无人驾驶——4.控制之MPC模型预测控制
源自:《无人驾驶无人驾驶车辆模型预测控制》——龚建伟
参考:https://wenku.baidu.com/view/8e4633d519e8b8f67c1cb9fa.html
0.车辆模型

汽车的车轮转角为δf
分别做垂直于后轮和前轮的射线,这两根射线会交于O点,两轮模型会绕O点进行运动,在短时间dt内,可以认为O点不动。连接O点和汽车的质心成一条线段,实际汽车的运动方向v将垂直于该线段。运动方向ψ与车身方向所成的夹角β,这个角度一般称为偏航角。
β 可以由如下公式计算求得
假设t时刻的汽车的状态为xt,yt,经过dt时间后的t+1时刻,状态为xt+1,yt+1,则他们之间的关系为

根据以上理论即可在丢失定位信息后的短时间内,依靠自身的传感器信息,进行位置和位姿估计。
1.基本原理
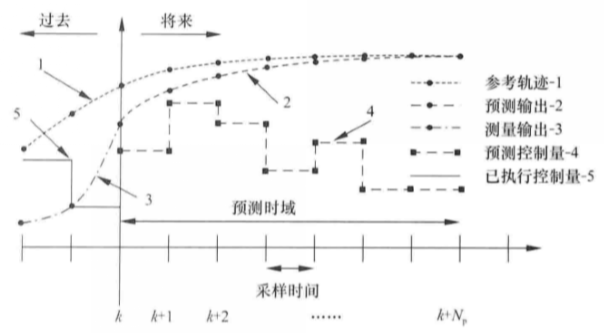
已知(输入):一条期望参考轨迹;当前k时刻的测量值;
设计:预测模型
目标:预测未来一段时域内[k,k+Np],系统的输出
方法:对这段时域内施加一系列控制序列4(k+1时刻的值为实际控制量)
总结起来就是:预测模型;滚动优化;反馈校正
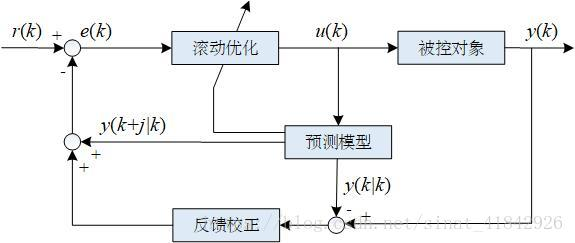
2.控制原理框图
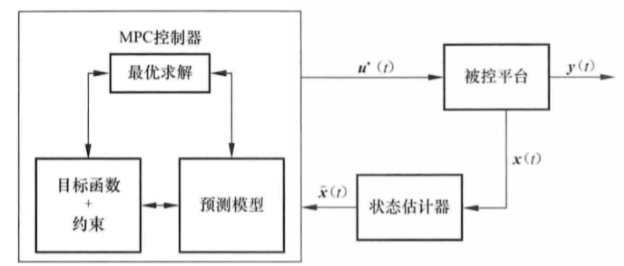
控制过程:
- 预测模型+目标函数+约束条件——>最优控制序列——>被控平台
- 被控平台响应
- 获取状态观测值x(t)——>状态估计器(卡尔曼滤波器、粒子滤波等)——>回到第一步,循环
3.常用模型
3.1 动态矩阵控制DMC
3.2 模型算法控制MAC
3.3 广义预测控制GPC
4.模型算法控制 MAC
参考:https://www.cnblogs.com/yrm1160029237/p/10087315.html
http://www.docin.com/p-1186007480.html
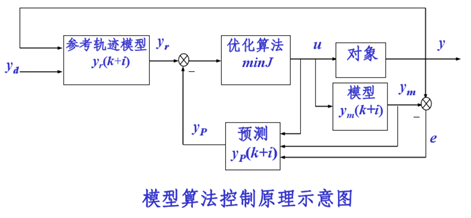
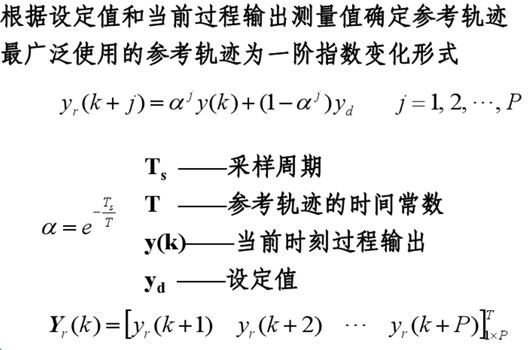
目的:使系统的输出沿着预先给定的参考轨迹逐渐到达设定值。
算法组成:预测模型、反馈校正、参考轨迹、滚动优化
其预测模型输出由两部分组成:过去已知控制量产生的预测模型输出、由现在和未来控制量产生的预测模型输出。
4.1 MAC算法原理图

