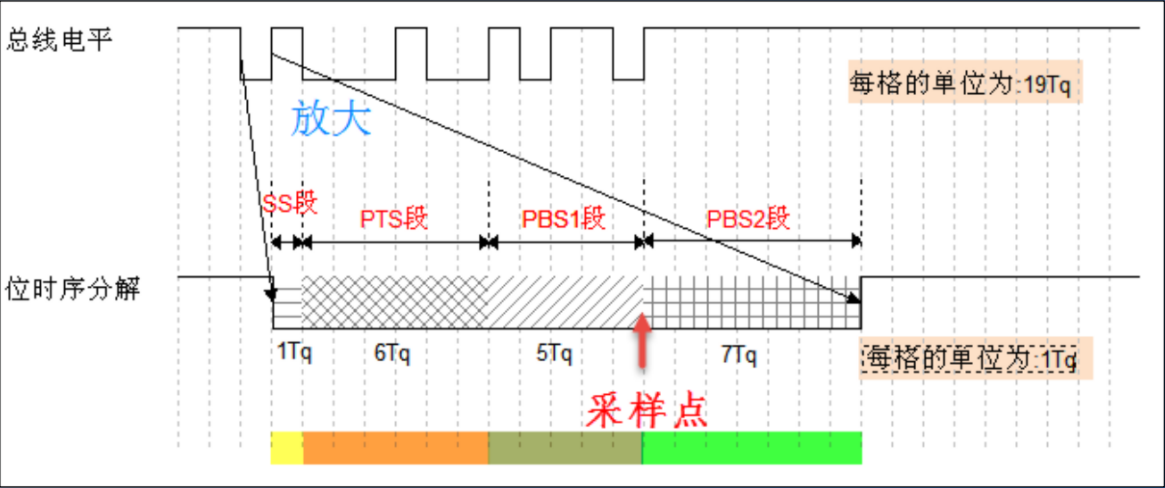
图中表示的CAN通讯信号每一个数据位的长度为19 Tq,其中SS段占1 Tq,PTS段占6 Tq, PBS1段占5 Tq, PBS2段占7 Tq。信号的采样点位于PBS1段与PBS2段之间,通过控制各段的长度,可以对采样点的位置进行偏移,以便准确地采样 。
• SS段(SYNC SEG)
SS译为同步段,若通讯节点检测到总线上信号的跳变沿被包含在SS段的范围之内,则表示节点与总线的时序是同步的,当节点与总线同步时,采样点采集到的总线电平即可被确定为该位的电平。 SS段的大小固定为1 Tq。
• PTS段(PROP SEG)
PTS译为传播时间段,这个时间段是用于补偿网络的物理延时时间。是总线上输入比较器延时和输出驱动器延时总和的两倍。 PTS段的大小可以为1~8 Tq。
• PBS1段(PHASE SEG1),
PBS1译为相位缓冲段,主要用来补偿边沿阶段的误差,它的时间长度在重新同步的时候可以加长。 PBS1段的初始大小可以为1~8 Tq。
• PBS1段(PHASE SEG1),
PBS1译为相位缓冲段,主要用来补偿边沿阶段的误差,它的时间长度在重新同步的时候可以加长。 PBS1段的初始大小可以为1~8 Tq。
4. CAN的报文种类及结构
报文的种类
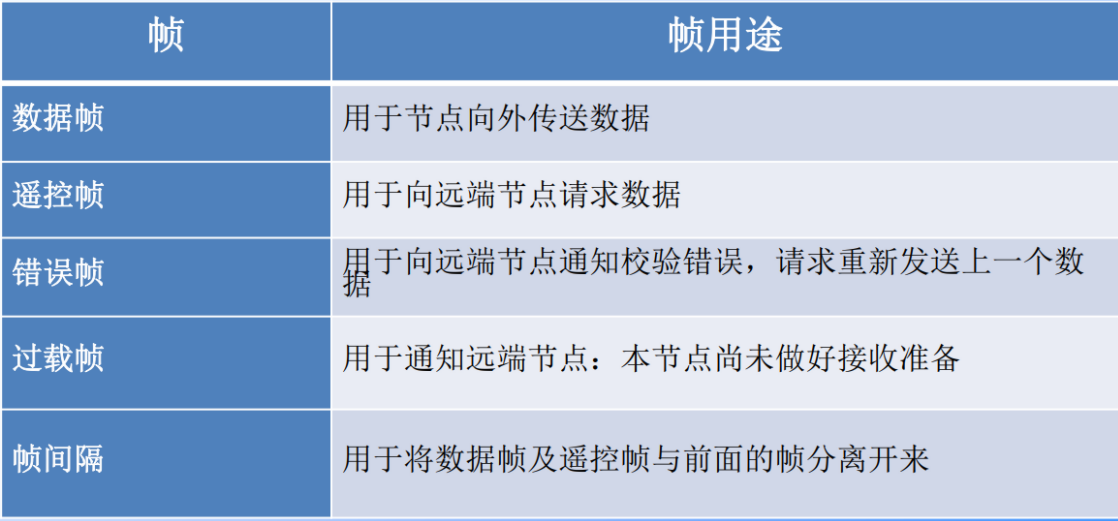
数据帧的结构图 :
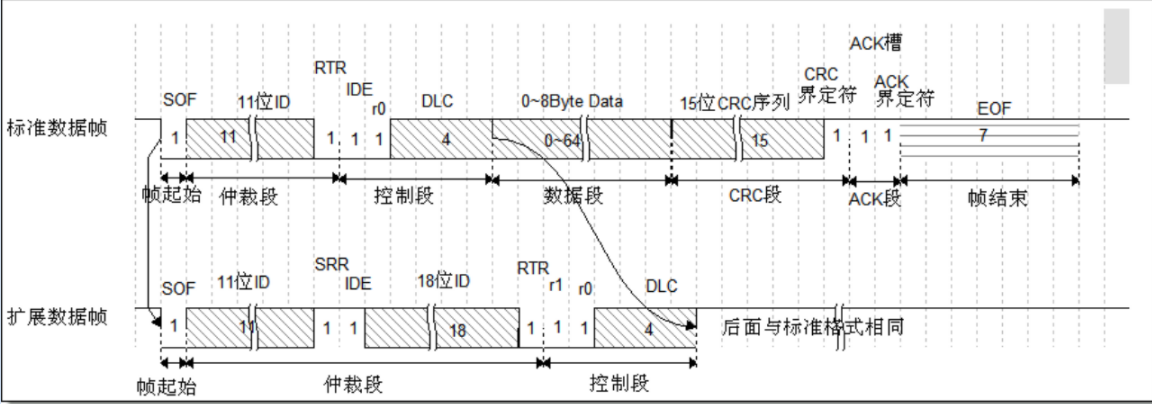
数据帧以一个显性位(逻辑0)开始,以7个连续的隐性位(逻辑1)结束,在它们之间,分别有仲裁段、控制段、数据段、 CRC段和ACK段 。
