Ubuntu 20.04下源码编译安装ROS 2 Foxy Fitzroy
1. 系统要求
在官方给出的Foxy目标系统中,Ubuntu Linux - Focal Fossa (20.04) 64位是首选,本文也选择Ubuntu 20.04 64位,其他还包括Debian Linux - Buster (10)、Fedora 32、Arch Linux、OpenEmbedded / webOS OSE,但Foxy还没有充分测试,不推荐使用。
2. 系统设置
(1) 设置locale
(2) 添加ROS 2 apt仓库
问题1:ERROR: unable to process source https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc 之类的错误,可能是因为raw.githubusercontent.com网站被墙了。解决方法:修改hosts文件,添加这个网站的ip地址[2]。#打开hosts文件sudo gedit /etc/hosts#在文件末尾添加151.101.84.133 raw.githubusercontent.com
(3) 安装开发工具和ROS工具
sudo apt update && sudo apt install -y \
build-essential \
cmake \
git \
libbullet-dev \
python3-colcon-common-extensions \
python3-flake8 \
python3-pip \
python3-pytest-cov \
python3-rosdep \
python3-setuptools \
python3-vcstool \
wget
# install some pip packages needed for testing
python3 -m pip install -U \
argcomplete \
flake8-blind-except \
flake8-builtins \
flake8-class-newline \
flake8-comprehensions \
flake8-deprecated \
flake8-docstrings \
flake8-import-order \
flake8-quotes \
pytest-repeat \
pytest-rerunfailures \
pytest
# install Fast-RTPS dependencies
sudo apt install --no-install-recommends -y \
libasio-dev \
libtinyxml2-dev
# install Cyclone DDS dependencies
sudo apt install --no-install-recommends -y \
libcunit1-dev
3. 获取ROS 2代码
mkdir -p ~/ros2_foxy/src
cd ~/ros2_foxy
wget https://raw.githubusercontent.com/ros2/ros2/foxy/ros2.repos
vcs import src < ros2.repos
如果Fast-DDS无法正常下载,自行下载解压到~/ros2_foxy/src/eProsima/Fast-DDS。
4. 使用rosdep安装依赖
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro foxy -y --skip-keys "console_bridge fastcdr fastrtps rti-connext-dds-5.3.1 urdfdom_headers"
5. 编译ROS 2
cd ~/ros2_foxy/
colcon build --symlink-install
问题2: ImportError: "from catkin_pkg.package import parse_package" failed: No module named catkin_pkg.package解决方法[3]:pip install catkin_pkg
问题3: importError: No module named em解决方法[4]:python -m pip install empy
问题4: importError: No module named lark解决方法[5]:python -m pip install lark-parser
问题5: can not locate Clang's built-in include directory解决方法[6]:重装shiboken2 sudo apt remove shiboken2 libshiboken2-dev libshiboken2-py3-5.14 pip3 install --user shiboken2
问题6: 几处因为ExternalProject_Add下载卡住的地方,修改对应的CMakeLists.txt。解决方法: (1) ~/ros2_foxy/src/ros2/rosbag2/shared_queues_vendor/CMakeLists.txt, 8-33行
ExternalProject_Add(ext-singleproducerconsumer
PREFIX singleproducerconsumer
#DOWNLOAD_DIR ${CMAKE_CURRENT_BINARY_DIR}/download
#URL https://github.com/cameron314/readerwriterqueue/archive/ef7dfbf553288064347d51b8ac335f1ca489032a.zip
#自行修改 `path-to-file', zip文件见附件readerwriterqueue-ef7dfbf553288064347d51b8ac335f1ca489032a.zip
URL /path-to-file/readerwriterqueue-ef7dfbf553288064347d51b8ac335f1ca489032a.zip
URL_MD5 64c673dd381b8fae9254053ad7b2be4d
#TIMEOUT
INSTALL_DIR ${CMAKE_CURRENT_BINARY_DIR}
CONFIGURE_COMMAND ""
BUILD_COMMAND ""
INSTALL_COMMAND ""
) # Concurrent and blocking concurrent queue by moodycamel - header only, don't build, install
ExternalProject_Add(ext-concurrentqueue
PREFIX concurrentqueue
#DOWNLOAD_DIR ${CMAKE_CURRENT_BINARY_DIR}/download
#URL https://github.com/cameron314/concurrentqueue/archive/8f65a8734d77c3cc00d74c0532efca872931d3ce.zip
# 自行修改 `path-to-file', zip文件见附件concurrentqueue-8f65a8734d77c3cc00d74c0532efca872931d3ce.zip
URL /path-to-file/concurrentqueue-8f65a8734d77c3cc00d74c0532efca872931d3ce.zip
URL_MD5 71a0d932cc89150c2ade85f0d9cac9dc
#TIMEOUT
INSTALL_DIR ${CMAKE_CURRENT_BINARY_DIR}
CONFIGURE_COMMAND ""
BUILD_COMMAND ""
INSTALL_COMMAND ""
)
(2) ~/ros2_foxy/src/ros2/rviz/rviz_ogre_vendor/CMakeLists.txt 83-94行
ExternalProject_Add(zlib-1.2.
