一、100ASK_IMX6ULL嵌入式裸板学习_LED实验(知识点补充)
知识点补充:
Linux进程中的五个段
BSS段(Block Started bySymbol,意为“以符号开始的块”):
BSS,是Unix链接器产生的未初始化数据段。通常是指用来存放程序中未初始化的全局变量的一块内存区域。BSS段属于静态内存分配。
代码段(code segment/text segment):
代码段通常是指用来存放程序执行代码的一块内存区域。这部分区域的大小在程序运行前就已经确定,并且内存区域通常属于只读, 某些架构也允许代码段为可写,即允许修改程序。在代码段中,也有可能包含一些只读的常数变量,例如字符串常量等。
堆(heap):
堆是用于存放进程运行中被动态分配的内存段,它的大小并不固定,可动态扩张或缩减。当进程调用malloc等函数分配内存时,新分配的内存就被动态添加到堆上(堆被扩张);当利用free等函数释放内存时,被释放的内存从堆中被剔除(堆被缩减)
栈(stack):
栈又称为堆栈,是用户存放程序临时创建的局部变量,也就是说我们函数括弧“{}”中定义的变量(但不包括static声明的变量,static意味着在数据段中存放变量)。除此以外,在函数被调用时,其参数也会被压入发起调用的进程栈中,并且待到调用结束后,函数的返回值也会被存放回栈中。由于栈的先进后出特点,所以栈特别方便用来保存/恢复调用现场。从这个意义上讲,我们可以把堆栈看成一个寄存、交换临时数据的内存区。它是由操作系统分配的,内存的申请与回收都由OS管理。
PS:
全局的未初始化变量存在于.bss段中,具体体现为一个占位符;全局的已初始化变量存于.data段中;而函数内的自动变量都在栈上分配空间。.bss是不占用.exe文件空间的,其内容由操作系统初始化(清零);而.data却需要占用,其内容由程序初始化,因此造成了上述情况。
bss段(未手动初始化的数据)并不给该段的数据分配空间,只是记录数据所需空间的大小。
data(已手动初始化的数据)段则为数据分配空间,数据保存在目标文件中。 数据段包含经过初始化的全局变量以及它们的值。BSS段的大小从可执行文件中得到 ,然后链接器得到这个大小的内存块,紧跟在数据段后面。当这个内存区进入程序的地址空间后全部清零。包含数据段和BSS段的整个区段此时通常称为数据区。
BSS段为什么要初始化/清除?
BSS段是不会出现在程序下载文件(*.bin *.hex)中的,因为全都是0。如果把它们出现在程序下载文件中,会增加程序下载文件的大小。实际应用中,通常只需要把bss段的起始地址和结束地址保存起来,而不需要将程序下载文件中出现bss段(一堆0)将来真正运行程序的时候,再根据这两个数据进行bss段的初始化就行了。
可执行映像文件
ELF:Linux操作系统下可执行映像文件格式,在Linux环境下用GCC编译器生成的可执行映像文件格式即为ELF格式,在Linux操作系统下可直接运行。
可执行映像文件主要分为3个段,即RO段、RW段和ZI段,如下图所示:

- RO段:只读代码段;
- RW段:RW区域放的是已赋值(赋0除外)的全局变量;
- ZI段:ZI区域放的是未赋值的全局变量或初始化为0的全局变量。
ARM裸板开发流程:
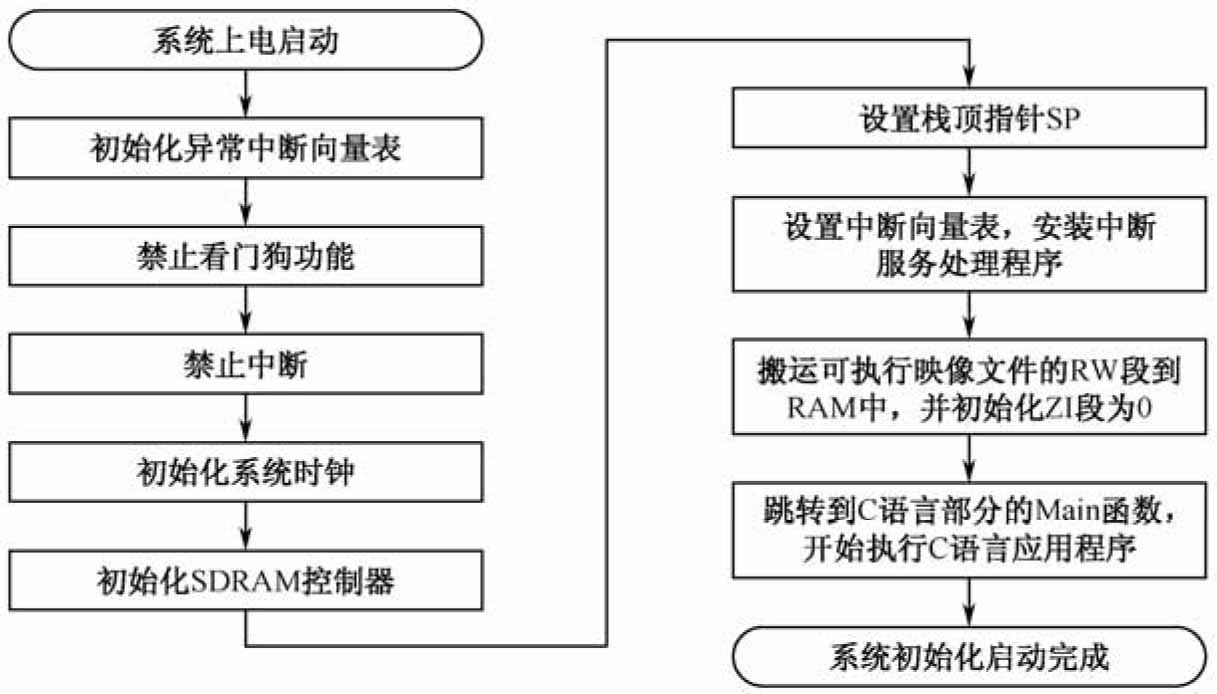