• 帧起始
SOF段(Start Of Frame),译为帧起始, 帧起始信号只有一个数据位,是一个显性电平,它用于通知各个节点将有数据传输,其它节点通过帧起始信号的电平跳变沿来进行硬同步
• 仲裁段
当同时有两个报文被发送时,总线会根据仲裁段的内容决定哪个数据包能被传输,仲裁段的内容主要为本数据帧的ID信息(标识符),数据帧具有标准格式和扩展格式两种,区别就在于ID信息的长度,标准格式的ID为11位,扩展格式的ID为29位,它在标准ID的基础上多出18位。
RTR位 (Remote Transmission Request Bit),译作远程传输请求位,它是用于区分数据帧和遥控帧的,当它为显性电平时表示数据帧,隐性电平时表示遥控帧。
IDE位(Identifier Extension Bit),译作标识符扩展位,它是用于区分标准格式与扩展格式,当它为显性电平时表示标准格式,隐性电平时表示扩展格式。
SRR位(Substitute Remote Request Bit),只存在于扩展格式,它用于替代标准格式中的RTR位。由于扩展帧中的SRR位为隐性位, RTR在数据帧为显性位,所以在两个ID相同的标准格式报文与扩展格式报文中,标准格式的优先级较高。
• 控制段
在控制段中的r1和r0为保留位,默认设置为显性位。它最主要的是DLC段(DataLength Code),译为数据长度码,它由4个数据位组成,用于表示本报文中的数据段含有多少个字节, DLC段表示的数字为0~8。
• 数据段
数据段为数据帧的核心内容,它是节点要发送的原始信息,由0~8个字节组成,MSB先行。
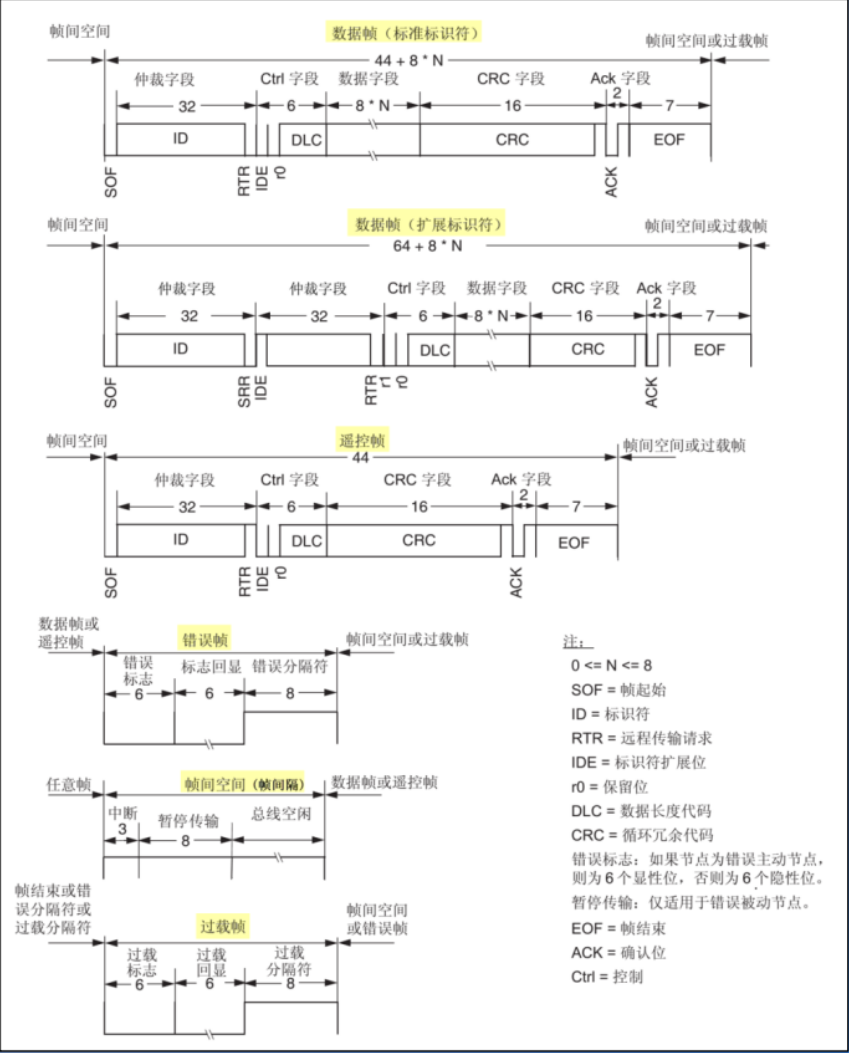
• CRC段
