Linux之V4L2基础编程【转】
转自:https://www.cnblogs.com/emouse/archive/2013/03/04/2943243.html
本文内容来源于网络,本博客进行整理。
1. 定义
V4L2(Video For Linux Two) 是内核提供给应用程序访问音、视频驱动的统一接口。
2. 工作流程:
打开设备-> 检查和设置设备属性-> 设置帧格式-> 设置一种输入输出方法(缓冲 区管理)-> 循环获取数据-> 关闭设备。
3. 设备的打开和关闭:
#include <fcntl.h> int open(const char *device_name, int flags); #include <unistd.h> int clo se(int fd);
例:
int fd=open(“/dev/video0”,O_RDWR); // 打开设备 close(fd); // 关闭设备
注意:V4L2 的相关定义包含在头文件<linux/videodev2.h> 中.
4. 查询设备属性: VIDIOC_QUERYCAP
相关函数:
int ioctl(int fd, int request, struct v4l2_capability *argp);
相关结构体:

struct v4l2_capability
{
u8 driver[16]; // 驱动名字
u8 card[32]; // 设备名字
u8 bus_info[32]; // 设备在系统中的位置
u32 version; // 驱动版本号
u32 capabilities; // 设备支持的操作
u32 reserved[4]; // 保留字段
};
capabilities 常用值:
V4L2_CAP_VIDEO_CAPTURE // 是否支持图像获取
例:显示设备信息
struct v4l2_capability cap; ioctl(fd,VIDIOC_QUERYCAP,&cap); printf(“Driver Name:%s\nCard Name:%s\nBus info:%s\nDriver Version:%u.%u.%u\n”,cap.driver,cap.card,cap.bus_info,(cap.version>>16)&0XFF, (cap.version>>8)&0XFF,cap.version&0XFF);
5. 设置视频的制式和帧格式
制式包括PAL,NTSC,帧的格式个包括宽度和高度等。
相关函数:
int ioctl(int fd, int request, struct v4l2_fmtdesc *argp); int ioctl(int fd, int request, struct v4l2_format *argp);
相关结构体:
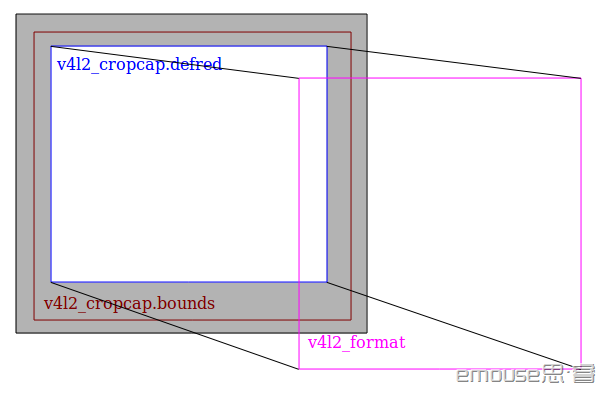
v4l2_cropcap 结构体用来设置摄像头的捕捉能力,在捕捉上视频时应先先设置
v4l2_cropcap 的 type 域,再通过 VIDIO_CROPCAP 操作命令获取设备捕捉能力的参数,保存于 v4l2_cropcap 结构体中,包括 bounds(最大捕捉方框的左上角坐标和宽高),defrect
(默认捕捉方框的左上角坐标和宽高)等。
v4l2_format 结构体用来设置摄像头的视频制式、帧格式等,在设置这个参数时应先填 好 v4l2_format 的各个域,如 type(传输流类型),fmt.pix.width(宽),
fmt.pix.heigth(高),fmt.pix.field(采样区域,如隔行采样),fmt.pix.pixelformat(采
样类型,如 YUV4:2:2),然后通过 VIDIO_S_FMT 操作命令设置视频捕捉格式。如下图所示:
5.1 查询并显示所有支持的格式:VIDIOC_ENUM_FMT
相关函数:
int ioctl(int fd, int request, struct v4l2_fmtdesc *argp);
相关结构体:
struct v4l2_fmtdesc
{
u32 index; // 要查询的格式序号,应用程序设置
enum v4l2_buf_type type; // 帧类型,应用程序设置
u32 flags; // 是否为压缩格式
u8 description[32]; // 格式名称
u32 pixelformat; // 格式