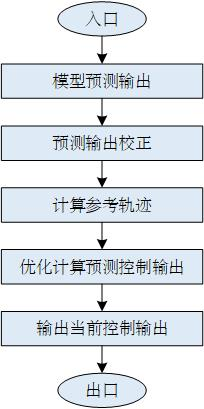
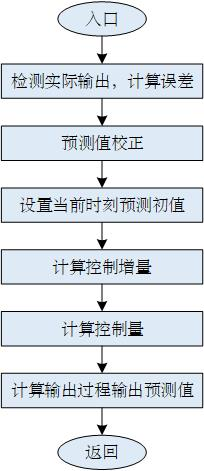
4.2 MAC在线计算程序流程图
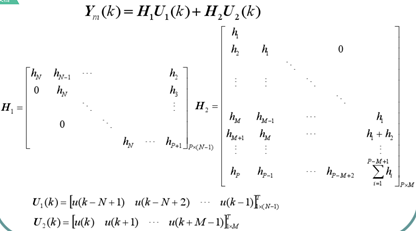
1.模型
- 预测模型:
 ,P-预测时域;
,P-预测时域;
假设:
 ,M—控制时域
,M—控制时域
于是,P步预测值:

从而:
- 反馈校正
当前过程的测量值-模型计算值的差,来修正:

- 设定值(目标点)跟踪——>参考轨迹
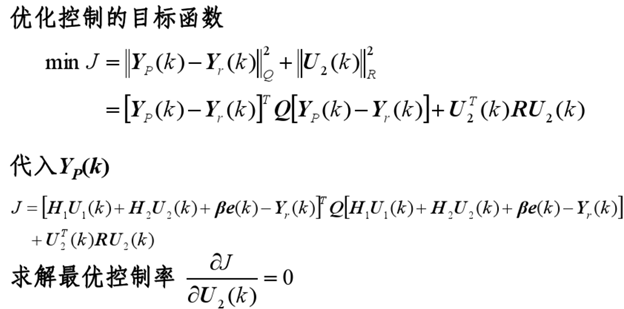
- 最优控制

5.动态矩阵控制 DMC
算法组成:阶跃响应模型预测、反馈校正、滚动优化
其预测模型输出由两部分组成:待求解的未知控制增量产生的输出值、过去控制量产生的已知输出初值。
DMC算法原理图:
DMC在线计算程序流程图:
MPC算法的特点
模型要求不高,不需要深入的了解过程内部机理;
适用约束条件、大纯滞后、非最小相位及非线性等过程;
滚动优化策略能弥补外部因素引起的不确定性,动态性能较好;
缺点:不能描述不稳定系统,不适用于不稳定对象;系统模型在线辨识比较困难。
参考:https://blog.csdn.net/sinat_41842926/article/details/82995065
6.滚动优化
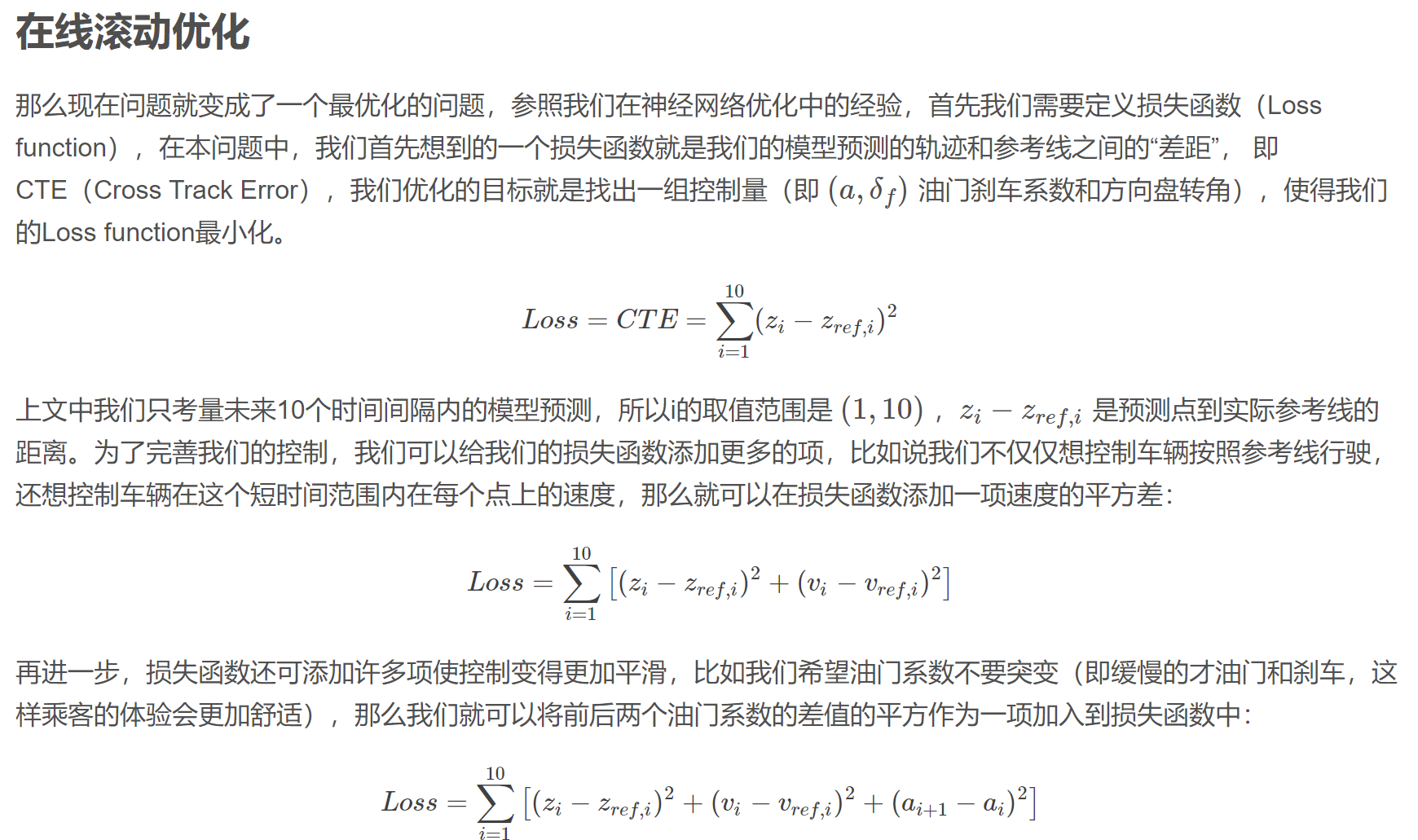
参考:https://blog.csdn.net/AdamShan/article/details/79083755
7.反馈校正
7.1 KF/EFK
7.2 粒子滤波