为了保证报文的正确传输, CAN的报文包含了一段15位的CRC校验码一旦接收节点算出的CRC码跟接收到的CRC码不同,则它会向发送节点反馈出错信息,利用错误帧请求它重新发送。 CRC部分的计算一般由CAN控制器硬件完成,出错时的处理则由软件控制最大重发数。在CRC校验码之后,有一个CRC界定符,它为隐性位,主要作用是把CRC校验码与后面的ACK段间隔起来。
• ACK段
ACK段包括一个ACK槽位和ACK界定符位。类似I2C总线,在ACK槽位中,发送节点发送的是隐性位,而接收节点则在这一位中发送显性位以示应答。在ACK槽和帧结束之间由ACK界定符间隔开。
• 帧结束
EOF段(End Of Frame),译为帧结束,帧结束段由发送节点发送的7个隐性位表示结束。
其他报文:
初学STM32 CAN通信(一)的更多相关文章
- Stm32串口通信(USART)
Stm32串口通信(UART) 串口通信的分类 串口通信三种传递方式 串口通信的通信方式 串行通信的方式: 异步通信:它用一个起始位表示字符的开始,用停止位表示字符的结束.其每帧的格式如下: 在一帧格 ...
- STM32 串口通信使用奇偶校验
STM32串口通信如果使用奇偶校验,需要设置数据位长度为9bit USART_InitStructure.USART_BaudRate = 9600; USART_InitStructure.USAR ...
- STM32串口通信UART使用
STM32串口通信UART使用 uart使用的过程为: 1. 使能GPIO口和UART对应的总线时钟 2. 配置GPIO口的输出模式 3. 配置uart口相关的基本信息 4. 使能uart口的相关的中 ...