u32 reserved[4]; // 保留
};
例:显示所有支持的格式
struct v4l2_fmtdesc fmtdesc; fmtdesc.index=0; fmtdesc.type=V4L2_BUF_TYPE_VIDEO_CAPTURE; printf("Support format:\n");
while(ioctl(fd, VIDIOC_ENUM_FMT, &fmtdesc) != -1)
{
printf("\t%d.%s\n",fmtdesc.index+1,fmtdesc.description);
fmtdesc.index++;
}
5.2 查看或设置当前格式: VIDIOC_G_FMT, VIDIOC_S_FMT
检查是否支持某种格式:VIDIOC_TRY_FMT
相关函数:
int ioctl(int fd, int request, struct v4l2_format *argp);
相关结构体:
struct v4l2_format
{
enum v4l2_buf_type type; // 帧类型,应用程序设置
union fmt
{
struct v4l2_pix_format pix; // 视频设备使用
struct v4l2_window win;
struct v4l2_vbi_format vbi;
struct v4l2_sliced_vbi_format sliced;
u8 raw_data[200];
};
};
struct v4l2_pix_format
{
u32 width; // 帧宽,单位像素
u32 height; // 帧高,单位像素
u32 pixelformat; // 帧格式
enum v4l2_field field;
u32 bytesperline;
u32 sizeimage;
enum v4l2_colorspace colorspace;
u32 priv;
};
例:显示当前帧的相关信息
struct v4l2_format fmt; fmt.type=V4L2_BUF_TYPE_VIDEO_CAPTURE; ioctl(fd, VIDIOC_G_FMT, &fmt);
printf(“Current data format information:\n\twidth:%d\n\theight:%d\n”,
fmt.fmt.pix.width,fmt.fmt.pix.height);
struct v4l2_fmtdesc fmtdesc; fmtdesc.index=0; fmtdesc.type=V4L2_BUF_TYPE_VIDEO_CAPTURE; while(ioctl(fd,VIDIOC_ENUM_FMT,&fmtdesc)!=-1)
{
if(fmtdesc.pixelformat & fmt.fmt.pix.pixelformat)
{
printf(“\tformat:%s\n”,fmtdesc.description);
break;
}
fmtdesc.index++;
}
例:检查是否支持某种帧格式
struct v4l2_format fmt; fmt.type=V4L2_BUF_TYPE_VIDEO_CAPTURE; fmt.fmt.pix.pixelformat=V4L2_PIX_FMT_RGB32; if(ioctl(fd,VIDIOC_TRY_FMT,&fmt)==-1) if(errno==EINVAL) printf(“not support format RGB32!\n”);
6. 图像的缩放 VIDIOC_CROPCAP
相关函数:
int ioctl(int fd, int request, struct v4l2_cropcap *argp); int ioctl(int fd, int request, struct v4l2_crop *argp); int ioctl(int fd, int request, const struct v4l2_crop *argp);
相关结构体:
Cropping 和 scaling 主要指的是图像的取景范围及图片的比例缩放的支持。Crop 就 是把得到的数据作一定的裁剪和伸缩,裁剪可以只取样我们可以得到的图像大小的一部分, 剪裁的主要参数是位置、长度、宽度。而 scale 的设置是通过 VIDIOC_G_FMT 和 VIDIOC_S_FMT 来获得和设置当前的 image 的长度,宽度来实现的。看下图