ARM系统上电后,首先就运行系统初始化程序,系统初始化程序主要完成系统最基本的硬件初始化,为后面的C语言应用程序提供运行环境。ARM系统初始化启动代码完成的主要功能如下:
- 初始化ARM CPU异常处理向量表;
- 禁止看门狗;
- 禁止中断;
- 初始化系统时钟,包括CPU主频FCLK、系统总线时钟频率HCLK、外设总线时钟频率PCLK;
- 初始化SDRAM控制器;
- 设置ARM CPU在各种模式下的栈指针(栈顶);
- 设置ARM中断向量表,安装中断处理程序;
- 搬运可执行映像文件的RW段到RAM中,并初始化ZI段为0;
- 跳转到C语言应用程序的Main函数,开始执行C语言应用程序。
到此,系统的初始化启动程序就完成了ARM系统的启动过程。
ARM系统的初始化启动代码一般用汇编语言编写,根据以上的分析,我们知道ARM系统初始化启动程序的流程如下图所示:
MOV PC,LR 指令解析
- SP(R13寄存器)
- LR(R14寄存器)
- pc(R15寄存器)
MOV PC,LR
LR寄存器保存了子程序的返回地址
而PC保存的是当前的地址,将LR的值给PC,即从子程序返回
LR寄存器在使用完跳转指令BL后会保存LR子程序的地址
如下例程:
.text
.global _start
_start:
//设置栈
ldr sp,=0x80200000
bl clean_bss //清除bss段
bl main
halt:
b halt
//清除BSS段
clean_bss:
ldr r1, =__bss_start
ldr r2, =__bss_end
mov r3, #0
clean:
str r3, [r1] //r1寄存器中的值所指向的地址处清零
add r1, r1, #4 //r1寄存器加4
cmp r1, r2 //r1的值减去r2的值,并改变相应的标志寄存器的值
bne clean //零标志位不等于零时跳转到标号clean处执行
mov pc, lr //子程序返回
mov pc, lr 起到的作用是在清除完bss段后回到bl clean处继续往下执行下一个指令(bl main)
LR寄存器一般来说有两个作用:
1、当使用bl或者blx跳转到子过程的时候,r14保存了返回地址,可以在调用过程结尾恢复。
2、异常中断发生时,这个异常模式特定的物理R14被设置成该异常模式将要返回的地址。
子程序返回的三种方法:
1.MOV PC,LR
2.BL LR
3.在子程序入口处使用以下指令将R14存入堆栈
STMFD SP!, {<Regs>,LR}
对应的,使用以下指令可以完成子程序的返回
LDMFD SP! , {<Regs>,LR}
GPIO普遍适用的操作方法
GPIO:general-purpose input/output,通用输入输出口
GPIO的一般结构:
有多组的GPIO,每组有多个GPIO口
- 使能:电源/时钟
- 模式(Mode):引脚可用于GPIO或其他功能
- 方向:引脚Mode设置为GPIO时,可以继续设置它是输出引脚还是输入引脚
- 数值:对于输出引脚,可以设置寄存器让它输出高、低电平
对于输入引脚们可以读取寄存器得到引脚的当前电平
对GPIO寄存器的操作
在芯片手册中找到介绍power/clock的相关章节,根据所述内容设置对应寄存器某个GPIO模块(Module)有些芯片的GPIO没有使能开关,是默认使能的,有的话则需要设置
