unity, 相机空间 与 相机gameObject的局部空间
在unity里 相机空间 与 相机gameObject的局部空间 不重合。
Camera.worldToCameraMatrix的文档中有这样一句话:
Note that camera space matches OpenGL convention: camera's forward is the negative Z axis. This is different from Unity's convention, where forward is the positive Z axis.
意思是说unity中相机gameObject的蓝轴是相机空间的-Z。
为了确认,做了如下实验:
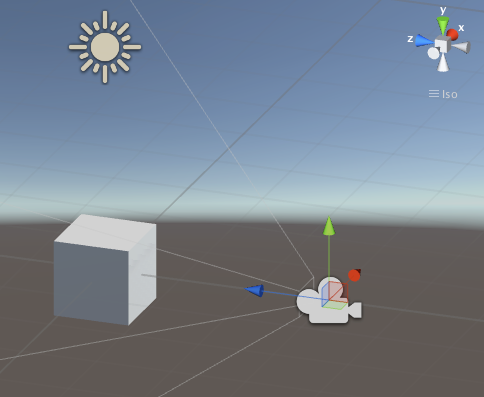
如图,立方体的坐标是(0,0,0),相机的坐标是(0,0,-3),我们要计算并输出立方体在相机空间的坐标。
做法是为立方体添加如下脚本:
using UnityEngine;
using System.Collections;
public class printPosInCameraSpace : MonoBehaviour {
public GameObject m_cameraRef;
// Use this for initialization
void Start () {
Matrix4x4 worldToCameraMat = m_cameraRef.GetComponent<Camera>().worldToCameraMatrix;
Vector3 thisPosInWorld = transform.position;
Vector3 thisPosInCamera = worldToCameraMat.MultiplyPoint (thisPosInWorld);
Debug.Log (thisPosInCamera);
}
}
并在编辑器中将camera赋给m_cameraRef.
然后运行脚本,得到输出结果为:(0,0,-3)。
这说明相机gameObject的蓝轴确实是相机空间-Z轴。
进一步实验:
将脚本改为:
using UnityEngine;
using System.Collections;
public class printPosInCameraGameObjectLocalSpace : MonoBehaviour {
public GameObject m_cameraRef;
// Use this for initialization
void Start () {
Matrix4x4 worldToCameraMat = m_cameraRef.transform.worldToLocalMatrix;
Vector3 thisPosInWorld = transform.position;
Vector3 thisPosInCamera = worldToCameraMat.MultiplyPoint (thisPosInWorld);
Debug.Log (thisPosInCamera);
}
}
输出结果为:(0,0,3)。
--结论:
相机空间 和 相机gameObject的局部空间 是不重合的。 图中这三个坐标轴表示的是 相机gameObject的局部空间。 而 相机空间 则Z轴方向与之相反。
图中这三个坐标轴表示的是 相机gameObject的局部空间。 而 相机空间 则Z轴方向与之相反。
Camera.worldToCameraMatrix是 世界空间to相机空间 矩阵。Camera.transform.worldToLocalMatrix是 世界空间to相机gameObject的局部空间 矩阵,两个矩阵是不一样的。
unity, 相机空间 与 相机gameObject的局部空间的更多相关文章
- 【Unity】2.8 相机(Camera)
分类:Unity.C#.VS2015 创建日期:2016-03-31 一.简介 Unity的相机用来向玩家呈现游戏世界.你在场景中始终至少有一个相机,但也可以有多个.多个相机可以带给您双人分屏效果或创 ...
- Android调用系统相机、自定义相机、处理大图片
Android调用系统相机和自定义相机实例 本博文主要是介绍了android上使用相机进行拍照并显示的两种方式,并且由于涉及到要把拍到的照片显示出来,该例子也会涉及到Android加载大图片时候的处理 ...
- 有关默认相机转VR相机
呃...15年开篇~ 去年想写一个有关默认相机转VR相机的脚本,当时没写完,今天不小心翻到并写完了,而且思路也和原来完全不一样了,增加了是否删除原相机与是否转换所选相机的选项. 由于国内VR版本比较混 ...
- 干货 | LIDAR、ToF相机、双目相机如何科学选择?
点击"计算机视觉life"关注,置顶更快接收消息! 本文阅读时间约5分钟 本文翻译自卡内基梅隆大学 Chris asteroid 三维视觉技术的选择 传感器参数及定义 LIDAR ...
