PWM呼吸灯
1.PWM简介
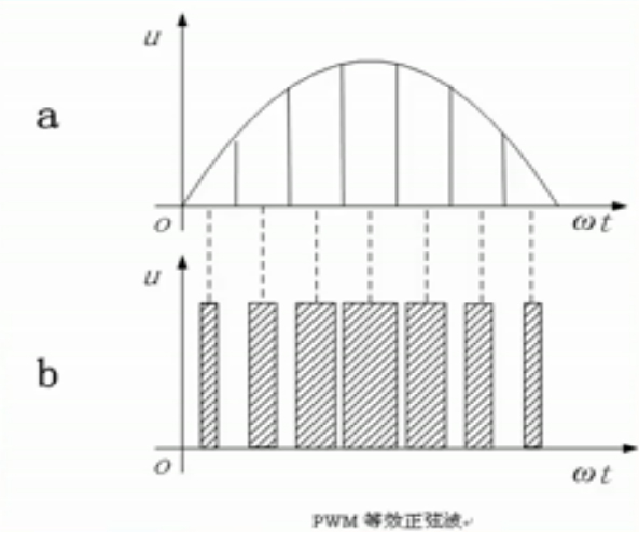
PWM是 Pulse Width Modulation 的缩写,中文意思就是脉冲宽度调 制,简称脉宽调制。它是利用微处理器的数字输出来对模拟电路进行控 制的一种非常有效的技术,其控制简单、灵活和动态响应好等优点而成 为电力电子技术最广泛应用的控制方式,其应用领域包括测量,通信, 功率控制与变换,电动机控制、伺服控制、调光、开关电源,甚至某些 音频放大器,因此学习PWM具有十分重要的现实意义。
其实我们也可以这样理解,PWM是一种对模拟信号电平进行数字编码 的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个 具体模拟信号的电平进行编码。PWM 信号仍然是数字的,因为在给定的 任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。电压 或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去 的。通的时候即是直流供电被加到负载上的时候,断的时候即是供电被 断开的时候。只要带宽足够,任何模拟值都可以使用 PWM 进行编码。
2.STM32F1 PWM介绍
STM32F1除了基本定时器TIM6和TIM7,其他定时器都可以产生PWM输出 。其中高级定时器 TIM1 和 TIM8 可以同时产生多达 7 路的 PWM 输出 。而通用定时器也能同时产生多达 4路的 PWM 输出,这些在定时器中断 章节中已经介绍过。 PWM的输出其实就是对外输出脉宽可调(即占空比调节)的方波信号 ,信号频率是由自动重装寄存器 ARR 的值决定,占空比由比较寄存器 CCR 的值决定。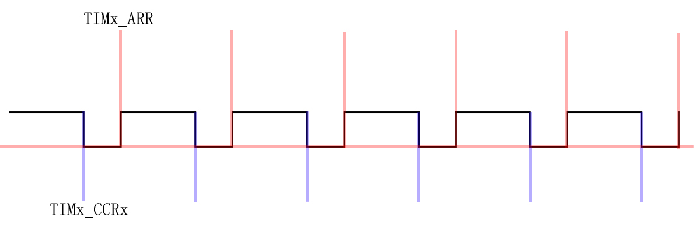
PWM输出比较模式总共有8种,具体由寄存器 CCMRx 的位 OCxM[2:0] 配置。我们这里只讲解最常用的两种PWM输出模式:PWM1和PWM2,其他几 种模式可以参考《STM32F10x中文参考手册》13、14、15定时器章节。 PWM1和PWM2这两种模式用法差不多,区别之处就是输出电平的极性不 同。

PWM模式根据计数器CNT计数方式,可分为边沿对齐模式和中心对齐模 式。
(1)PWM边沿对齐模式
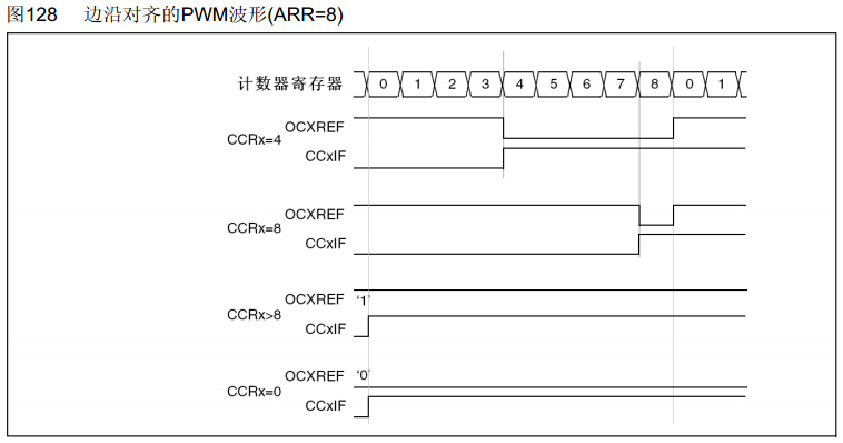
当 TIMx_CR1 寄存器中的 DIR 位为低时执行递增计数,计数器CNT从 0 计数到自动重载值(TIMx_ARR 寄存器的内容),然后重新从 0 开始 计数并生成计数器上溢事件。 以 PWM 模式 1 为例。只要TIMx_CNT < TIMx_CCRx, PWM 参考信号 OCxREF 便为有效的高电平,否则为无效的低电平。如果 TIMx_CCRx 中 的比较值大于自动重载值(TIMx_ARR 中),则 OCxREF 保持为“ 1”。 如果比较值为 0, 则 OCxREF 保持为“ 0”。
当 TIMx_CR1 寄存器中的 DIR 位为高时执行递减计数,计数器CNT从 自动重载值(TIMx_ARR 寄存器的内容)递减计数到0,然后重新从 TIMx_ARR值开始计数并生成计数器下溢事件。 以 PWM 模式 1 为例。只要TIMx_CNT >TIMx_CCRx, PWM 参考信号 OCxREF 便为无效的低电平,否则为有效的高电平。如果 TIMx_CCRx 中 的比较值大于自动重载值(TIMx_ARR 中),则 OCxREF 保持为“ 1”。 此模式下不能产生0%的PWM波形。
(2)PWM中心对齐模式 在中心对齐模式下,计数器 CNT 是工作做递增/递减模式下。开始的 时候, 计数器CNT 从 0 开始计数到自动重载值减 1(ARR-1),生成计数 器上溢事件;然后从自动重载值开始向下计数到 1 并生成计数器下溢事 件。之后从 0 开始重新计数。
我们以ARR=8,CCRx=4为例进行介绍。第一阶段计数器CNT工作在递增 计数方式,从0开始计数,当TIMx_CNT < TIMx_CCRx时,PWM 参考信号 OCxREF为高电平,当TIMx_CNT >= TIMx_CCRx时,PWM 参考信号 OCxREF 为低电平。第二阶段计数器CNT工作在递减计数方式,从ARR开始递减计 数,当TIMx_CNT > TIMx_CCRx时,PWM 参考信号 OCxREF为低电平,当 TIMx_CNT <= TIMx_CCRx时,PWM 参考信号 OCxREF为高电平。
