[双目视差] 单双目MATLAB 相机标定(二)双目摄像机标定
单双目MATLAB 相机标定(二)双目摄像机标定
一、环境准备
MATLAB R2014a+windows7 64位
单目标定的15对左右摄像头获取的图像,还有两个独立标定的结果如Calib_Results_left.mat、Calib_Results_right.mat
二、标定过程
(1)在窗口处输入“stereo_gui",出现如图窗口:
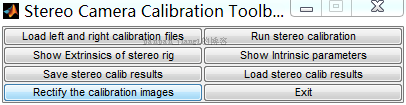
(2)点击第一个按钮 Load left and right calibration files .窗口提示输入左右标定文件名,分别输入对应文件名 Calib_Results_left.mat Calib_Results_right.mat

(3)运行全局双目优化算法通过点击按钮Run stereo calibration 有以下所示结果:

可以发现内外参数都被重新计算,所有未确定的参数也确定保证误差最小的基础上。你会发现不确定的内参数都变小了,这是因为最优化算法的作用。默认情况下,优化算法会重新计算左右相机的内部参数,但是如果你不想让其优化,则在窗口运行recompute_instrinsic_left和或者recompute_instrinsic_right
(4)双目相机的空间位置和标定平面可以可视化,通过点击按键 Show Extrinsics of the rig.