#URL https://www.zlib.net/fossils/zlib-1.2.11.tar.gz
#自行修改 `path-to-file', zip文件见附件zlib-1.2.11.tar.gz
URL /path-to-file/zlib-1.2..tar.gz
URL_MD5 1c9f62f0778697a09d36121ead88e08e
#TIMEOUT
LOG_CONFIGURE ${should_log}
LOG_BUILD ${should_log}
CMAKE_ARGS
-DCMAKE_INSTALL_PREFIX=${CMAKE_CURRENT_BINARY_DIR}/zlib-install
${extra_cmake_args}
-Wno-dev
)
156-186行
ExternalProject_Add(ogre-v1.12.1
# URL https://github.com/OGRECave/ogre/archive/v1.12.1.zip
#自行修改 `path-to-file', zip文件见附件external_projects/ogre-1.12.1.zip
URL /path-to-file/ogre-1.12..zip
URL_MD5 cdbea4006d223c173e0a93864111b936
# TIMEOUT
LOG_CONFIGURE ${should_log}
LOG_BUILD ${should_log}
CMAKE_ARGS
-DOGRE_STATIC:BOOL=OFF
-DOGRE_DEPENDENCIES_DIR=${CMAKE_CURRENT_BINARY_DIR}/ogredeps
-DOGRE_INSTALL_PDB:BOOL=OFF
-DOGRE_BUILD_DEPENDENCIES:BOOL=OFF
-DOGRE_BUILD_TESTS:BOOL=OFF
-DOGRE_BUILD_SAMPLES:BOOL=FALSE
-DOGRE_INSTALL_SAMPLES:BOOL=FALSE
-DOGRE_INSTALL_SAMPLES_SOURCE:BOOL=FALSE
-DOGRE_CONFIG_THREADS:STRING=
-DOGRE_RESOURCEMANAGER_STRICT:STRING=
-DCMAKE_INSTALL_PREFIX=${CMAKE_CURRENT_BINARY_DIR}/ogre_install
-DOGRE_BUILD_LIBS_AS_FRAMEWORKS:BOOL=OFF
-DOGRE_BUILD_COMPONENT_PYTHON:BOOL=FALSE
-DOGRE_BUILD_COMPONENT_JAVA:BOOL=FALSE
-DOGRE_BUILD_COMPONENT_CSHARP:BOOL=FALSE
-DOGRE_BUILD_COMPONENT_BITES:BOOL=FALSE
${extra_cmake_args}
-Wno-dev
PATCH_COMMAND
${Patch_EXECUTABLE} -p1 -N < ${CMAKE_CURRENT_SOURCE_DIR}/pragma-patch.diff
COMMAND
${CMAKE_COMMAND} -E copy ${CMAKE_CURRENT_SOURCE_DIR}/FindFreetype.cmake ${CMAKE_CURRENT_BINARY_DIR}/ogre-v1.12.1-prefix/src/ogre-v1.12.1/CMake/Packages/FindFreetype.cmake
)