3.PWM输出配置步骤
(1)使能定时器及端口时钟,并设置引脚复用器映射
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);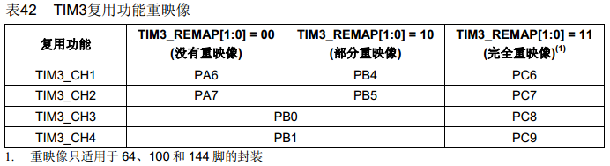
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_PinRemapConfig(GPIO_FullRemap_TIM3,ENABLE);
可选的参数在 stm32f10x_gpio.h 都已经列出来非常详细
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;//复用推挽输出
(2)初始化定时器参数,包含自动重装值,分频系数,计数方式等
voidTIM_TimeBaseInit(TIM_TypeDef*TIMx,TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);
(3)初始化PWM输出参数,包含PWM模式、输出极性,使能等
void TIM_OCxInit(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
typedef struct
{
uint16_t TIM_OCMode; //比较输出模式
uint16_t TIM_OutputState; //比较输出使能
uint16_t TIM_OutputNState; //比较互补输出使能
uint32_t TIM_Pulse; //脉冲宽度
uint16_t TIM_OCPolarity; //输出极性
uint16_t TIM_OCNPolarity; //互补比较输出极性
uint16_t TIM_OCIdleState; //空闲状态下比较输出状态
uint16_t TIM_OCNIdleState; //空闲状态下比较输出状态
} TIM_OCInitTypeDef;
如果我们要配置TIM3的CH1为PWM1模式,输出极性为低电平,并且使能 PWM输出,可以如下配置:
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_Low;
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;
TIM_OC1Init(TIM3,&TIM_OCInitStructure); //输出比较通道1初始化
(4)开启定时器
void TIM_Cmd(TIM_TypeDef* TIMx, FunctionalState NewState); TIM_Cmd(TIM3,ENABLE); //开启定时器
(5)修改TIMx_CCRx的值控制占空比 //compare最大到ARR的设置的值。
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint32_t Compare1);
(6)使能TIMx在CCRx上的预装载寄存器 使能输出比较预装载库函数是:
void TIM_OCxPreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
第一个参数用于选择定时器,第二个参数用于选择使能还是失能输出比较预装载寄存器,可选择为TIM_OCPreload_Enable、TIM_OCPreload_Disable。
(7)使能 TIMx 在 ARR 上的预装载寄存器允许位 使能 TIMx 在 ARR 上的预装载寄存器允许位库函数是:
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
第一个参数用于选择定时器,第二个参数用于选择使能还是失能。
高级定时器要想输出PWM波形,必须要设置一个 MOE 位(TIMx_BDTR 的第 15 位),以使能主输出,否则不会输出 PWM。库函数设置的函数为:
void TIM_CtrlPWMOutputs(TIM_TypeDef* TIMx, FunctionalState NewState);
PWM呼吸灯的更多相关文章
- 12-ESP8266 SDK开发基础入门篇--PWM,呼吸灯
https://www.cnblogs.com/yangfengwu/p/11094085.html PWM其实没有什么,就是看着官方给的API,,,然后就是用呗 对了,其实对于RTOS SDK版本的 ...