- STM32 USB-HID通信移植步骤
大家可以使用压缩包中的UsbApp.exe调试本软件idVendor为:0483 idProduct为5750. 今天太晚了,明天还要上半天班,上位机软件找个时间在写一篇文章.请关注我的博客.压缩包 ...
- stm32串口通信实验,一点笔记
第一次深入学习stm32,花了好长时间才看懂代码(主要是C语言学习不够深入),又花了段时间自己敲了一遍,然后比对教程,了解了利用中断来串口通信的设置方法. 板子是探索版f407,本实验工程把正点原子库 ...
- stm32之通信
本文提到的内容有以下几个方面: 通信概述 串口通信 I2C通信 CAN通信 SPI通信 I2S通信 USB通信 其他通信 一.通信概述 按照数据传送方式分: 串行通信(一条数据线.适合远距离传输.控制 ...
- STM32 CAN通信
最近在STM32上开发CAN通信相关内容,转载一篇个人认为不错的文章,看完了基本算明白了,能够实际操作了. 原文地址: https://blog.csdn.net/ludaoyi88/article ...
- STM32串口通信配置(USART1+USART2+USART3+UART4) (转)
一.串口一的配置(初始化+中断配置+中断接收函数) 1 /*====================================================================== ...
- STM32串口通信USART1转USART2问题解决
使用的是STM32f103ZET6. 1.把文件main.c和usart.c中的所有usart1换成usart2 2.查看手册得知USART2的引脚是Tx->PA2,Rx->PA3,改变u ...
- 半吊子的STM32 — SPI通信
全双工,同步串行通信. 一般需要三条线通信: MOSI 主设备发送,从设备接收 MISO 主设备接收,从设备发送 SCLK 时钟线 多设备时,多线选取从机: 传输过程中,主从机中的移位寄存器中数据相互 ...
随机推荐
- 通过performance_schema获取造成死锁的事务语句(转)
数据库日常维护中我们经常遇到死锁的问题,由于无法获取造成死锁的事务内执行过的语句,对我们死锁的分析造成很大的困难.但是在MySQL 5.7中我们可以利用performance_schema来获取这些语 ...
- Springboot中如何使用日志框架logback和log4j2?
说明 在这个简短的教程中,我们将探索 Spring Boot 中可用的主要日志记录选项:logback和log4j2 初始设置 使用 starters 时,默认使用 Logback 进行日志记录. 让 ...
- Spring Boot图书管理系统项目实战-3.用户登录
导航: pre: 2.项目搭建 next:4.基础信息管理 只挑重点的讲,具体的请看项目源码. 1.项目源码 需要源码的朋友,请捐赠任意金额后留下邮箱发送:) 2.登录页设计 <!DOCTYP ...
- letcode-Z字抖动
题目 将一个给定字符串 s 根据给定的行数 numRows ,以从上往下.从左到右进行 Z 字形排列. 比如输入字符串为 "PAYPALISHIRING" 行数为 3 时,排列如下 ...
- 【LeetCode二叉树#00】二叉树的基础知识
基础知识 分类 满二叉树 如果二叉树中除了叶子结点,每个结点的度都为 2,则此二叉树称为满二叉树. 完全二叉树 除了底层外,其他部分是满的,且底层从左到右是连续的,称为完全二叉树 满二叉树一定是完全二 ...
- 【Azure Fabric Service】怎样关闭 Azure Service Fabric?
问题描述 怎样关闭Azure Service Fabric服务呢?在Azure门户上没有找到 Stop 按钮. 问题回答 Azure Service Fabric 默认是无法停止的,可以删除. 虽然可 ...
- Sliver C2通关渗透攻击红队内网域靶场2.0
准备 2012 server 第一台机器开机后,要在C:\Oracle\Middleware\Oracle_Home\user_projects\domains\base_domain手动运行下 s ...
- WOX 和 everything 差不多,挺不错也
WOX 和 everything 差不多,挺不错也
- 定义pod的hosts文件(HostAliases)
通过HostAliases 向 Pod /etc/hosts 文件添加条目 当 DNS 配置以及其它选项不合理的时候,通过向 Pod 的 /etc/hosts 文件中添加条目, 可以在 Pod 级别覆 ...
- day32-JQuery05
jQuery05 9.作业 9.1homework01 对多选框进行操作,输出选中的多选框的个数,并且把选中爱好的名称显示. <!DOCTYPE html> <html lang=& ...