opencv python 图像二值化/简单阈值化/大津阈值法
pip install matplotlib
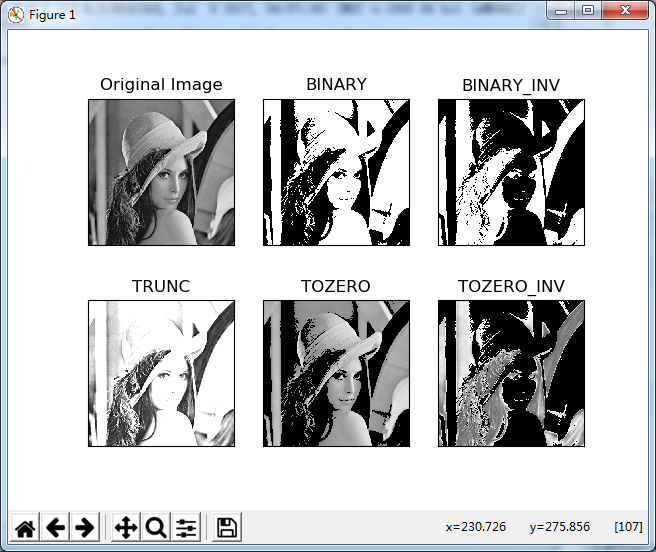
1简单的阈值化
cv2.threshold第一个参数是源图像,它应该是灰度图像. 第二个参数是用于对像素值进行分类的阈值, 第三个参数是maxVal,它表示如果像素值大于(有时小于)阈值则要给出的值. OpenCV提供不同类型的阈值,它由函数的第四个参数决定. 不同的类型是:
| cv2.THRESH_BINARY | 如果 src(x,y)>threshold ,dst(x,y) = max_value; 否则,dst(x,y)=0 |
| cv.THRESH_BINARY_INV | 如果 src(x,y)>threshold,dst(x,y) = 0; 否则,dst(x,y) = max_value |
| cv.THRESH_TRUNC | 如果 src(x,y)>threshold,dst(x,y) = max_value; 否则dst(x,y) = src(x,y) |
| cv.THRESH_TOZERO | 如果src(x,y)>threshold,dst(x,y) = src(x,y) ; 否则 dst(x,y) = 0 |
| cv.THRESH_TOZERO_INV | 如果 src(x,y)>threshold,dst(x,y) = 0 ; 否则dst(x,y) = src(x,y) |
代码
import cv2
import numpy as np
import matplotlib.pylab as plt img = cv2.imread('lena.jpg',0)
ret,thresh1 = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
ret,thresh2 = cv2.threshold(img,127,255,cv2.THRESH_BINARY_INV)
ret,thresh3 = cv2.threshold(img,127,255,cv2.THRESH_TRUNC)
ret,thresh4 = cv2.threshold(img,127,255,cv2.THRESH_TOZERO)
ret,thresh5 = cv2.threshold(img,127,255,cv2.THRESH_TOZERO_INV) titles = ['Original Image','BINARY','BINARY_INV','TRUNC','TOZERO','TOZERO_INV']
images = [img, thresh1, thresh2, thresh3, thresh4, thresh5] for i in range(6):
plt.subplot(2,3,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([]) plt.show()
测试效果
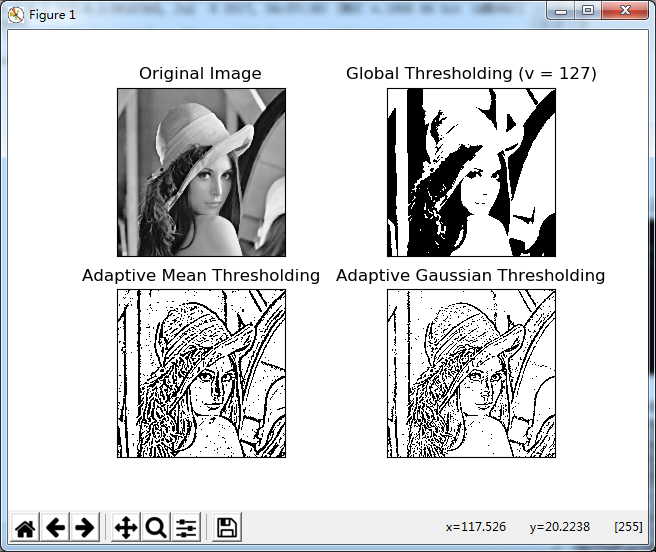
2自适应阈值化
图像在不同区域具有不同照明条件时,应进行自适应阈值处理.因此,我们为同一图像的不同区域获得不同的阈值,并且它为具有不同照明的图像提供了更好的结果.cv2.adaptiveThreshold(src, maxValue, adaptiveMethod, thresholdType, blockSize, C[, dst])
adaptiveMethod:决定如何计算阈值
- cv2.ADAPTIVE_THRESH_MEAN_C:阈值是邻域的平均值
- cv2.ADAPTIVE_THRESH_GAUSSIAN_C:阈值是邻域值的加权和,其中权重是高斯窗口
blockSize:决定了邻域的大小
C:从计算的平均值或加权平均值中减去的常数
import cv2
import numpy as np
import matplotlib.pylab as plt img = cv2.imread('lena.jpg',0)
img = cv2.medianBlur(img,5) ret,th1 = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
th2 = cv2.adaptiveThreshold(img,255,cv2.ADAPTIVE_THRESH_MEAN_C,\
cv2.THRESH_BINARY,11,2)