无人驾驶——4.控制之MPC模型预测控制的更多相关文章
- 【控制】模型预测控制 MPC 【合集】Model Predictive Control
1.模型预测控制--运动学模型 2.模型预测控制--模型线性化 3.模型预测控制--模型离散化 4.模型预测控制--预测 5.模型预测控制--控制律优化二次型优化 6.模型预测控制--反馈控制 7.模 ...
- 一个模型预测控制(MPC)的简单实现
1 生活中的启示 情景如下:你们团队每天早晨开一次例会,主要会议内容是你汇报工作进度,领导根据工作目标和工作进度,制定当天的工作计划,你领到工作计划后开始工作.每天都这样周而复始,从领导的角度看,这件 ...
- MATLAB模型预测控制(MPC,Model Predictive Control)
模型预测控制是一种基于模型的闭环优化控制策略. 预测控制算法的三要素:内部(预测)模型.参考轨迹.控制算法.现在一般则更清楚地表述为内部(预测)模型.滚动优化.反馈控制. 大量的预测控制权威性文献都无 ...
- 再探 Ext JS 6 (sencha touch/ext升级版) 变化篇 (编译命令、滚动条、控制层、模型层、路由)
从sencha touch 2.4.2升级到ext js 6,cmd版本升级到6.0之后发生了很多变化 首先从cmd说起,cmd 6 中sencha app build package不能使用了,se ...
- 模型预测控制(MPC)简介
1.引言 在当今过程控制中,PID当然是用的最多的控制方法,但MPC也超过了10%的占有率.MPC是一个总称,有着各种各样的算法.其动态矩阵控制(DMC)是代表作.DMC采用的是系统的阶跃响应曲线,其 ...
- 模型预测控制 MPC
使用MPC的原因:
- OpenSceneGraph控制模型
OpenSceneGraph控制模型 转自:http://www.cppblog.com/eryar/archive/2012/05/28/176538.html 一.简介 对模型的控制就是修改模型的 ...
- 百度Apollo无人驾驶入门课程下载
本文提供 百度Apollo官网的无人驾驶入门课程下载,主要为视频文件. 视频数量:101个:文件格式:MP4:视频总时长:2小时40分钟:文件总大小:约1.13GB: 马上下载 关注公众号罗孚传说(R ...
- Apollo代码学习(七)—MPC与LQR比较
前言 Apollo中用到了PID.MPC和LQR三种控制器,其中,MPC和LQR控制器在状态方程的形式.状态变量的形式.目标函数的形式等有诸多相似之处,因此结合自己目前了解到的信息,将两者进行一定的比 ...
随机推荐
- python直接赋值,浅拷贝和深拷贝
本文参考自<Python 直接赋值.浅拷贝和深度拷贝解析> 定义 直接赋值:就是对象的引用(别名) 浅拷贝(copy):拷贝父对象,不拷贝对象内部的子对象 深拷贝(deepcopy):co ...
- Mybatis_总结_05_用_Java API
一.前言 使用 MyBatis 的主要 Java 接口就是 SqlSession.你可以通过这个接口来执行命令,获取映射器和管理事务. 二.主要类 (1)SqlSession 是由 SqlSessio ...
- python的单例模式--解决多线程的单例模式失效
单例模式 单例模式(Singleton Pattern) 是一种常用的软件设计模式,主要目的是确保某一个类只有一个实例存在.希望在整个系统中,某个类只能出现一个实例时,单例对象就能派上用场 比如,某个 ...
- sql-多表查询JOIN与分组GROUP BY
一.内部连接:两个表的关系是平等的,可以从两个表中获取数据.用ON表示连接条件 SELECT A.a,B.b FROM At AS A INNER JOINT Bt AS B ON A.m=B.n ...
- 15_游戏编程模式EventQueue
#### 两个例子 .GUI event loop ``` while (running) { // 从事件队列里获取一个事件 Event event = getNextEvent(); // Han ...
- GET请求与POST请求区别
GET请求与POST请求区别 a:语义: GET:客户端想获取服务器资源 POST:客户端想传递数据给服务器 b:安全级: GET:不安全 POST:不安全 c:数据长度 GET:客户端发送数据最长1 ...
- 基于RTP协议的H.264传输
1. 引言 随 着信息产业的发展,人们对信息资源的要求已经逐渐由文字和图片过渡到音频和视频,并越来越强调获取资源的实时性和互动性.但人们又面临着另外一种不可避免 的尴尬,就是在网络上看 ...
- UVA - 1608 Non-boring sequences (分治,中途相遇法)
如果一个序列中是否存在一段连续子序列中的每个元素在该子序列中都出现了至少两次,那么这个序列是无聊的,反正则不无聊.给你一个长度为n(n<=200000)的序列,判断这个序列是否无聊. 稀里糊涂A ...
- HDU 5776
题目链接:http://acm.hdu.edu.cn/showproblem.php?pid=5776 求是否有区间的和是m的倍数 预处理前缀和,一旦有两个数模m的值相同,说明中间一部分连续子列可以组 ...
- hdu2188 Check Corners
Check Corners Time Limit: 2000/10000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others)To ...