CKS 考试题整理 (03)-kube-bench 修复不安全项
Context
针对 kubeadm 创建的 cluster 运行 CIS 基准测试工具时,发现了多个必须立即解决的问题。
Task
通过配置修复所有问题并重新启动受影响的组件以确保新的设置生效。
修复只对 API 服务器发现的所有以下违规行为:
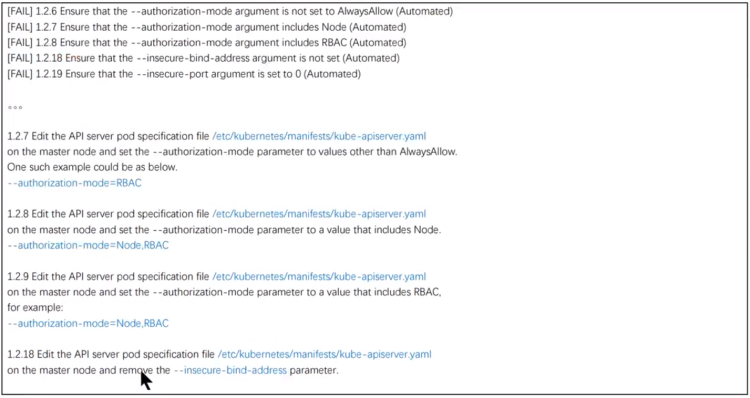
1.2.7 Ensure that the --authiruzatuib-mode argument is not set to AlwaysAllow FAIL
1.2.8 Ensure that the --authiruzatuib-mode argument includes Node FAIL
1.2.9 Ensure that the --authiruzatuib-mode argument includes RBAC FAIL
1.2.18 Ensure that the --insecure-bind-address argument is not set FAIL (1.25中这项题目没给出)
1.2.19 Ensure that the --insecure-port argument is set to 0 FAIL (1.25中这项题没给出,不需要再修改了)
修复针对 kubelet 发现的所有以下违规行为:
Fix all of the following violations that were found against the kubelet:
4.2.1 Ensure that the anonymous-auth argument is set to false FAIL
4.2.2 Ensure that the --authorization-mode argument is not set to AlwaysAllow FAIL
注意:尽可能使用Webhook身份验证/授权。
修复针对 etcd 发现的所有以下违规行为:
Fix all of the following violations that were found against etcd:
2.2 Ensure that the --client-cert-auth argument is set to true FAIL
参考资料
https://kubernetes.io/zh-cn/docs/reference/config-api/kubelet-config.v1beta1/
答题
考试时务必执行,切换集群。
kubectl config use-context KSCS00201
1. 切换到master的root下
ssh master01 && sudo -i
2. 修改 api-server
# 可以使用这条命令查
kube-bench master
查出来的,可能很多不安全项,但只修改考题要求的那几项即可。
修改之前,备份下配置文件。
mkdir bak01
cp /etc/kubernetes/manifests/kube-apiserver.yaml bak01/
vim /etc/kubernetes/manifests/kube-apiserver.yaml
# 修改、添加、删除相关内容
# 修改 authorization-mode,注意 Node 和 RBAC 之间的符号是英文状态的逗号,尔不是点。
--authorization-mode=Node,RBAC
# 删除insecure-bind-address, 考试中可能没有这项
--insecure-bind-address=0.0.0.0
3. 修改 kubelet
# 可以使用这条命令查询
kube-bench node

systemctl status kubelet