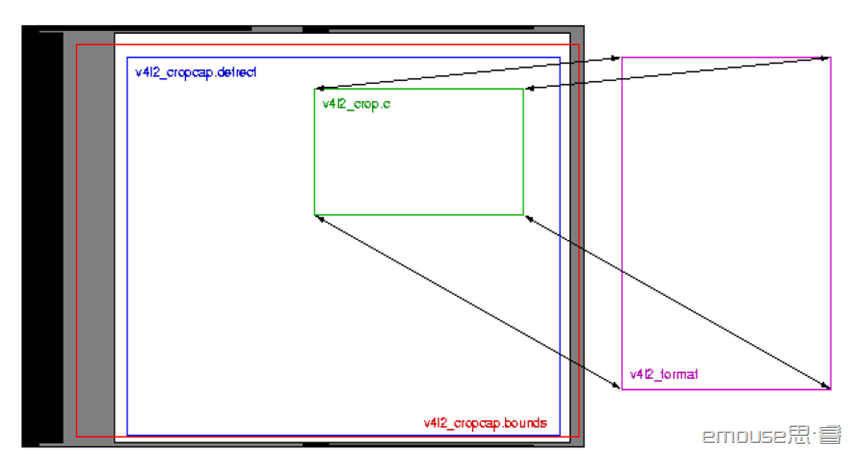
我们可以假设 bounds 是 sensor 最大能捕捉到的图像范围,而 defrect 是设备默认 的最大取样范围,这个可以通过 VIDIOC_CROPCAP 的 ioctl 来获得设备的 crap 相关的属 性 v4l2_cropcap,其中的 bounds 就是这个 bounds,其实就是上限。每个设备都有个默 认的取样范围,就是 defrect,就是 default rect 的意思,它比 bounds 要小一些。这 个范围也是通过 VIDIOC_CROPCAP 的 ioctl 来获得的 v4l2_cropcap 结构中的 defrect 来表示的,我们可以通过 VIDIOC_G_CROP 和 VIDIOC_S_CROP 来获取和设置设备当前的 crop 设置。
6.1 设置设备捕捉能力的参数
相关函数:
int ioctl(int fd, int request, struct v4l2_cropcap *argp);
相关结构体:
struct v4l2_cropcap
{
enum v4l2_buf_type type; // 数据流的类型,应用程序设置
struct v4l2_rect bounds; // 这是 camera 的镜头能捕捉到的窗口大小的局限
struct v4l2_rect defrect; // 定义默认窗口大小,包括起点位置及长,宽的大小,大小以像素为单位
struct v4l2_fract pixelaspect; // 定义了图片的宽高比
};
6.2 设置窗口取景参数 VIDIOC_G_CROP 和 VIDIOC_S_CROP
相关函数:
int ioctl(int fd, int request, struct v4l2_crop *argp); int ioctl(int fd, int request, const struct v4l2_crop *argp);
相关结构体:
struct v4l2_crop
{
enum v4l2_buf_type type;// 应用程序设置
struct v4l2_rect c;
}
7.video Inputs and Outputs
VIDIOC_G_INPUT 和 VIDIOC_S_INPUT 用来查询和选则当前的 input,一个 video 设备 节点可能对应多个视频源,比如 saf7113 可以最多支持四路 cvbs 输入,如果上层想在四 个cvbs视频输入间切换,那么就要调用 ioctl(fd, VIDIOC_S_INPUT, &input) 来切换。
VIDIOC_G_INPUT and VIDIOC_G_OUTPUT 返回当前的 video input和output的index.
相关函数:
int ioctl(int fd, int request, struct v4l2_input *argp);
相关结构体:
struct v4l2_input {
__u32 index; /* Which input */
__u8 name[32]; /* Label */
__u32 type; /* Type of input */
__u32 audioset; /* Associated audios (bitfield) */
__u32 tuner; /* Associated tuner */
v4l2_std_id std;
__u32 status;
__u32 reserved[4];
};
我们可以通过VIDIOC_ENUMINPUT and VIDIOC_ENUMOUTPUT 分别列举一个input或者 output的信息,我们使用一个v4l2_input结构体来存放查询结果,这个结构体中有一个 index域用来指定你索要查询的是第几个input/ouput,如果你所查询的这个input是当前正 在使用的,那么在v4l2_input还会包含一些当前的状态信息,如果所 查询的input/output 不存在,那么回返回EINVAL错误,所以,我们通过循环查找,直到返回错误来遍历所有的 input/output. VIDIOC_G_INPUT and VIDIOC_G_OUTPUT 返回当前的video input和output 的index.