- 3dmax 物体的真正局部空间原点
假设在3dmax中创建一个 长x宽x高=1cm x 1cm x 1cm 的单位立方体,则默认局部坐标系原点在底面中心,进入 “层次”面板->轴->调整轴,按下“仅影响轴”,再点“居中到对象 ...
- cocos2dx 3.3将坐标由父空间转化到局部空间
设在node的父空间内有一点p,要求其转化到node局部空间后的坐标p_local,代码如下: node->getNodeToParentTransform();//in order node- ...
- OpenGL 的空间变换(下):空间变换
通过本文的上篇 OpenGL 的空间变换(上):矩阵在空间几何中的应用 ,我们了解到矩阵的基础概念.并且掌握了矩阵在空间几何中的应用.接下来,我们将结合矩阵来了解 OpenGL 的空间变换. 在使用 ...
- 有一台机器,上面有m个储存空间。然后有n个请求,第i个请求计算时需要占 R[i]个空间,储存计算结果则需要占据O[i]个空间(据O[i]个空间(其中O[i]<R[i])。问怎么安排这n个请求的顺序,使
有一台机器,上面有m个储存空间.然后有n个请求,第i个请求计算时需要占 R[i]个空间,储存计算结果则需要占据O[i]个空间(据O[i]个空间(其中O[i]<R[i]).问怎么安排这n个请求的顺 ...
- [原][数学][C++][osg]空间向量OA到转到空间向量OB、以及四元素Q1转到Q2的函数
注意:Oa其实在OK的延长线上,上图只是为了好看才把Oa和OK分开了 算法需求如图所示: 已知空间向量OA和空间向量OB 我想算出OA向OB按某角度或者某时间移动 变成空间向量Oa的算法 先说废话:我 ...
随机推荐
- linux下批量添加新用户
作为一个系统管理员,可能要经常的为机器添加用户,可能是在一台机器上添加很多用户,也有可能是在很多机器上要添加同一个用户. 基本上,批量添加用户有两种方式,一是用useradd + passwd命令配合 ...
- 支持向量机通俗导论(理解SVM的三层境界) by v_JULY_v
支持向量机通俗导论(理解SVM的三层境界) 前言 动笔写这个支持向量机(support vector machine)是费了不少劲和困难的,原因很简单,一者这个东西本身就并不好懂,要深入学习和研究下去 ...
- jQuery EasyUI 数据网格 - 条件设置行背景颜色
$('#tt').datagrid({ rowStyler:function(index,row){ if (row.listprice>50){ return 'color:blue;font ...
- 探索 Python、机器学习和 NLTK 库 开发一个应用程序,使用 Python、NLTK 和机器学习对 RSS 提要进行分类
挑战:使用机器学习对 RSS 提要进行分类 最近,我接到一项任务,要求为客户创建一个 RSS 提要分类子系统.目标是读取几十个甚至几百个 RSS 提要,将它们的许多文章自动分类到几十个预定义的主题领域 ...
- OpenJudge 8782 乘积最大——S.B.S
8782:乘积最大 总时间限制: 1000ms 内存限制: 65536kB 描述 今年是国际数学联盟确定的“2000——世界数学年”,又恰逢我国著名数学家华罗庚先生诞辰90周年.在华罗庚先生的家乡江 ...
- CSS:CSS+DIV布局网页
现代网页布局:CSS+DIV: 一般的网页都是顺序布局的,很难达到我们需要的网页布局格式,此时使用DIV进行分层布局,类似于盒子,对每一部分内容进行设计.这是现在主流的网页布局方式,使用DIV+CSS ...
- Centos 7 配置 VNCServer 經驗
安裝 Centos 7後, 習慣性的安裝 Xmanager 3或4, 都不能正常工作, 無奈之下開始安裝 VNCServer. (個人習慣使用Xmanager, 因為不需要安裝,只要配置一下就能用, ...
- Gerrit代码审核服务器搭建全过程
Gerrit代码审核服务器搭建全过程 转载请标明出处:http://blog.csdn.net/ganshuyu/article/details/8978614 环境:Ubuntu12.xx 1.建立 ...
- Asp.net 在网页编写C#代码示例-- 一个简单的web MsSql 命令执行环境
在给一个客户做的系统上,因为要对数据库进行查看,但之前都是用TeamView来连接到客户的服务器进行数据库操作的 但最近客户那边的TeamView好像更改过密码导致我无法正常连接,而巧了客户的网官因为 ...
- Vc++内存布局
Vc++内存布局 测试平台 Windows server 2012 R2 and visual studio 2013 professional. 本篇文章意在介绍vc++中类的内存布局方式,只是研究 ...