SURF算法
一、原理:
Sift算法的优点是特征稳定,对旋转、尺度变换、亮度保持不变性,对视角变换、噪声也有一定程度的稳定性;缺点是实时性不高,并且对于边缘光滑目标的特征点提取能力较弱。
Surf(Speeded Up Robust Features)改进了特征的提取和描述方式,用一种更为高效的方式完成特征的提取和描述。
二、Surf实现流程如下:
1. 构建Hessian(黑塞矩阵),生成所有的兴趣点,用于特征的提取
黑塞矩阵(Hessian Matrix)是一个多元函数的二阶偏导数构成的方阵,描述了函数的局部曲率。由德国数学家Ludwin Otto Hessian于19世纪提出。
surf构造的金字塔图像与sift有很大不同,Sift采用的是DOG图像,而surf采用的是Hessian矩阵行列式近似值图像。
Hessian矩阵是Surf算法的核心,构建Hessian矩阵的目的是为了生成图像稳定的边缘点(突变点),为下文的特征提取做好基础。
每一个像素点都可以求出一个Hessian矩阵。
Hessian矩阵的判别式为:
当Hessian矩阵的判别式取得局部极大值时,判定当前点是比周围邻域内其他点更亮或更暗的点,由此来定位关键点的位置。
在SURF算法中,图像像素l(x,y)即为函数值f(x,y)。但是由于我们的特征点需要具备尺度无关性,所以在进行Hessian矩阵构造前,需要对其进行高斯滤波,选用二阶标准高斯函数作为滤波器。
L(x,t)=G(t)⋅I(x,t)" role="presentation" style="font-size: 100%; display: inline-block; position: relative;">L(x,t)=G(t)⋅I(x,t)
通过特定核间的卷积计算二阶偏导数。通过特定核间的卷积计算二阶偏导数,这样便能计算出H矩阵的三个矩阵元素L_xx, L_xy, L_yy从而计算出H矩阵:
H(x,σ)=[Lxx(x,σ)Lxy(x,σ)Lxy(x,σ)Lyy(x,σ)]" role="presentation" style="font-size: 100%; display: inline-block; position: relative;">H(x,σ)=[Lxx(x,σ)Lxy(x,σ)Lxy(x,σ)Lyy(x,σ)]
由于高斯核是服从正态分布的,从中心点往外,系数越来越低,为了提高运算速度,Surf使用了盒式滤波器来近似替代高斯滤波器,提高运算速度。
盒式滤波器(Boxfilter)对图像的滤波转化成计算图像上不同区域间像素和的加减运算问题,只需要简单几次查找积分图就可以完成。
每个像素的Hessian矩阵行列式的近似值:
det(H)=Dxx∗Dyy−(0.9∗Dxy)2" role="presentation" style="font-size: 100%; display: inline-block; position: relative;">det(H)=Dxx∗Dyy−(0.9∗Dxy)2
在Dxy上乘了一个加权系数0.9,目的是为了平衡因使用盒式滤波器近似所带来的误差:
2. 构建尺度空间
同Sift一样,Surf的尺度空间也是由O组L层组成,不同的是,Sift中下一组图像的尺寸是上一组的一半,同一组间图像尺寸一样,但是所使用的高斯模糊系数逐渐增大;而在Surf中,不同组间图像的尺寸都是一致的,但不同组间使用的盒式滤波器的模板尺寸逐渐增大,同一组间不同层间使用相同尺寸的滤波器,但是滤波器的模糊系数逐渐增大。

3. 特征点定位
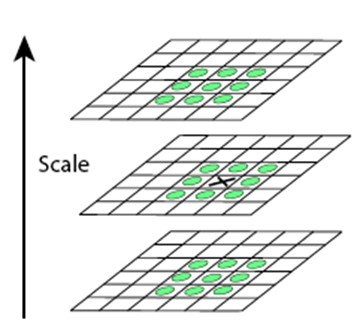
特征点的定位过程Surf和Sift保持一致,将经过Hessian矩阵处理的每个像素点与二维图像空间和尺度空间邻域内的26个点进行比较,初步定位出关键点,再经过滤除能量比较弱的关键点以及错误定位的关键点,筛选出最终的稳定的特征点。
4. 特征点主方向分配
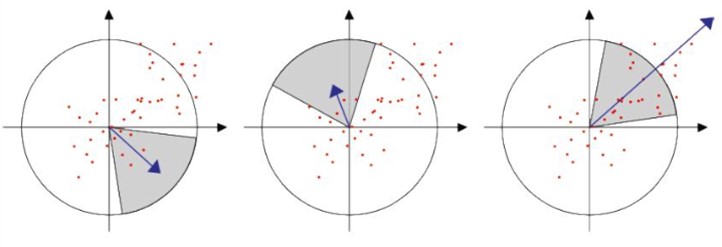
Sift特征点方向分配是采用在特征点邻域内统计其梯度直方图,而在Surf中,采用的是统计特征点圆形邻域内的harr小波特征。
在特征点的圆形邻域内,统计60度扇形内所有点的水平、垂直harr小波特征总和,然后扇形以一定间隔进行旋转并再次统计该区域内harr小波特征值之后,最后将值最大的那个扇形的方向作为该特征点的主方向。
5. 生成特征点描述子
在Sift中,是取特征点周围44个区域块,统计每小块内8个梯度方向,用着448=128维向量作为Sift特征的描述子。
Surf算法中,也是在特征点周围取一个44的矩形区域块,但是所取得矩形区域方向是沿着特征点的主方向。每个子区域统计25个像素的水平方向和垂直方向的haar小波特征,这里的水平和垂直方向都是相对主方向而言的。该haar小波特征为水平方向值之后、垂直方向值之后、水平方向绝对值之后以及垂直方向绝对值之和4个方向。
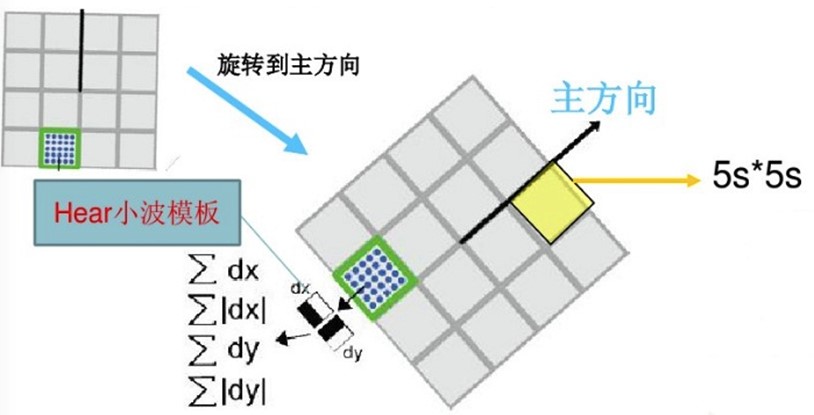
把这4个值作为每个子块区域的特征向量,所以一共有444=64维向量作为Surf特征的描述子,比Sift特征的描述子减少了一半。
6. 特征点匹配
与Sift特征点匹配类似,Surf也是通过计算两个特征点间的欧式距离来确定匹配度,欧氏距离越短,代表两个特征点的匹配度越好。
不同的是Surf还加入了Hessian矩阵迹的判断,如果两个特征点的矩阵迹正负号相同,代表这两个特征具有相同方向上的对比度变化,如果不同,说明这两个特征点的对比度变化方向是相反的,即使欧氏距离为0,也直接予以排除。
SURF算法的更多相关文章
- SURF算法与源码分析、上
如果说SIFT算法中使用DOG对LOG进行了简化,提高了搜索特征点的速度,那么SURF算法则是对DoH的简化与近似.虽然SIFT算法已经被认为是最有效的,也是最常用的特征点提取的算法,但如果不借助于硬 ...
- SURF算法与源码分析、下
上一篇文章 SURF算法与源码分析.上 中主要分析的是SURF特征点定位的算法原理与相关OpenCV中的源码分析,这篇文章接着上篇文章对已经定位到的SURF特征点进行特征描述.这一步至关重要,这是SU ...