例: 列举当前输入视频所支持的视频格式
struct v4l2_input input;
struct v4l2_standard standard;
memset (&input, 0, sizeof (input));
//首先获得当前输入的 index,注意只是 index,要获得具体的信息,就的调用列举操作
if (-1 == ioctl (fd, VIDIOC_G_INPUT, &input.index)) {
perror (”VIDIOC_G_INPUT”);
exit (EXIT_FAILURE);
}
//调用列举操作,获得 input.index 对应的输入的具体信息
if (-1 == ioctl (fd, VIDIOC_ENUMINPUT, &input)) {
perror (”VIDIOC_ENUM_INPUT”);
exit (EXIT_FAILURE);
}
printf (”Current input %s supports:\n”, input.name); memset (&standard, 0, sizeof (standard)); standard.index = 0;
//列举所有的所支持的 standard,如果 standard.id 与当前 input 的 input.std 有共同的
bit flag,意味着当前的输入支持这个 standard,这样将所有驱动所支持的 standard 列举一个
遍,就可以找到该输入所支持的所有 standard 了。
while (0 == ioctl (fd, VIDIOC_ENUMSTD, &standard)) {
if (standard.id & input.std)
printf (”%s\n”, standard.name);
standard.index++;
}
/* EINVAL indicates the end of the enumeration, which cannot be empty unless this device falls under the USB exception. */
if (errno != EINVAL || standard.index == 0) {
perror (”VIDIOC_ENUMSTD”);
exit (EXIT_FAILURE);
}
8. Video standards
相关函数:
v4l2_std_id std_id; //这个就是个64bit得数 int ioctl(int fd, int request, struct v4l2_standard *argp);
相关结构体:
typedef u64 v4l2_std_id;
struct v4l2_standard {
u32 index;
v4l2_std_id id;
u8 name[24];
struct v4l2_fract frameperiod; /* Frames, not fields */
u32 framelines;
u32 reserved[4];
};
当然世界上现在有多个视频标准,如NTSC和PAL,他们又细分为好多种,那么我们的设 备输入/输出究竟支持什么样的标准呢?我们的当前在使用的输入和输出正在使用的是哪 个标准呢?我们怎么设置我们的某个输入输出使用的标准呢?这都是有方法的。
查询我们的输入支持什么标准,首先就得找到当前的这个输入的index,然后查出它的 属性,在其属性里面可以得到该输入所支持的标准,将它所支持的各个标准与所有的标准 的信息进行比较,就可以获知所支持的各个标准的属性。一个输入所支持的标准应该是一 个集合,而这个集合是用bit与的方式用一个64位数字表示。因此我们所查到的是一个数字。
Example: Information about the current video standard v4l2_std_id std_id; //这个就是个64bit得数
struct v4l2_standard standard;
// VIDIOC_G_STD就是获得当前输入使用的standard,不过这里只是得到了该标准的id
// 即flag,还没有得到其具体的属性信息,具体的属性信息要通过列举操作来得到。
if (-1 == ioctl (fd, VIDIOC_G_STD, &std_id)) { //获得了当前输入使用的standard
// Note when VIDIOC_ENUMSTD always returns EINVAL this is no video device
// or it falls under the USB exception, and VIDIOC_G_STD returning EINVAL
// is no error.
perror (”VIDIOC_G_STD”);
exit (EXIT_FAILURE);
}
memset (&standard, 0, sizeof (standard));
standard.index = 0; //从第一个开始列举
// VIDIOC_ENUMSTD用来列举所支持的所有的video标准的信息,不过要先给standard
// 结构的index域制定一个数值,所列举的标 准的信息属性包含在standard里面,
// 如果我们所列举的标准和std_id有共同的bit,那么就意味着这个标准就是当前输
// 入所使用的标准,这样我们就得到了当前输入使用的标准的属性信息
while (0 == ioctl (fd, VIDIOC_ENUMSTD, &standard)) {
if (standard.id & std_id) {
printf (”Current video standard: %s\n”, standard.name);
exit (EXIT_SUCCESS);
}
standard.index++;
}
/* EINVAL indicates the end of the enumeration, which cannot be empty unless this device falls under the USB exception. */
if (errno == EINVAL || standard.index == 0) {
perror (”VIDIOC_ENUMSTD”);
exit (EXIT_FAILURE);
}
9. 申请和管理缓冲区
应用程序和设备有三种交换数据的方法,直接 read/write、内存映射(memory mapping)
和用户指针。这里只讨论内存映射(memory mapping)。
9.1 向设备申请缓冲区 VIDIOC_REQBUFS
相关函数:
int ioctl(int fd, int request, struct v4l2_requestbuffers *argp);
相关结构体:
struct v4l2_requestbuffers
{
u32 count; // 缓冲区内缓冲帧的数目
enum v4l2_buf_type type; // 缓冲帧数据格式
enum v4l2_memory memory; // 区别是内存映射还是用户指针方式
u32 reserved[2];
};
注:enum v4l2_memoy
