PIE SDK坐标转换算法
1.算法功能简介
数据坐标转换是空间实体位置的位置描述,是从一种坐标系统变换到另一坐标系统的过程。通过建立两个坐标系之间一一对应关系来实现。是各种比例尺地图测量和编绘中建立地图数学基础必不可少的步骤。两个及以上的坐标转换是由极坐标参照确定维数空间。
目前国内常见的坐标转换有以下5种:大地坐标(BLH)对平面直角坐标(XYZ)、北京54、西安80及WGS84坐标的相互转换、任意两空间坐标系的转换、十进制角度和度分秒格式之间进行转换、经纬度和UTM坐标之间进行转换。
转换的方法分二维转换和三维转换;二维转换放缓是将平面坐标转换到另一个坐标系统;三维转换该方法基本操作步骤是利用公共点,也就是同时具有WGS84直角坐标和地方坐标的直角坐标的点位,一般需要3个以上重合点,通过布尔莎模型(或其他模型)进行计算,得到从一个系统转换到另一个系统中的平移参数、旋转参数和比例因子。三维转换方法可使你确定最多7个转换参数(3个平移参数,3个旋转参数和1个比例因子)。用户也可以选择确定几个参数。对于三维转换方法,可以仅用3个公共点来计算转换参数,但使用4个以上点可得到更多的观测值并且可以计算残差。用这种方法计算转换参数的优点在于能够保持GPS测量的精度,只要地方坐标精度足够(包括高程),这种方法能适用任何区域。
PIE支持坐标算法功能的执行,下面对该算法功能进行介绍。
2.算法功能实现说明
2.1 实现步骤
|
第一步 |
算法参数设置 |
|
第二步 |
算法执行 |
|
第三步 |
结果显示 |
2.2 算法参数
|
C#算法DLL |
PIE.CommonAlgo.dll |
|
|
C#算法名称 |
PIE.CommonAlgo.RasterToContourContructAlgo |
|
|
参数结构体 |
RasterToContourContruct_Exchange_Info |
|
|
参数说明 |
||
|
BandIndex |
Int |
波段 |
|
BAutoSetStartEndValue |
bool |
是否自动计算起始终止值 |
|
BClosed |
bool |
是否闭合 |
|
BGenerateContourFace |
bool |
是否生成等值面 |
|
BGenerateContourLine |
bool |
是否生成等值线 |
|
EndValue |
double |
终止值 |
|
InputRasterDataset |
IRasterDataset |
输入栅格数据集 |
|
OutputContourFaceFDataset |
IFeatureDataset |
输出等值面(内存) |
|
OutputContourLineFDataset |
IFeatureDataset |
输出等值线 (内存) |
|
SampleRatio |
int |
采样比 |
|
StartValue |
double |
起始值 |
|
ValueInterval |
double |
间隔 |
2.3 示例代码
|
数据路径 |
百度云盘地址下/ PIE示例数据/栅格数据/04.World/World.tif |
|
示例代码 |
|
/// <summary> |
|
2.4 示例截图
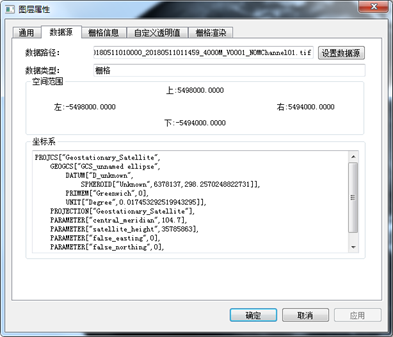
图1:源数据坐标系统信息
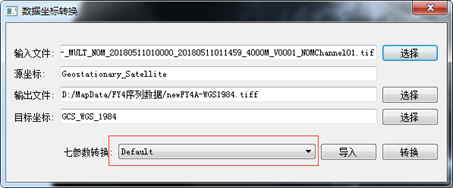
图2:数据坐标转换功能界面
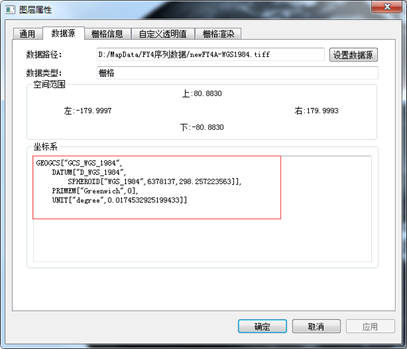
图3:坐标转换后空间参考系统
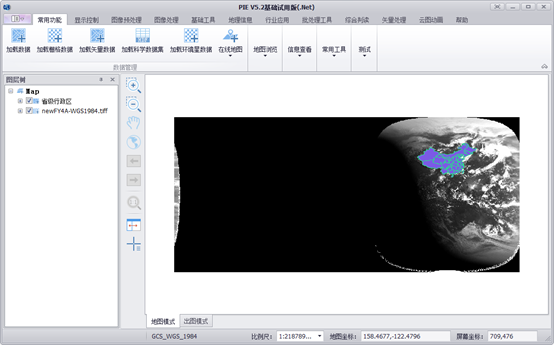
图4:结果图
注意:坐标转换需要设置参数,可以在图2 界面最下面的其参数设置七参数,不知道可以选默认Default,最好设置七参数,本示例用的是标称投影Geostationary_Satellite转WGS-1984,七参数设置默认。
PIE SDK坐标转换算法的更多相关文章
- PIE SDK算法的同步调用
1. 算法功能简介 同步调用一旦开始,调用者必须等到方法调用返回后,才能继续后续的行为. PIE SDK支持算法功能的执行,下面对算法的同步调用功能进行介绍. 2. 算法功能实现说明 2. ...
