无人驾驶——4.控制之MPC模型预测控制
源自:《无人驾驶无人驾驶车辆模型预测控制》——龚建伟
参考:https://wenku.baidu.com/view/8e4633d519e8b8f67c1cb9fa.html
0.车辆模型

汽车的车轮转角为δf
分别做垂直于后轮和前轮的射线,这两根射线会交于O点,两轮模型会绕O点进行运动,在短时间dt内,可以认为O点不动。连接O点和汽车的质心成一条线段,实际汽车的运动方向v将垂直于该线段。运动方向ψ与车身方向所成的夹角β,这个角度一般称为偏航角。
β 可以由如下公式计算求得
假设t时刻的汽车的状态为xt,yt,经过dt时间后的t+1时刻,状态为xt+1,yt+1,则他们之间的关系为

根据以上理论即可在丢失定位信息后的短时间内,依靠自身的传感器信息,进行位置和位姿估计。
1.基本原理
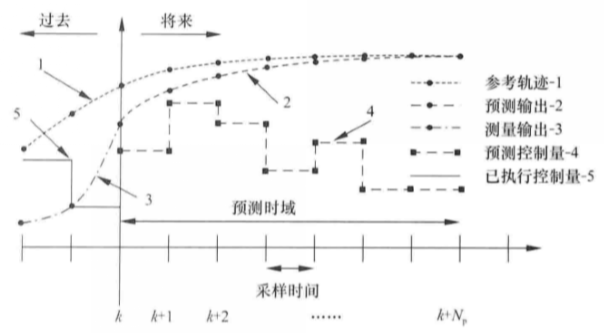
已知(输入):一条期望参考轨迹;当前k时刻的测量值;
设计:预测模型
目标:预测未来一段时域内[k,k+Np],系统的输出
方法:对这段时域内施加一系列控制序列4(k+1时刻的值为实际控制量)
总结起来就是:预测模型;滚动优化;反馈校正
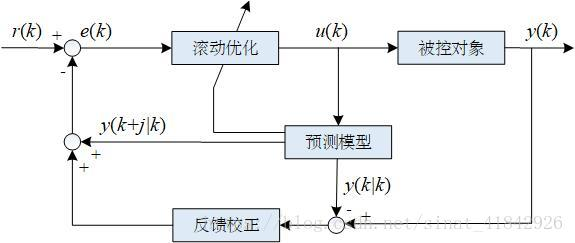
2.控制原理框图
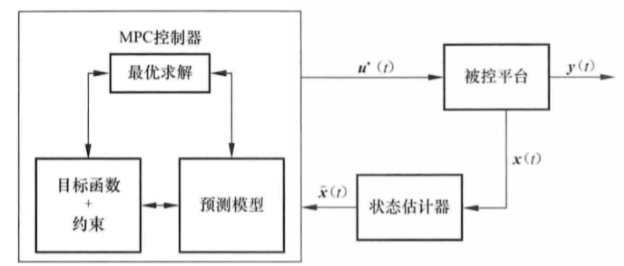
控制过程:
- 预测模型+目标函数+约束条件——>最优控制序列——>被控平台
- 被控平台响应
- 获取状态观测值x(t)——>状态估计器(卡尔曼滤波器、粒子滤波等)——>回到第一步,循环
3.常用模型
3.1 动态矩阵控制DMC
3.2 模型算法控制MAC
3.3 广义预测控制GPC
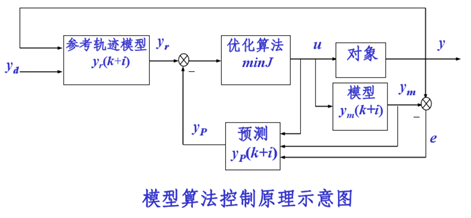
4.模型算法控制 MAC
参考:https://www.cnblogs.com/yrm1160029237/p/10087315.html
http://www.docin.com/p-1186007480.html
目的:使系统的输出沿着预先给定的参考轨迹逐渐到达设定值。
算法组成:预测模型、反馈校正、参考轨迹、滚动优化
其预测模型输出由两部分组成:过去已知控制量产生的预测模型输出、由现在和未来控制量产生的预测模型输出。
4.1 MAC算法原理图