具体到一个引脚,可以用于GPIO、串口、USB或其他的功能,有对应的寄存器来选择到底使用哪一个功能(芯片手册)
对于已经设置为GPIO功能的引脚,有方向寄存器用来设置它的方向:输出、输入
对于已经设置为GPIO功能的引脚,有数据寄存器用来读、写引脚电平状态
GPIO寄存器的2种操作方法
在平时开发时原则上是不能影响到其他的位
直接读写:读出、修改对应位、写入
模板:
设置bit n:
val = data_reg;
val = val | (1<<n);
data_reg = val;
要清除bit n:
val = data_reg;
val = val & ~(1<<n);
data_reg = val;
set-and-clear protocol:
set_reg , clr_reg , data_reg 三个寄存器对应的是同一个物理寄存器
要设置bit n:set_reg = (1<<n);
要清除bit n:clr_reg = (1<<n);
GPIO的其他功能:防抖动、中断、唤醒(后续补充)
对于IMX6ULL芯片的GPIO口
1、设置引脚功能(Mode、功能)
见IMX6ULL芯片手册——Chapter 32:IOMUX Controller (IOMUX)
一、100ASK_IMX6ULL嵌入式裸板学习_LED实验(知识点补充)的更多相关文章
- 讯为iTop4412嵌入式开发板学习之-------前言
一.linux 工作的分类以及培养时间 Linux 作为一个庞大的体系,有很多相关的研究领域,总结起来大致有五个方向: 1.服务器维护:需要了解 Linux 服务,熟练使用 Shell,了解网络配置. ...
- 【4412嵌入式开发板学习笔记】认识uboot
转自迅为讨论群:http://www.topeetboard.com 重要说明:这份笔记不是4412开发配套的,是我在网上看视频的时候下载上课老师的笔记后修改的.所以我试了一下笔记上的uboot命令, ...
- 嵌入式开发板iTOP4412学习开发板
网站:http://www.topeetboard.com 淘宝:https://item.taobao.com/item.htm?_u=okcahs0f42a&id=38712193806 ...
- 【嵌入式开发】 嵌入式开发工具简介 (裸板调试示例 | 交叉工具链 | Makefile | 链接器脚本 | eclipse JLink 调试环境)
作者 : 韩曙亮 博客地址 : http://blog.csdn.net/shulianghan/article/details/42239705 参考博客 : [嵌入式开发]嵌入式 开发环境 (远 ...
- 【arm学习】我的第一个裸板程序
初学ARM感觉写个裸板程序还真的不容易,可能是没有用到ADS,keil之类的开发平台的缘故吧.编译,链接过程在linux平台上完成,这样学起来更有实感,还能顺便熟悉linux环境,以及命令,何乐而不为 ...
- 学习嵌入式开发板的Android平台体系结构和源码结构
本文转自迅为论坛资料:http://www.topeetboard.com 推荐学习嵌入式开发板平台:iTOP-4412开发板 下面这张图出自Google官方,展示了Android系统的主要组成部分. ...