cat /etc/systemd/system/kubelet.service.d/10-kubeadm.conf 中你会看到 Environment="KUBELET_CONFIG_ARGS=--config=/var/lib/kubelet/config.yaml"。
修改这个文件之前先备份一下。
cp /var/lib/kubelet/config.yaml bak01/
vim /var/lib/kubelet/config.yaml
修改
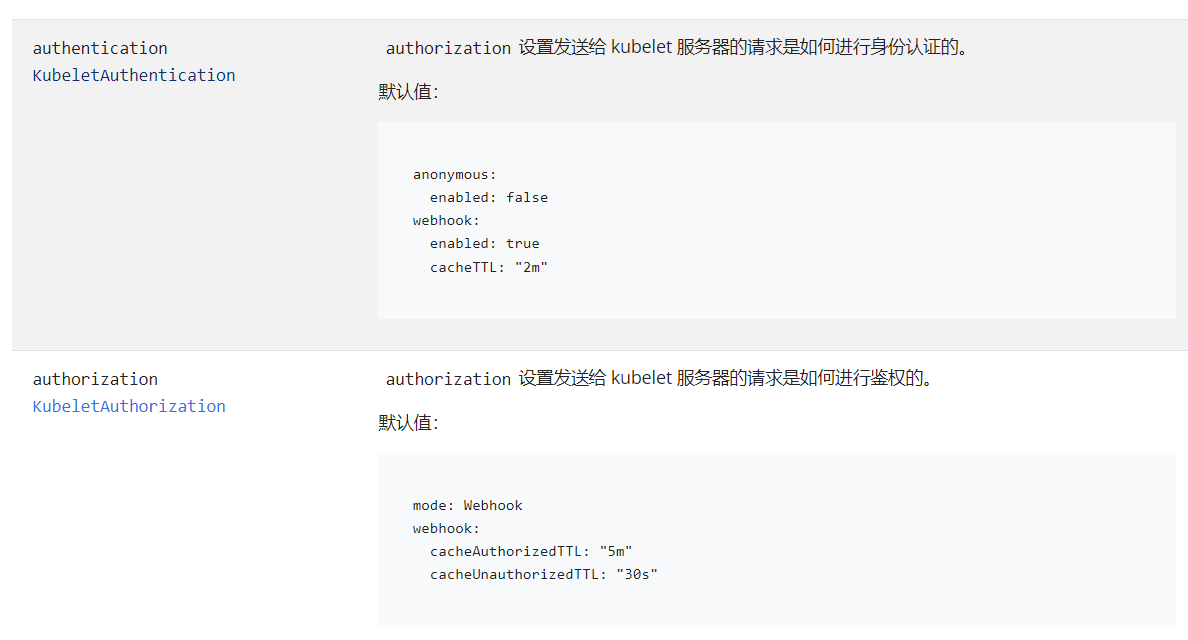
apiVersion: kubelet.config.k8s.io/v1beta1
authentication:
anonymous: # 修改 anonymous 下的,将 true 改为 false
enabled: false # 该为 false
webhook:
cacheTTL: 0s
enabled: true # 这个 webhook 下的 true 不要改
x509:
clientCAFile: /etc/kubernetes/pki/ca.crt
authorization: # 修改 authorization 下的
mode: Webhook # 改为Webhook
webhook:
......
# 编辑完后重新加载配置文件,并重启kubelet
systemctl daemon-reload
systemctl restart kubelet.service
4. 修改etcd
# 可以使用这条命令查
kube-bench

修改之前先备份一下文件。
cp /etc/kubernetes/manifests/etcd.yaml bak01/
vim /etc/kubernetes/manifests/etcd.yaml
修改:
--client-cert-auth=true # 修改为true
修改完后,等待5分钟左右,再检查一下所有pod,确保所有pod都正常。
kubectl get pod -A
# 退出返回到堡垒机 或者重新打开终端
exit
CKS 考试题整理 (03)-kube-bench 修复不安全项的更多相关文章
- linux基础:第三关课前考试题整理
1.如何取得/etc/hosts 文件的权限对应的数字内容,如-rw-r--r-- 为 644, 要求使用命令取得644 这样的数字. [root@server ~]# stat /etc/hosts ...
- 【web前端面试题整理03】来看一点CSS相关的吧
前言 昨天我们整理了14到js的题,今天我们再来整理14到CSS相关的题目,昨天整理时候时间有点晚了我便有点心浮气躁,里面的一些题需要再次解答,好了看看今天有些什么吧. PS:我这里挑一点来做就好了, ...
- node.js整理 03文件操作-遍历目录和文本编码
遍历目录 递归算法 遍历目录时一般使用递归算法,否则就难以编写出简洁的代码. 递归算法与数学归纳法类似,通过不断缩小问题的规模来解决问题 function factorial(n) { if (n = ...
- win7 ubuntu10.04双系统,重装win7后,修复双启动项
进入ubuntu的liveCD(即在试用ubuntu里),在终端里操作 首先要找到自己的ubuntu系统挂载在那个sda下面.可以用sudo fdisk -l 这个命令.然后: 1. sudo -i ...
- 机器学习 —— 基础整理(五)线性回归;二项Logistic回归;Softmax回归及其梯度推导;广义线性模型
本文简单整理了以下内容: (一)线性回归 (二)二分类:二项Logistic回归 (三)多分类:Softmax回归 (四)广义线性模型 闲话:二项Logistic回归是我去年入门机器学习时学的第一个模 ...