{
V4L2_MEMORY_MMAP, V4L2_MEMORY_USERPTR
};
//count,type,memory 都要应用程序设置
例:申请一个拥有四个缓冲帧的缓冲区
struct v4l2_requestbuffers req; req.count=4; req.type=V4L2_BUF_TYPE_VIDEO_CAPTURE; req.memory=V4L2_MEMORY_MMAP; ioctl(fd,VIDIOC_REQBUFS,&req);
9.2 获取缓冲帧的地址,长度:VIDIOC_QUERYBUF
相关函数:
int ioctl(int fd, int request, struct v4l2_buffer *argp);
相关结构体:
struct v4l2_buffer
{
u32 index; //buffer 序号
enum v4l2_buf_type type; //buffer 类型
u32 byteused; //buffer 中已使用的字节数
u32 flags; // 区分是MMAP 还是USERPTR
enum v4l2_field field;
struct timeval timestamp; // 获取第一个字节时的系统时间
struct v4l2_timecode timecode;
u32 sequence; // 队列中的序号
enum v4l2_memory memory; //IO 方式,被应用程序设置
union m
{
u32 offset; // 缓冲帧地址,只对MMAP 有效
unsigned long userptr;
};
u32 length; // 缓冲帧长度
u32 input;
u32 reserved;
};
9.3 内存映射MMAP 及定义一个结构体来映射每个缓冲帧。 相关结构体:
struct buffer
{
void* start;
unsigned int length;
}*buffers;
相关函数:
#include <sys/mman.h> void *mmap(void *addr, size_t length, int prot, int flags, int fd, off_t offset)
//addr 映射起始地址,一般为NULL ,让内核自动选择
//length 被映射内存块的长度
//prot 标志映射后能否被读写,其值为PROT_EXEC,PROT_READ,PROT_WRITE, PROT_NONE
//flags 确定此内存映射能否被其他进程共享,MAP_SHARED,MAP_PRIVATE
//fd,offset, 确定被映射的内存地址 返回成功映射后的地址,不成功返回MAP_FAILED ((void*)-1)
相关函数:
int munmap(void *addr, size_t length);// 断开映射
//addr 为映射后的地址,length 为映射后的内存长度
例:将四个已申请到的缓冲帧映射到应用程序,用buffers 指针记录。
buffers = (buffer*)calloc (req.count, sizeof (*buffers));
if (!buffers) {
// 映射
fprintf (stderr, "Out of memory/n");
exit (EXIT_FAILURE);
}
for (unsigned int n_buffers = 0; n_buffers < req.count; ++n_buffers)
{
struct v4l2_buffer buf;
memset(&buf,0,sizeof(buf));
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = n_buffers;
// 查询序号为n_buffers 的缓冲区,得到其起始物理地址和大小
if (-1 == ioctl (fd, VIDIOC_QUERYBUF, &buf))
exit(-1);
buffers[n_buffers].length = buf.length;
// 映射内存
buffers[n_buffers].start =mmap (NULL,buf.length,PROT_READ | PROT_WRITE ,MAP_SHARED,fd, buf.m.offset);
if (MAP_FAILED == buffers[n_buffers].start)
exit(-1);
}
10. 缓冲区处理好之后,就可以开始获取数据了
10.1 启动 或 停止数据流 VIDIOC_STREAMON, VIDIOC_STREAMOFF
int ioctl(int fd, int request, const int *argp);
//argp 为流类型指针,如V4L2_BUF_TYPE_VIDEO_CAPTURE.
10.2 在开始之前,还应当把缓冲帧放入缓冲队列:
VIDIOC_QBUF// 把帧放入队列
VIDIOC_DQBUF// 从队列中取出帧
int ioctl(int fd, int request, struct v4l2_buffer *argp);
例:把四个缓冲帧放入队列,并启动数据流
unsigned int i;
enum v4l2_buf_type type;
for (i = 0; i < 4; ++i) // 将缓冲帧放入队列
{
struct v4l2_buffer buf;
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = i;
ioctl (fd, VIDIOC_QBUF, &buf);
}
type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ioctl (fd, VIDIOC_STREAMON, &type);
// 这有个问题,这些buf 看起来和前面申请的buf 没什么关系,为什么呢?
例:获取一帧并处理
struct v4l2_buffer buf; CLEAR (buf); buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; buf.memory = V4L2_MEMORY_MMAP; ioctl (fd, VIDIOC_DQBUF, &buf); // 从缓冲区取出一个缓冲帧 process_image (buffers[buf.index.]start); // ioctl (fdVIDIOC_QBUF&buf); //
Linux之V4L2基础编程【转】的更多相关文章
- Linux之V4L2基础编程
Linux之V4L2基础编程 本文内容来源于网络,本博客进行整理. 1. 定义 V4L2(Video For Linux Two) 是内核提供给应用程序访问音.视频驱动的统一接口. 2. 工作流程: ...
- 【Linux教程】Linux系统零基础编程入门,想当大神?这些你都要学
✍ 文件和文件系统 文件是Linux系统中最重要的抽象,大多数情况下你可以把linux系统中的任何东西都理解为文件,很多的交互操作其实都是通过文件的读写来实现的. 文件描述符 在Linux内核中,文件 ...