- PIE SDK算法的异步调用
1.算法功能简介 异步方法一旦开始,方法调用就会立即返回,调用者就可以继续后续的操作.异步方法通常会在另外一个线程中,“真实”地执行着.整个过程,不会阻碍调用者的工作. PIE SDK支持算法功能的执 ...
- PIE SDK 文章目录索引
1.PIE SDK介绍 1.1. PIE软件介绍 1.2. PIE SDK介绍 1.3. PIE支持项目介绍 1.4. PIE.NET-SDK插件式二次开发介绍 1.5. PIE.NET-S ...
- PIE SDK 距离分类和最大似然分类
1.算法功能简介 监督分类,也叫训练场地法.训练分类法,是遥感图像分类的一种,用被确认类别的样本像元去识别其他未知类别像元的过程.监督分类算法有平行算法.平行六面体法.最小距离法.最大似然法.马 ...
- PIE SDK波谱运算
1.算法功能简介 波谱运算(Spectral Math)是一种灵活的波谱处理工具,可以用数学表达式或IDL程序对波谱曲线(以及选择的多波段图像)进行处理.波谱曲线可以来自一幅多波段图像的Z剖面.波谱库 ...
- PIE SDK波段运算
1.算法功能简介 波段运算(Band Math)工具能够方便的执行图像中的各个波段的加减乘除.三角函数.指数.对数等数学函数计算,也可以使用IDL编写的函数. 由于每个用户都有独特的需求,利用此工具用 ...
- PIE SDK创建掩膜
1.算法功能简介 图像掩膜(Mask)用选定的图像.图形或物体,对处理的图像(全部或局部)进行遮挡,来控制图像处理的区域或处理过程.掩膜是一种图像滤镜的模板,实用掩膜经常处理的是遥感图像.当提取道 ...
- PIE SDK应用掩膜
1.算法功能简介 当对一幅图像应用掩膜时, 1 值的区域被保留, 0 值的区域被舍弃( 1 值区域被处理, 0 值区域被屏蔽不参与计算). PIE SDK支持算法功能的执行,下面对应用掩膜算法功能进行 ...
- PIE SDK ISODATA分类
1.算法功能简介 ISODATA(IterativeSelf-OrganizingDataAnalysisTechniqueAlgorithm)即迭代式自组织数据分析技术, 其大致原理是首先计算数据空 ...
随机推荐
- idea加载springboot 项目热加载失效
需要打开 help -> find action ->registry ->其中的compiler.automake.allow.when.app.running勾上
- JS高阶---浏览器内核
不同浏览器的内核,不太一样 360双核切换机制 一般涉及到金钱交易时,会切换到Trident内核,因为IE内核安全性较稳 不涉及金钱利益时,则会使用webkit内核 (1)内核是由很多模块构成 注意: ...
- ssh密钥批量分发
#################以下所有的命令脚本都是在centos7系统上实现,centos6略有不同 客户端使用公钥连接服务器的步骤: 提起ssh我们就能想到的是远程连接,平时我们都是通过密码来 ...
- 微信小程序实现图片放大预览效果
可以直接用微信程序自己的api很方便的实现 核心方法 wx.previewImage: 直接上代码, wxml: <!--pages/prewpicture/prew.wxml--> &l ...
- Spring 中的异常处理
工作中遇到这样的同事,问他活干完吗,他说开发好了,结果测试时发现各种异常情况未处理,联调测试时各种未知错误,最后联调完成比他预期的两倍工作量还多.这样的开发如果是新人还可以原谅,如果有工作经验且出现多 ...
- Linux性能优化实战学习笔记:第五讲
一.什么是CPU的使用率 1.你最常用什么指标来描述系统的CPU性能? 我想你的答案,可能不是平均负载,也不是CPU上下文切换,而是另一个更直观的指标CPU使用率 CPU使用率到底是怎么算出来的吗? ...
- [LeetCode] 911. Online Election 在线选举
In an election, the i-th vote was cast for persons[i] at time times[i]. Now, we would like to implem ...
- [LeetCode] 565. Array Nesting 数组嵌套
A zero-indexed array A of length N contains all integers from 0 to N-1. Find and return the longest ...
- 把 DataTable 输出到 excel 文件
''' <summary> ''' 把 DataTable 输出到 excel 文件 ''' </summary> ''' <param name="dt_da ...
- java、ajax 跨域请求解决方案('Access-Control-Allow-Origin' header is present on the requested resource. Origin '请求源' is therefore not allowed access.)
1.情景展示 ajax调取java服务器请求报错 报错信息如下: 'Access-Control-Allow-Origin' header is present on the requested ...