th3 = cv2.adaptiveThreshold(img,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,\
cv2.THRESH_BINARY,11,2) titles = ['Original Image', 'Global Thresholding (v = 127)',
'Adaptive Mean Thresholding', 'Adaptive Gaussian Thresholding']
images = [img, th1, th2, th3] for i in range(4):
plt.subplot(2,2,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
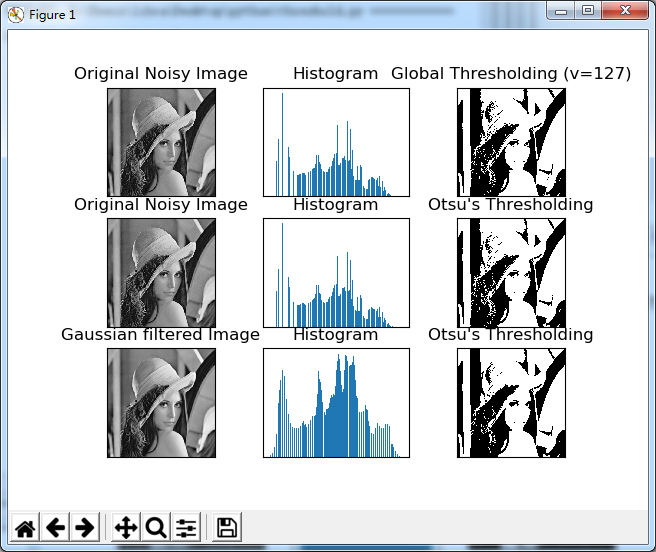
3 大津阈值法
根据双峰图像的图像直方图自动计算阈值。 (对于非双峰图像,二值化不准确。)
使用cv.threshold()但是传递了一个额外的标志v.THRESH_OTSU.对于阈值,只需传递零.然后算法找到最佳阈值并返回为第二个输出retVal。如果未使用Otsu阈值法,则retVal与之前使用的阈值相同.
在第一种情况下,将全局阈值应用为值127.在第二种情况下,直接应用了Otsu的阈值.在第三种情况下,使用5x5高斯内核过滤图像以消除噪声,然后应用Otsu阈值处理.
代码:
import cv2
import numpy as np
import matplotlib.pylab as plt img = cv2.imread('lena.jpg',0)
# global thresholding
ret1,th1 = cv2.threshold(img,127,255,cv2.THRESH_BINARY) # Otsu's thresholding
ret2,th2 = cv2.threshold(img,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU) # Otsu's thresholding after Gaussian filtering
blur = cv2.GaussianBlur(img,(5,5),0)
ret3,th3 = cv2.threshold(blur,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU) # plot all the images and their histograms
images = [img, 0, th1,
img, 0, th2,
blur, 0, th3]
titles = ['Original Noisy Image','Histogram','Global Thresholding (v=127)',
'Original Noisy Image','Histogram',"Otsu's Thresholding",
'Gaussian filtered Image','Histogram',"Otsu's Thresholding"] for i in range(3):
plt.subplot(3,3,i*3+1),plt.imshow(images[i*3],'gray')
plt.title(titles[i*3]), plt.xticks([]), plt.yticks([])
plt.subplot(3,3,i*3+2),plt.hist(images[i*3].ravel(),256)
plt.title(titles[i*3+1]), plt.xticks([]), plt.yticks([])
plt.subplot(3,3,i*3+3),plt.imshow(images[i*3+2],'gray')
plt.title(titles[i*3+2]), plt.xticks([]), plt.yticks([]) plt.show()
opencv python 图像二值化/简单阈值化/大津阈值法的更多相关文章
- 10、OpenCV Python 图像二值化
__author__ = "WSX" import cv2 as cv import numpy as np #-----------二值化(黑0和白 255)---------- ...
- [python-opencv]图像二值化【图像阈值】
图像二值化[图像阈值]简介: 如果灰度图像的像素值大于阈值,则为其分配一个值(可以是白色255),否则为其分配另一个值(可以是黑色0) 图像二值化就是将灰度图像上的像素值设置为0或255,也就是将整个 ...