- PWM(脉宽调制)——LED特效呼吸灯设计
简述PWM PWM--脉宽调制信号(Pulse Width Modulation),它利用微处理器的数字输出来实现,是对模拟电路控制的一种非常有效的技术,广泛应用于测量.通信.功率控制与变化等许多领域 ...
- 【iCore4 双核心板_ARM】例程八:定时器PWM实验——呼吸灯
实验原理: STM32的定时器有PWM功能,iCore4的蓝色LED连接在定时器的输出接口上, 可以通过定时器的PWM输出控制LED的亮度,从而实验呼吸灯的功能. 核心代码: int main(voi ...
- STM8S003F3通过PWM波实现三基色呼吸灯(转)
源: STM8S003F3通过PWM波实现三基色呼吸灯
- 浅浅的分析LED呼吸灯的实现和PWM的关系
前言 在本周,我们在python课上做了一个实验,用ARDUINO使小LED灯模仿出呼吸灯的效果,实验进行的很成功,但是机器当仅输出高/低电平的时候是怎么样才能做到渐亮渐暗(输出电压)的变化呢?在这里 ...
- STM8S PWM 应用 呼吸灯
//主功能接受:使用MCU STM8S105C6 的PWM通道2 PC2 来做呼吸灯 已经验证OK,呵 //呵,这个PWM设置刚開始用还是有点麻烦,由于是自己摸索.花点时间.还是解决了 . //所用子 ...
- [FPGA]Verilog利用PWM调制巧妙完成RGB三色彩虹呼吸灯(给简约的题目以美妙的解答)
概述 实现彩虹呼吸灯 题目就是这么简短,但这是目前我碰到的最有意思的一道题目,因为他有无数种解决方法,并且每一种都是那么高级或者巧妙,比如 可以利用3路不同初相的PWM调制信号驱动三颗RGB灯重叠呼吸 ...
- Arduino系列之pwm控制LED灯(呼吸灯)
下面我将写出最简单控制呼吸灯的方法 void setup() // { pinMode(12,OUTPUT); ...
- ZYNQ自定义AXI总线IP应用——PWM实现呼吸灯效果
一.前言 在实时性要求较高的场合中,CPU软件执行的方式显然不能满足需求,这时需要硬件逻辑实现部分功能.要想使自定义IP核被CPU访问,就必须带有总线接口.ZYNQ采用AXI BUS实现PS和PL之间 ...
随机推荐
- spring5 源码深度解析----- 事务的回滚和提交(100%理解事务)
上一篇文章讲解了获取事务,并且通过获取的connection设置只读.隔离级别等,这篇文章讲解剩下的事务的回滚和提交 回滚处理 之前已经完成了目标方法运行前的事务准备工作,而这些准备工作最大的目的无非 ...
- python编程基础之二十七
列表生成式:[exp for iter_var in iterable] 同样也会有字典生成式,集合生成式,没有元组生成式,元组生成式的语法被占用了 字典生成式,集合生成式,就是外面那个括号换成{} ...
- cocos2d-x 系统学习cocos(1)
简析HelloWorld场景 以前使用cocos2d-x 3.14的时候,HelloWorld并不是一个场景类,而是一个图层类,当时的HelloWorld::createScene()是长这样的 Sc ...
- JS里面的铠甲合体!
本标题党又回来了,最近在专心研究一些JS基础性的书籍,以期把原理都了解透彻,所以写文章的频率就降了下来.但是今天我必须要来写一下子,为什么呢,因为今天周五!先说明一下JS里面的拆箱与装箱指的是JS封箱 ...
- String的常见面试题
下面代码,是我前些天在网上搜集的一小部分String的面试题.个人觉得感触很深,希望对大家有所帮助.不好的也请大家批评指正. package com.zys.string; public class ...
- postman参数化
1.新建csv文件 2.csv文件中输入变量名和参数 3.postman中新增接口,并设置变量 4.选择进入 5.导入参数化csv格式文件,点击run 查看运行结果
- C 自删除技术---批处理方式
#include<stdio.h> #include<windows.h>#pragma comment(linker, "/subsystem:\"win ...
- [Luogu3070][USACO13JAN]岛游记Island Travels
题目描述 Farmer John has taken the cows to a vacation out on the ocean! The cows are living on N (1 < ...
- jmeter-中文乱码问题
1.被测系统中问乱码 解决办法:接口请求时添加编码方式UTF-8
- MySQL 分页查询优化——延迟关联优化
目录 1. InnoDB表的索引的几个概念 2. 覆盖索引和回表 3. 分页查询 4. 延迟关联优化 写在前面 下面的介绍均是在选用MySQL数据库和Innodb引擎的基础开展.我们先 ...