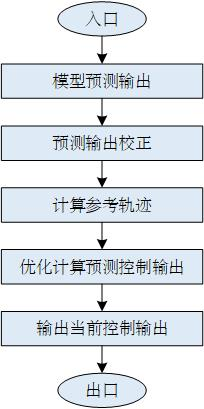
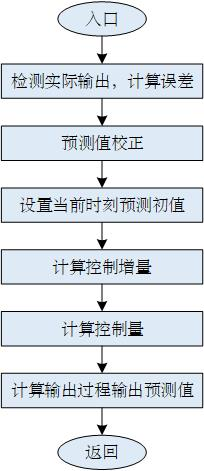
4.2 MAC在线计算程序流程图
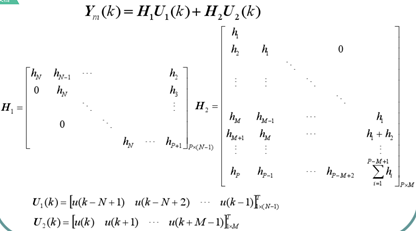
1.模型
- 预测模型:
 ,P-预测时域;
,P-预测时域;
假设:
 ,M—控制时域
,M—控制时域
于是,P步预测值:

从而:
- 反馈校正
当前过程的测量值-模型计算值的差,来修正:

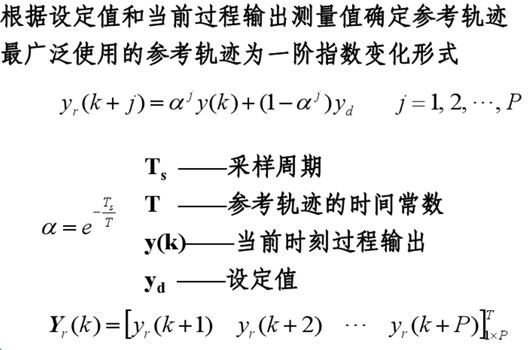
- 设定值(目标点)跟踪——>参考轨迹
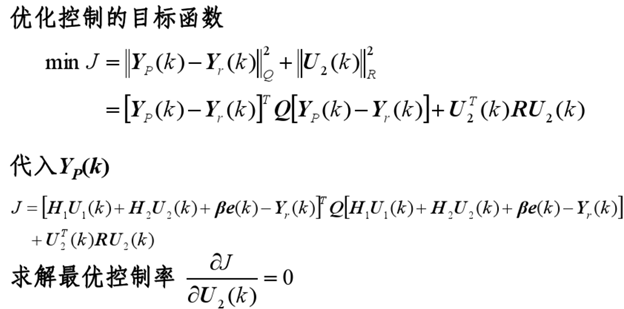
- 最优控制