- Python+OpenCV图像处理(十)—— 图像二值化
简介:图像二值化就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的黑白效果的过程. 一.普通图像二值化 代码如下: import cv2 as cv import numpy ...
- OpenCV_基于局部自适应阈值的图像二值化
在图像处理应用中二值化操作是一个很常用的处理方式,例如零器件图片的处理.文本图片和验证码图片中字符的提取.车牌识别中的字符分割,以及视频图像中的运动目标检测中的前景分割,等等. 较为常用的图像二值化方 ...
- Win8 Metro(C#)数字图像处理--2.56简单统计法图像二值化
原文:Win8 Metro(C#)数字图像处理--2.56简单统计法图像二值化 [函数名称] 简单统计法图像二值化 WriteableBitmap StatisticalThSegment(Wr ...
- python实现图像二值化
1.什么是图像二值化 彩色图像: 有blue,green,red三个通道,取值范围均为0-255 灰度图:只有一个通道0-255,所以一共有256种颜色 二值图像:只有两种颜色,黑色和白色,二值化就是 ...
- openCV_java 图像二值化
较为常用的图像二值化方法有:1)全局固定阈值:2)局部自适应阈值:3)OTSU等. 局部自适应阈值则是根据像素的邻域块的像素值分布来确定该像素位置上的二值化阈值.这样做的好处在于每个像素位置处的二值化 ...
- Win8 Metro(C#)数字图像处理--2.59 P分位法图像二值化
原文:Win8 Metro(C#)数字图像处理--2.59 P分位法图像二值化 [函数名称] P分位法图像二值化 [算法说明] 所谓P分位法图像分割,就是在知道图像中目标所占的比率Rat ...
- Win8 Metro(C#)数字图像处理--2.55OSTU法图像二值化
原文:Win8 Metro(C#)数字图像处理--2.55OSTU法图像二值化 [函数名称] Ostu法图像二值化 WriteableBitmap OstuThSegment(Writ ...
随机推荐
- 探究重构代码(Code refactoring)
Code refactoring 是什么 在不改变软件的外部行为的条件下,通过修改代码改变软件内部结构,将效率低下和过于复杂的代码转换为更高效.更简单和更简单的代码. 怎样执行Code refacto ...
- 错误 NETSDK1007 找不到“E:\Project\MyProject\MyProject.Common\MyProject.Utility.csproj”的项目信息。这可以指示缺少一个项目引用。 MyProject.Data C:\Program Files\dotnet\sdk\2.2.107\Sdks\Microsoft.NET.Sdk\targets\Microsof
因为对MyProject.Data引用的项目MyProject.Common进行了重命名为MyProject.Utility,导致这个错误 解决办法: 1.找到MyProject.Data中的E:\P ...
- React Router学习笔记(转自阮一峰老师博客)
React Router是一个路由库,通过管理URL来实现组件切换和状态转变. 1.安装和使用 $ npm install -S react-router 在使用时,作为React组件导入 impor ...
- Spring MVC静态资源处理——<mvc:resources /> ||<mvc:default-servlet-handler />
优雅REST风格的资源URL不希望带 .html 或 .do 等后缀.由于早期的Spring MVC不能很好地处理静态资源,所以在web.xml中配置DispatcherServlet的请求映射,往往 ...
- set_option()函数
这个函数用于设置dataframe的输出显示, import pandas as ps pd.set_option('expand_frame_repr', True) # True就是可以换行显示. ...
- list,string,tuple,dictionary之间的转换
list,string,tuple,dictionary之间的转换 类型 String List tuple dictionary String - list(str), str.split() tu ...
- VS Code 使用Git进行版本控制
在Windows上安装Git:msysgit是Windows版的Git,从https://git-for-windows.github.io下载 Git安装到环境变量里,确保任意路径可以访问:将git ...
- Centos快速安装 Memcached
rpm qa|grep memcached //首先检查memcache是否已经安装完成 yum install memcached //(提示你是否确认安装输入y)检查完成后执行安装命令 yum i ...
- switch条件变量的取值类型
switch条件变量的取值类型主要有以下六种: 1)JDK1.5(不含JDK1.5)之前只能是byte.short.int.char类型,不能是float.double.long.boolean类型. ...
- 使用certbot 为nginx或openresty启用https
certbot 使用letsencrypt 生成免费https证书 以下内容网上整理,原文地址 https://segmentfault.com/a/1190000005797776 -------- ...