(3) ~/ros2_foxy/src/eProsima/foonathan_memory_vendor/CMakeLists.txt,57-73行
externalproject_add(foo_mem-ext
#GIT_REPOSITORY foonathan/memory
#GIT_TAG c619113
#TIMEOUT
#自行修改 `path-to-file', zip文件见附件memory-master.zip
URL /path-to-file/memory-master.zip
URL_MD5 9fcf2cf8c63d9c74bf3d0c58ca98bf71
# Avoid the update (git pull) and so the recompilation of foonathan_memory library each time.
UPDATE_COMMAND ""
CMAKE_ARGS
-DFOONATHAN_MEMORY_BUILD_EXAMPLES=OFF
-DFOONATHAN_MEMORY_BUILD_TESTS=OFF
-DFOONATHAN_MEMORY_BUILD_TOOLS=ON
-DCMAKE_INSTALL_PREFIX=${CMAKE_CURRENT_BINARY_DIR}/foo_mem_ext_prj_install
${extra_cmake_args}
-Wno-dev
${PATCH_COMMAND_STR}
)
(4) ~/ros2_foxy/src/ros2/rosbag2/zstd_vendor/CMakeLists.txt,32-43行
ExternalProject_Add(zstd-1.4.
#URL https://github.com/facebook/zstd/archive/v1.4.4.zip
#自行修改 `path-to-file', zip文件见附件zstd-1.4.4.zip
URL /path-to-file/zstd-1.4..zip
URL_MD5 3a5c3a535280b7f4dfdbd739fcc7173f
#TIMEOUT
SOURCE_SUBDIR build/cmake
CMAKE_ARGS
-DCMAKE_INSTALL_PREFIX=${CMAKE_CURRENT_BINARY_DIR}/${PROJECT_NAME}_install
-DZSTD_BUILD_STATIC=OFF
-DZSTD_BUILD_SHARED=ON
-DZSTD_BUILD_PROGRAMS=OFF
${extra_cmake_args})
6. 环境设置
source ~/ros2_foxy/install/setup.bash
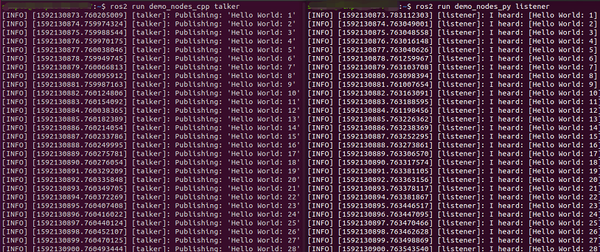
7. 测试
ros2 run demo_nodes_cpp talker
打开另外一个终端,运行Python编写的listener:
ros2 run demo_nodes_py listener
运行结果:
8. 附件
参考
[1] Building ROS 2 on Linux, https://index.ros.org/doc/ros2/Installation/Foxy/Linux-Development-Setup/
[2] rosdep init 或者rosdep update 连接错误的解决办法, https://community.bwbot.org/topic/811/rosdep-init-%E6%88%96%E8%80%85rosdep-update-%E8%BF%9E%E6%8E%A5%E9%94%99%E8%AF%AF%E7%9A%84%E8%A7%A3%E5%86%B3%E5%8A%9E%E6%B3%95
[3] No module named catkin_pkg.package, https://www.jianshu.com/p/e964928d6c62
[4] ros自定义消息的时候报错ImportError:Nomodulenamedem_wawayu_0的专栏-CSDN博客, https://blog.csdn.net/wawayu_0/article/details/79460043
[5] Name conflict in load grammar · Issue #361 · lark-parser/lark, https://github.com/lark-parser/lark/issues/361
[6] rosbag2 build getting fail · Issue #604 · ros2/ros2, https://github.com/ros2/ros2/issues/604
Ubuntu 20.04下源码编译安装ROS 2 Foxy Fitzroy的更多相关文章
- ubuntu 14.04上源码编译安装php7
wget https://downloads.php.net/~ab/php-7.0.0alpha2.tar.bz2 //用winscp把下载好的文件上传到网站中 tar jxf php-7.0.0a ...
- CentOS 6.6 下源码编译安装MySQL 5.7.5
版权声明:转自:http://www.linuxidc.com/Linux/2015-08/121667.htm 说明:CentOS 6.6 下源码编译安装MySQL 5.7.5 1. 安装相关工具# ...
- Linux 下源码编译安装 vim 8.1
前言 目前 linux 的各个发行版基本上都是带了一个 vi 编辑器的,而本文要说的 vim 编辑器对 vi 做了一些优化升级,更好用.当我们需要远程操作一台 linux 服务器的时候,只能使用命令行 ...