- 嵌入式 hi3518c裸板uboot烧写、kernel烧写、fs烧写小结
1.在uboot中我可以添加自己的命令,添加的方法是找到一个uboot的命令,然后模仿着去增加属于自己的命令代码以及实现函数就可以 2.记住在使用printf进行调试的时候,在遇到指针或者字符串的时候 ...
- S5PV210裸板驱动:启动
以往2440和6410的启动方式,只要我们把裸板代码烧写到NAND FLASH的开始位置,当开发板上点启动时,处理器会自动从NAND FLASH上拷贝前面一段的代码到内部的RAM中执行.按照以前的方法 ...
- 裸板中中断异常处理,linux中断异常处理 ,linux系统中断处理的API,中断处理函数的要求,内核中登记底半部的方式
1.linux系统中的中断处理 1.0裸板中中断异常是如何处理的? 以s5p6818+按键为例 1)按键中断的触发 中断源级配置 管脚功 ...
- 【嵌入式开发板】8月终极暑促迅为Cortex-a9四核入门开发板
核心板参数 尺寸 50mm*60mm 高度 连同连接器在内0.26cm CPU Exynos4412,四核Cortex-A9,主频为1.4GHz-1.6GHz 内存 1GB 双通道 DDR3(2GB ...
随机推荐
- 打开MASA Blazor的正确姿势2:组件总览
官网文档按拼音罗列组件,且部分嵌套组件没有在导航栏内列出,不利于浏览查阅.本篇文章的主要目的,主要是对所有组件按大家习惯的方式进行分类,简要介绍组件,并建立跳转官方文档的链接. 一.导航布局类 1 ...
- 数据存储单位、编程语言的发展史、python解释器版本、解释器的下载与安装、多版本共存、第一个python程序、pycharm下载
目录 一.数据存储单位 (1).简介 (2).换算单位 二.编程语言的发展史 (1).机器语言 (2).汇编语言 (3).高级语言 三.编程语言的分类 (1).编译型语言 (2).解释型语言 四.py ...
- 1 - 【RocketMQ 系列】CentOS 7.6 安装部署RocketMQ
一.前置准备工作 CentOS 7.6 安装 jdk1.8 openjdk 1.查看JDK版本 yum search java|grep jdk 2.安装jdk1.8,安装默认的目录为: /usr/l ...
- P2_小程序简介
小程序与普通网页开发的区别 运行环境不同 网页运行在浏览器环境中 小程序运行在微信环境中 API 不同 由于运行环境的不同,所以小程序中,无法调用 DOM 和 BOM 的 API. 但是,小程序中可以 ...
- Hystrix断路器
1.介绍 ①产生原因 服务雪崩: 多个微服务之间调用,假设A调用B,C,B和C又调用其他微服务,这就是扇出. 如果扇出的链路上有某个微服务调用响应时间过长或者不可用,那么A调用会占用越来越多的系统资源 ...
- SRS视频服务器CallBack的Demo
1.安装环境(很麻烦,可以选择编译启动) 官方文档快速开始docker配置: docker run --rm -it -p 1935:1935 -p 1985:1985 -p 8080:8080 -d ...
- HGAME_2023_WEB_WP_WEEK3
Ping to the host 很明显的rce,简单测试一下发现空格,cat,:被办,且执行无回显,空格用${IFS},%09,$IFS$9等等来绕过,我们利用dnslog将执行结果外带出来,这里使 ...
- 个人博客系统Typecho情侣主题模板Cupid
个人博客系统Typecho情侣主题模板Cupid 转载:https://zcjun.com/3175.html
- swiper列数 slidesPerView属性决定
swiper轮播一行有几列如下决定 slidesPerView为3是三列,不写一列 // 初始化文章swiper var newsSwiper = new Swiper('#news-swiper', ...
- CF873F - Forbidden Indices
题意:对于一个字符串 \(S\),有一些位置是被 \(\text{Ban}\) 掉的. 对于这个字符串的所有子串,它的分数是(长度 \(\times\) 在没有被 \(\text{Ban}\) 掉的位 ...