- LINUX 内核调试基础+编程基础
http://blog.chinaunix.net/uid-20564848-id-73208.html 内核文档:[root@localhost Documentation]# pwd /usr/s ...
- 9、基于Linux的v4l2视频架构应用编写
Linux系统中,视频设备被当作一个设备文件来看待,设备文件存放在 /dev目录下,完整路径的设备文件名为: /dev/video0 . 视频采集基本步骤流程如下: 打开视频设备,设置视频设备属性及采 ...
- Linux基础与Linux下C语言编程基础
Linux基础 1 Linux命令 如果使用GUI,Linux和Windows没有什么区别.Linux学习应用的一个特点是通过命令行进行使用. 登录Linux后,我们就可以在#或$符后面去输入命令,有 ...
- LINUX下C语言编程基础
实验二 Linux下C语言编程基础 一.实验目的 1. 熟悉Linux系统下的开发环境 2. 熟悉vi的基本操作 3. 熟悉gcc编译器的基本原理 4. 熟练使用gcc编译器的常用选项 5 .熟练使用 ...
- linux基础编程:IO模型:阻塞/非阻塞/IO复用 同步/异步 Select/Epoll/AIO(转载)
IO概念 Linux的内核将所有外部设备都可以看做一个文件来操作.那么我们对与外部设备的操作都可以看做对文件进行操作.我们对一个文件的读写,都通过调用内核提供的系统调用:内核给我们返回一个file ...
- 【转】Linux基础与Linux下C语言编程基础
原文:https://www.cnblogs.com/huyufeng/p/4841232.html ------------------------------------------------- ...
- Linux应用程序设计之网络基础编程
1.TCP/IP协议概述 1.1.OSI参考模型及TCP/IP参考模型 OSI协议参考模型是基于国际标准化组织(ISO)的建议发展起来的,从上到下工分为7层:应用层,表示层,会话层,传输层,网络层,数 ...
随机推荐
- CSS选择器,选择器的优先级
CSS选择器 CSS基本语法 选择器 + 声明块 选择器 - 通过CSS选择器选中页面中的指定元素,下面会重点写. 声明块 - 选择器后面跟着的是声明块,使用{}括起来,由一个个声明组成,声明由名值对 ...
- [hgoi#2019/2/16t2]friend
题目描述 在一个遥远的国度里有n个人,每个人手上写着4个互不相同的数. 这个国度比较奇怪,如果两个人至少有一个数字相同,则他们是一对朋友. 现在这n个人按序号从左到右排成了一排,每个人都想知道在他左边 ...
- bzoj1345 序列问题
题意: 给你一个序列,长度为n.你需要进行n - 1次操作,每次合并两个相邻的数,代价是max,合并后成为max,求最小代价. n <= 1e6 解: 有个显然的做法是nlogn的,显然不行.. ...
- Spring的FactoryBean使用
Spring中有两种类型的Bean,一种是普通Bean,另一种是工厂Bean,即FactoryBean.工厂Bean跟普通Bean不同,其返回的对象不是指定类的一个实例,其返回的是该工厂Bean的g ...
- (二维数组 亿进制 或 滚动数组) Hat's Fibonacci hdu1250
Hat's Fibonacci Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 65536/32768 K (Java/Others) ...
- 20145215《网络对抗》Exp7 网络欺诈技术防范
20145215<网络对抗>Exp7 网络欺诈技术防范 基础问题回答 通常在什么场景下容易受到DNS spoof攻击? 在同一局域网下比较容易受到DNS spoof攻击,攻击者可以冒充域名 ...
- jsp中的request.getContextPath()
jsp中的request.getContextPath() <%=request.getContextPath()%>是为了解决相对路径的问题,可返回站点的根路径. 但不用也可以吧,比 ...
- python3 获取Linux系统信息
系统信息 import platform platform.uname() platform.architecture() CPU信息 /proc/cpuinfo文件包含了系统处理器单元的信息. #! ...
- js对象克隆
大家都知道,js的对象是引用类型,如果直接var obj2 = obj,obj2和obj是共享同一个对象实体的,这往往不是我们想要的结果. 官方并没有给出通用的对象克隆方法: 我们给出以下几种写法: ...
- python---ORM之SQLAlchemy(5)联合唯一的使用
# coding:utf8 # __author: Administrator # date: // # /usr/bin/env python import sqlalchemy from sqla ...