- Linux下源码编译安装rpy2
R(又称R语言)是一款开源的跨平台的数值统计和数值图形化展现工具.rpy2是Python直接调用R的第三方库,它可以实现使用python读取R的对象.调用R的方法以及Python与R数据结构转换等.这 ...
- 在Linux下源码编译安装GreatSQL/MySQL
欢迎来到 GreatSQL社区分享的MySQL技术文章,如有疑问或想学习的内容,可以在下方评论区留言,看到后会进行解答 GreatSQL社区原创内容未经授权不得随意使用,转载请联系小编并注明来源. 本 ...
- ubuntu 16.04下源码安装opencv3.4
源码安装opencv,遇到了一些小波折,这里做个备忘吧. 首先要下载源码,路径: https://github.com/opencv/opencv 下载成功后,在opencv的根目录下执行下面操作: ...
- Ubuntu 16.04上源码编译和安装pytorch教程,并编写C++ Demo CMakeLists.txt | tutorial to compile and use pytorch on ubuntu 16.04
本文首发于个人博客https://kezunlin.me/post/54e7a3d8/,欢迎阅读最新内容! tutorial to compile and use pytorch on ubuntu ...
- ubuntu 16.04上源码编译和安装cgal并编写CMakeLists.txt | compile and install cgal on ubuntu 16.04
本文首发于个人博客https://kezunlin.me/post/39ab7ed9/,欢迎阅读最新内容! compile and install cgal on ubuntu 16.04 Guide ...
- CentOS 7.4下源码编译安装配置LAMP环境详解
CentOS 7.4搭建LAMP,LAMP:Linux.Apache.MySQL.PHP. 目录:第一部分 准备工作第二部分 安装Apache服务第三部分 安装MySQL服务第四部分 搭建PHP运行环 ...
随机推荐
- hdu4757 可持续字典树
Tree Time Limit: 10000/5000 MS (Java/Others) Memory Limit: 102400/102400 K (Java/Others)Total Sub ...
- poj3764字典树路径最大异或和
The xor-longest Path Time Limit: 2000MS Memory Limit: 65536K Total Submissions: 6853 Accepted: 1 ...
- 【python 爬虫】fake-useragent Maximum amount of retries reached解决方案
前言 在用fake-useragent的时候发生报错,fake_useragent.errors.FakeUserAgentError: Maximum amount of retries reach ...
- 【解决办法】IIS环境中,打开网站后就直接列出了所有文件
有时候访问一个不应当被访问的网站目录时网站会列出该目录下的所有文件,这很不安全,尤其是我们希望我们自己的网站不出现这种情况,如下图所示. 解决办法,在网站根目录新建web.config文件,内容如下: ...
- channelartlist标签的使用
用来获取当前频道的下级栏目的内容列表标签 . type=“top”表示顶级栏目 ,typeid='top' 限制上级栏目ID:如果只要调用其中几个频道的内容可以用{dede:channelartlis ...
- JavaScript之倔强的字符串
关于倔强的JavaScript字符串:不可以被修改 我们是字符串 我们的口号是:你可以消灭我,但是你不能改变我 JavaScript字符串是不可改变的,当真是这样的吗? 让我们来试验一下. var n ...
- Python 每日一练(4)
引言 今天继续是python每日一练的几个专题,主要涵盖简单的敏感词识别以及图片爬虫 敏感词识别 这个敏感词的识别写的感觉比较简单,总的概括之后感觉功能可以简略成if filter_words in ...
- BUUCTF WEB
BUUCTF 几道WEB题WP 今天做了几道Web题,记录一下,Web萌新写的不好,望大佬们见谅○| ̄|_ [RoarCTF 2019]Easy Calc 知识点:PHP的字符串解析特性 参考了一下网 ...
- windows下nodejs的安装
1.下载 从nodejs官网下载地址:http://www.nodejs.org 2.安装 双击node-v4.4.0-x64.msi或者其他版本 3.环境搭建 进入cmd命令窗口 进入到nodejs ...
- ASP.NET Core Blazor Webassembly 之 数据绑定
上一次我们学习了Blazor组件相关的知识(Asp.net Core Blazor Webassembly - 组件).这次继续学习Blazor的数据绑定相关的知识.当代前端框架都离不开数据绑定技术. ...