- 【Linux】CentOS7 安装,遇到的各种问题,并修复win7启动项
https://www.cnblogs.com/sxdcgaq8080/p/7457255.html ------------------------------------------------- ...
- ubuntu live cd修复grub引导项
1. 通过Ubuntu Live CD(安装盘,选择try Ubuntu)进入Ubuntu系统 打开终端,依次进行如下操作: 1. sudo fdisk -l 出现如下界面: 2. 然后会看到,有好多 ...
- Ubuntu 修复windows启动项
打开终端输入命令sudo gedit /etc/default/grub修改GRUB_TIMEOUT="10"然后在终端中输入sudo update-grubupdate 命令会自 ...
- 2019.03.29 bzoj5463: [APIO2018] 铁人两项(圆方树+树形dp)
传送门 题意简述:给你一张无向图,问你满足存在从a−>b−>ca->b->ca−>b−>c且不经过重复节点的路径的有序点对(a,b,c)(a,b,c)(a,b,c) ...
- Window磁盘错误修复chkdsk
场景: 狗日的垃圾移动磁盘.U盘质量太差劲,会出现磁盘坏道.读写异常~心疼数据.... 命令: 01.Win+R 调出cmd 02.根据移动盘符或磁盘盘符,进行修复 03.执行修复chkdsk /f ...
随机推荐
- Go语言:通过TDD驱动测试开发为同事写的程序优化提速——初次接触并发与channel
正文: 假如同事已经写了一个 CheckWebsites 的函数检查 URL 列表的状态. package concurrency type WebsiteChecker func(string) b ...
- 基于Admin.NET框架的前端的一些改进和代码生成处理(2)
在上篇随笔<基于Admin.NET框架的前端的一些改进和代码生成处理(1)>中大致介绍了一些关于对Admin.NET框架的前端的改造工作,主要目的就是希望能够增加前端代码的简洁性和可读性, ...
- Swift之struct二进制大小分析
作者:京东零售 邓立兵 随着Swift的日渐成熟和给开发过程带来的便利性及安全性,京喜App中的原生业务模块和基础模块使用Swift开发占比逐渐增高.本次讨论的是struct对比Class的一些优劣势 ...
- 全网最详细中英文ChatGPT-GPT-4示例文档-快速创意生成从0到1快速入门——官网推荐的48种最佳应用场景(附python/node.js/curl命令源代码,小白也能学)
目录 Introduce 简介 setting 设置 Prompt 提示 Sample response 回复样本 API request 接口请求 python接口请求示例 node.js接口请求示 ...
- kubernetes(k8s)常用deploy模板 并验证
kubernetes常用deploy模板,并验证 编写deploy配置文件 root@hello:~# cat deploy.yaml apiVersion: apps/v1 kind: Deplo ...
- python内在模块之winreg --- Windows 注册表访问
winreg --- Windows 注册表访问¶ 这些函数将 Windows 注册表 API 暴露给 Python.为了确保即便程序员忽略了显式关闭句柄,该句柄依然能够正确关闭,它使用了一个 han ...
- [Linux/CentOS]通过yum获取rpm安装包
1 yum获取rpm安装包 有时候你需要一个软件包在离线linux系统上安装,如果自己找软件包麻烦,可以linux yum下载需要的软件包. 准备工作是找一台能够联网的linux,并准备好了yum及y ...
- 分享一个开源的windows安卓投屏工具,scrcpy
看到scrcpy可能很多人会以为是大名鼎鼎的Scrcpy(一个十分强大的多线路爬虫框架),sorry今天分享的主角不是他,而是他: github地址:https://github.com/Genymo ...
- 计算机常用的快捷键以及常用的Dos命令
计算机的常用快捷键有哪些? 今天我重温了Java基础的课程,计算机的快捷键大家肯定不陌生. 计算机的常用快捷键 ctrl+c 复制 ctrl+v 粘贴 ctrl+s 保存 ctrl+x 剪切 ct ...
- 使用Java接入小程序订阅消息!
更新完微信服务号的模板消息之后,我又赶紧把微信小程序的订阅消息给实现了!之前我一直以为微信小程序也是要企业才能申请,没想到小程序个人就能申请. 消息推送平台推送下发[邮件][短信][微信服务号][微信 ...