(5)点击 Savestereo calib results ,存储标定数据结果

(6)校正图像 点击 Rectify the calibrationimages ,所有15对图片校正后图像存储在文件下

因为提供了原始的图像,这两个初始的独立的校准可以得到Calib_Results_left.mat和Calib_Results_right.mat。
通过角点提取的过程,需要牢记的是,对于每对图像,必须选择相同的一组左、右图像的点,即相同的网格点和相同的原点(为了保证相同的模式参考系)。因此,确保相同的起源点(第一次点击)一直被选中是至关重要的。一个简单的方法是总选择网格的左上角为原点(这样做是为了生成两个提供的校准文件)。在您自己的立体标定中,可以使用不同的策略,如标志的起源点在网格模式本身。
[双目视差] 单双目MATLAB 相机标定(二)双目摄像机标定的更多相关文章
- 相机标定 matlab opencv ROS三种方法标定步骤(1)
一 . 理解摄像机模型,网上有很多讲解的十分详细,在这里我只是记录我的整合出来的资料和我的部分理解 计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系,实际上就是要用矩阵来表 示各个 ...
- 相机标定简介与MatLab相机标定工具箱的使用(未涉及原理公式推导)
相机标定 一.相机标定的目的 确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,建立摄像机成像的几何模型,这些几何模型参数就是摄像机参数. 二.通用摄像机模型 世界坐标系.摄像机坐标 ...
- 机器视觉学习笔记(5)——基于OpenCV的单目摄像机标定
本文CameraCalibrator类源代码来自于OpenCV2 计算机视觉编程手册(Robert Laganiere 著 张静 译) 强烈建议阅读机器视觉学习笔记(4)--单目摄像机标定参数说明之后 ...
- Matlab 摄像机标定+畸变校正
博客转载自:http://blog.csdn.net/Loser__Wang/article/details/51811347 本文目的在于记录如何使用MATLAB做摄像机标定,并通过opencv进行 ...
- 张正友相机标定Opencv实现以及标定流程&&标定结果评价&&图像矫正流程解析(附标定程序和棋盘图)
使用Opencv实现张正友法相机标定之前,有几个问题事先要确认一下,那就是相机为什么需要标定,标定需要的输入和输出分别是哪些? 相机标定的目的:获取摄像机的内参和外参矩阵(同时也会得到每一幅标定图像的 ...
- SQL基本查询_单表查询(实验二)
SQL基本查询_单表查询(实验二) 查询目标表结构及数据 emp empno ename job hiedate sal comn deptno 1007 马明 内勤 1992-6-12 4000 2 ...
- MySQL之单表查询 一 单表查询的语法 二 关键字的执行优先级(重点) 三 简单查询 四 WHERE约束 五 分组查询:GROUP BY 六 HAVING过滤 七 查询排序:ORDER BY 八 限制查询的记录数:LIMIT 九 使用正则表达式查询
MySQL之单表查询 阅读目录 一 单表查询的语法 二 关键字的执行优先级(重点) 三 简单查询 四 WHERE约束 五 分组查询:GROUP BY 六 HAVING过滤 七 查询排序:ORDER B ...
- 微信小程序——表单验证插件WxValidate的二次封装(二)
在上一篇博客<微信小程序——仿jqueryValidate表单验证插件WxValidate的二次封装>中,我将WxValidate做了再次封装,简化了初始规则数据的构造,但是当有错误时页面 ...
- [zt]摄像机标定(Camera calibration)笔记
http://www.cnblogs.com/mfryf/archive/2012/03/31/2426324.html 一 作用建立3D到2D的映射关系,一旦标定后,对于一个摄像机内部参数K(光心焦 ...
- [OpenCV-Python] OpenCV 中摄像机标定和 3D 重构 部分 VII
部分 VII摄像机标定和 3D 重构 OpenCV-Python 中文教程(搬运)目录 42 摄像机标定 目标 • 学习摄像机畸变以及摄像机的内部参数和外部参数 • 学习找到这些参数,对畸变图像进行修 ...
随机推荐
- liunx 目录详解
/etc/sysconfig/network-scripts/ifcfg-eth0 第一块网卡的配置文件 /etc/sysconfig/network 主机名配置文件 /etc/profile ...
- find . -name "*.php" -execdir grep -nH --color=auto foo {} ';'
find . -name "*.php" -execdir grep -nH --color=auto foo {} ';'
- element中表格中对其解决方法:
element中表格中对其解决方法: 一开始错位的表格的样式: 发现我们设置的align="center"居中没人用 后面是操作列里的按钮影响了它 直接把align里的属性 ...
- nios flash programer固化后不能运行
针对我的这个工程D:\works\FROM_COMP\8050\software\FPGA\MC8050_EP4CE15,出现的问题是nios eds 运行正常,有打印输出,有LED闪烁.但是flas ...
- 笔精墨妙,妙手丹青,微软开源可视化版本的ChatGPT:Visual ChatGPT,人工智能AI聊天发图片,Python3.10实现
说时迟那时快,微软第一时间发布开源库Visual ChatGPT,把 ChatGPT 的人工智能AI能力和Stable Diffusion以及ControlNet进行了整合.常常被互联网人挂在嘴边的& ...
- Android开发环境的搭建(一)
开发环境的搭建 Android 应用程序一般使用 Android 软件开发工具包,采用 Java 语言来开发. Android软件开发需要用到的开发工具,如图所示: JDK:相信大家在学习Java语言 ...
- MVVM模型 && 数据代理
MVVM模型 观察发现 data中所有属性,最后都出现在vm身上 vm身上所有属性及Vue原型身上所有属性,在Vue模板中都可以直接使用 Vue中的数据代理 通过vm对象来代理data对象中属性的操作 ...
- Jan Ozer:高清直播互动场景下的硬编码如何选型?
前言 高清直播逐渐普及,硬编码也成为大势所趋.在 RTE 2022 大会上,来自 NETINT 的 Jan Ozer 通过一系列的对比测试结果,详细分享了如何为高清直播互动场景进行硬编码的技术选型. ...
- Mybatisplus标准数据层CRUD功能
package com.itheima; import com.itheima.dao.UserDao; import com.itheima.domain.User; import org.juni ...
- uniapp踩坑必备笔记
1.[配置]应用版本号名称有一个规则的字符串:1.0.0,规则是:大版本号,中版本号,小版本号. 2.[配置]应用版本号中的小版本号不能超过9,超过9的需要向上一个版本号进一(逢十进一). 3.[配置 ...