- 在OpenCV3.1.0中使用SIFT,SURF算法
写在前边: 1.我使用的是python2.7 + OpenCV3.1.0 2.OpenCV3.0.0+的文档有很大问题,很多文档写的还是OpenCV2.0+, OpenCV3.0+根本用不了,其中有一 ...
- sift 与 surf 算法
http://blog.csdn.net/cy513/article/details/4414352 SURF算法是SIFT算法的加速版,OpenCV的SURF算法在适中的条件下完成两幅图像中物体的匹 ...
- 特征点检测学习_2(surf算法)
依旧转载自作者:tornadomeet 出处:http://www.cnblogs.com/tornadomeet 特征点检测学习_2(surf算法) 在上篇博客特征点检测学习_1(sift算法) 中 ...
- OpenCV中的SURF算法介绍
SURF:speed up robust feature,翻译为快速鲁棒特征.首先就其中涉及到的特征点和描述符做一些简单的介绍: 特征点和描述符 特征点分为两类:狭义特征点和广义特征点.狭义特征点的位 ...
- surf算法解析
surf构造的金字塔图像与sift有很大的不同,sift采用的是DOG图像,surf采用的是hessian矩阵行列式近似值图像,hessian矩阵是surf算法的核心,构建hessian矩阵的目的是为 ...
- 模式匹配之surf----特征点检测学习_2(surf算法)
在上篇博客特征点检测学习_1(sift算法) 中简单介绍了经典的sift算法,sift算法比较稳定,检测到的特征点也比较多,其最大的确定是计算复杂度较高.后面有不少学者对其进行了改进,其中比较出名的就 ...
- [转]SURF算法解析
SURF算法解析 一.积分图像 积分图像的概念是由Viola和Jones提出的.积分图像中任意一点(i,j)的值为原图像左上角到任意点(i,j)相应的对焦区域的灰度值的总和,其数学公式如图1所示 ...
随机推荐
- oracle数据库添加新用户
/*分为四步 */ /*第1步:创建临时表空间 */ create temporary tablespace kmyf_temp tempfile 'E:\app\pangxy\product\11. ...
- Linux内核分析第三周学习总结
Linux内核源码简介 arch/ 该目录中包含和硬件体系结构相关的代码,每种平台占一个相应的目录. 和32位PC相关的代码存放在x86目录下. 每种平台至少包含3个子目录:kernel(存放支持体系 ...
- python语言几个常见函数的使用
写代码,有如下变量,请按照要求实现每个功能: name = " Kobe Bean Bryant" a. 移除 name 变量对应的值左边的空格,并输出移除后的内容 name = ...
- GitLab添加ssh-key,操作无需每次输入账号密码
git config --global credential.helper store 然后操作pull/push 会让输入用户名密码,第一次输入进去.下次再操作pull/push时就不需要输入用户名 ...
- [MS] 微软官网下载安装SQLSERVER2019的rpm
快速入门:安装 SQL Server 和 Red Hat 上创建数据库 https://docs.microsoft.com/zh-cn/sql/linux/quickstart-install-co ...
- [转帖]浪潮openstack的逆袭
扬长补短 浪潮云平台的逆袭 http://blog.itpub.net/11310314/viewspace-2564083/ 浪潮并不是最早加入OpenStack的国内厂商,却实现同比303.1%的 ...
- Oracle Gateways 方式创建dblink 连接 SQLSERVER数据库
1. 安装多次 发现在同一个机器上面总出问题,所以建议找一个没有安装oracle的机器上面进行安装gateways 2. 下载oracle gateways 并且解压缩, 下载地址详情见官网. 下载的 ...
- MongoDb在windows10下的安装、创建用户和数据库
1.mongodb下载地址https://www.mongodb.com/download-center#community 2.安装 3.在D:\MongoDB目录下创建db和log两个文件夹 ...
- PHP的安装,编译,扩展工具
1.基本容易混淆的概念 pecl php的社区贡献扩展库,全称为PHP Extension Community Library, 是php的底层库, 使用C语言编写 pear php的应用扩展库,全称 ...
- ADOquery属性中cursortype,LockType属性
ADOquery属性中cursortype属性 ctOpenForwardOnly 向前移动 - — 除了只能在记录集中向前移动以外,其它的和动态游标类似. ctKeyset 键集 ...