5.动态矩阵控制 DMC
算法组成:阶跃响应模型预测、反馈校正、滚动优化
其预测模型输出由两部分组成:待求解的未知控制增量产生的输出值、过去控制量产生的已知输出初值。
DMC算法原理图:
DMC在线计算程序流程图:
MPC算法的特点
模型要求不高,不需要深入的了解过程内部机理;
适用约束条件、大纯滞后、非最小相位及非线性等过程;
滚动优化策略能弥补外部因素引起的不确定性,动态性能较好;
缺点:不能描述不稳定系统,不适用于不稳定对象;系统模型在线辨识比较困难。
参考:https://blog.csdn.net/sinat_41842926/article/details/82995065
6.滚动优化
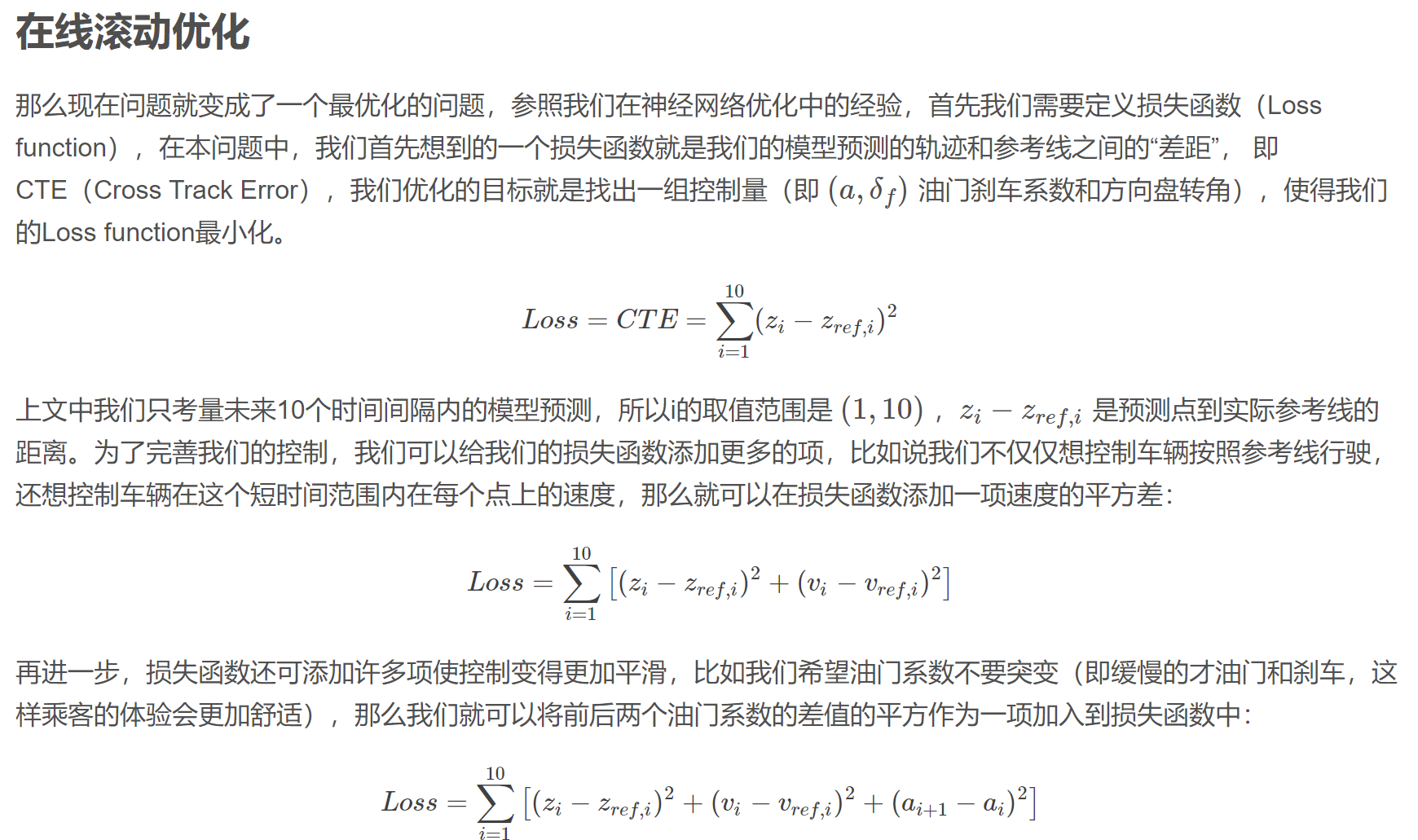
参考:https://blog.csdn.net/AdamShan/article/details/79083755
7.反馈校正
7.1 KF/EFK
7.2 粒子滤波

无人驾驶——4.控制之MPC模型预测控制的更多相关文章
- 【控制】模型预测控制 MPC 【合集】Model Predictive Control
1.模型预测控制--运动学模型 2.模型预测控制--模型线性化 3.模型预测控制--模型离散化 4.模型预测控制--预测 5.模型预测控制--控制律优化二次型优化 6.模型预测控制--反馈控制 7.模 ...
- 一个模型预测控制(MPC)的简单实现
1 生活中的启示 情景如下:你们团队每天早晨开一次例会,主要会议内容是你汇报工作进度,领导根据工作目标和工作进度,制定当天的工作计划,你领到工作计划后开始工作.每天都这样周而复始,从领导的角度看,这件 ...
- MATLAB模型预测控制(MPC,Model Predictive Control)
模型预测控制是一种基于模型的闭环优化控制策略. 预测控制算法的三要素:内部(预测)模型.参考轨迹.控制算法.现在一般则更清楚地表述为内部(预测)模型.滚动优化.反馈控制. 大量的预测控制权威性文献都无 ...
- 再探 Ext JS 6 (sencha touch/ext升级版) 变化篇 (编译命令、滚动条、控制层、模型层、路由)
从sencha touch 2.4.2升级到ext js 6,cmd版本升级到6.0之后发生了很多变化 首先从cmd说起,cmd 6 中sencha app build package不能使用了,se ...
- 模型预测控制(MPC)简介
1.引言 在当今过程控制中,PID当然是用的最多的控制方法,但MPC也超过了10%的占有率.MPC是一个总称,有着各种各样的算法.其动态矩阵控制(DMC)是代表作.DMC采用的是系统的阶跃响应曲线,其 ...
- 模型预测控制 MPC
使用MPC的原因:
- OpenSceneGraph控制模型
OpenSceneGraph控制模型 转自:http://www.cppblog.com/eryar/archive/2012/05/28/176538.html 一.简介 对模型的控制就是修改模型的 ...
- 百度Apollo无人驾驶入门课程下载
本文提供 百度Apollo官网的无人驾驶入门课程下载,主要为视频文件. 视频数量:101个:文件格式:MP4:视频总时长:2小时40分钟:文件总大小:约1.13GB: 马上下载 关注公众号罗孚传说(R ...
- Apollo代码学习(七)—MPC与LQR比较
前言 Apollo中用到了PID.MPC和LQR三种控制器,其中,MPC和LQR控制器在状态方程的形式.状态变量的形式.目标函数的形式等有诸多相似之处,因此结合自己目前了解到的信息,将两者进行一定的比 ...
随机推荐
- linux服务器应用NTP配置时间同步
linux服务器应用NTP配置时间同步 • 为什么建议使用ntpd而不是ntpdate? #####原因很简单,ntpd是步进式的逐渐调整时间,而ntpdate是断点更新,比如现在服务器时间是9.18 ...
- Jquery过滤选择器,选择前几个元素,后几个元素,内容过滤选择器等
一.基本过滤选择器(重点掌握下列八个):first 选取第一个元素 $("div:first").css("color","red");:l ...
- 1.Linux和Unix区别
整理来源于网络:http://blog.csdn.net/xiaojianpitt/article/details/6377419 有很多初学Linux的人比较关心Linux和windows的区别,这 ...
- weinre
https://www.cnblogs.com/diva/p/3995674.html
- THUPC2017 小 L 的计算题
求 $k=1,2,\cdots,n \space \space \sum\limits_{i=1}^n a_i^k$ $n \leq 2 \times 10^5$ sol: 时隔多年终于卡过去了 之前 ...
- HDU 5776
题目链接:http://acm.hdu.edu.cn/showproblem.php?pid=5776 求是否有区间的和是m的倍数 预处理前缀和,一旦有两个数模m的值相同,说明中间一部分连续子列可以组 ...
- mysql_union all 纵向合并建表_20170123
年前事情比较多,博客不能每天更新了. 1.union all 纵向建表和left join 横向建表的数据结构区别 先贴代码 后面再补充 (#销售确认额 SELECT '05收货销售额' AS 标识, ...
- SQL Sever 学习系列之二
SQL Sever 学习系列之二 SQL Server 学习系列之一(薪酬方案+基础) 四.有关时间输出问题 select GETDATE() 日期时间 ----显示为:2013-07 ...
- ExtJs中获得当前选中行号(Grid中多选或者是单选)及Grid的反选(取消选中行)
多选,如何获得每行的行号: function getlineNum(){ var sm=titleGird.getSelectionModel(); // 获得grid的SelectionMod ...
- echo 的部分用法
echo “内容” > 文件名 (会覆盖文件里的所有内容) echo “内容” >> 文件名 (追加内容到文件里,会另起一行写入) 如果您阅读过此文章有所收获,请为我顶一个,如果文章 ...