【转】AXI_Lite 总线详解








input wire s00_axi_aclk,
input wire s00_axi_aresetn,
input wire [C_S00_AXI_ADDR_WIDTH- : ] s00_axi_awaddr,
input wire [ : ] s00_axi_awprot,
input wire s00_axi_awvalid,
output wire s00_axi_awready,
input wire [C_S00_AXI_DATA_WIDTH- : ] s00_axi_wdata,
input wire [(C_S00_AXI_DATA_WIDTH/)- : ] s00_axi_wstrb,
input wire s00_axi_wvalid,
output wire s00_axi_wready,
output wire [ : ] s00_axi_bresp,
output wire s00_axi_bvalid,
input wire s00_axi_bready,
input wire [C_S00_AXI_ADDR_WIDTH- : ] s00_axi_araddr,
input wire [ : ] s00_axi_arprot,
input wire s00_axi_arvalid,
output wire s00_axi_arready,
output wire [C_S00_AXI_DATA_WIDTH- : ] s00_axi_rdata,
output wire [ : ] s00_axi_rresp,
output wire s00_axi_rvalid,
input wire s00_axi_rready
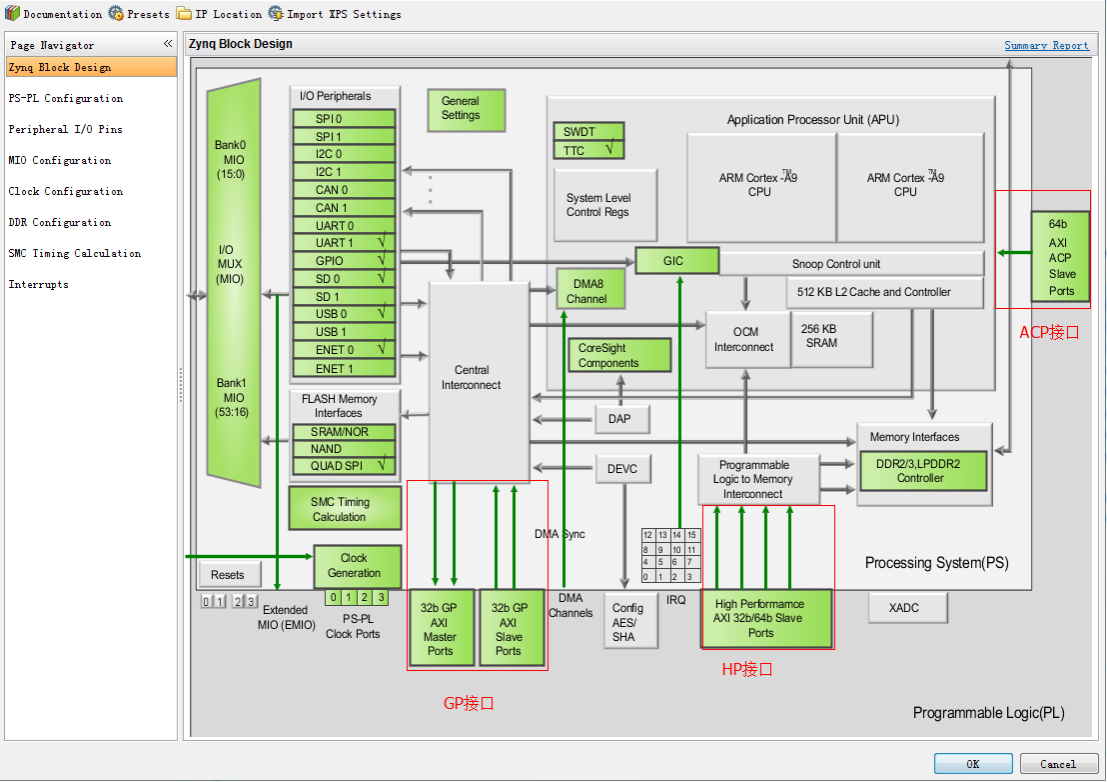
没错笔者曾在《AXI总线概述》这节中提到了他们,这次通过源码分析再次隆重介绍它们。


always @( posedge S_AXI_ACLK )
begin
if ( S_AXI_ARESETN == 'b0 )
begin
slv_reg0 <= ;
slv_reg1 <= ;
slv_reg2 <= ;
slv_reg3 <= ;
end
else begin
if (slv_reg_wren)
begin
case ( axi_awaddr[ADDR_LSB+OPT_MEM_ADDR_BITS:ADDR_LSB] )
'h0:
for ( byte_index = ; byte_index <= (C_S_AXI_DATA_WIDTH/)-; byte_index = byte_index+ )
if ( S_AXI_WSTRB[byte_index] == ) begin
// Respective byte enables are asserted as per write strobes
// Slave register 0
slv_reg0[(byte_index*) +: ] <= S_AXI_WDATA[(byte_index*) +: ];
end
'h1:
for ( byte_index = ; byte_index <= (C_S_AXI_DATA_WIDTH/)-; byte_index = byte_index+ )
if ( S_AXI_WSTRB[byte_index] == ) begin
// Respective byte enables are asserted as per write strobes
// Slave register 1
slv_reg1[(byte_index*) +: ] <= S_AXI_WDATA[(byte_index*) +: ];
end
'h2:
for ( byte_index = ; byte_index <= (C_S_AXI_DATA_WIDTH/)-; byte_index = byte_index+ )
if ( S_AXI_WSTRB[byte_index] == ) begin
// Respective byte enables are asserted as per write strobes
// Slave register 2
slv_reg2[(byte_index*) +: ] <= S_AXI_WDATA[(byte_index*) +: ];
end
'h3:
for ( byte_index = ; byte_index <= (C_S_AXI_DATA_WIDTH/)-; byte_index = byte_index+ )
if ( S_AXI_WSTRB[byte_index] == ) begin
// Respective byte enables are asserted as per write strobes
// Slave register 3
slv_reg3[(byte_index*) +: ] <= S_AXI_WDATA[(byte_index*) +: ];
end
default : begin
slv_reg0 <= slv_reg0;
slv_reg1 <= slv_reg1;
slv_reg2 <= slv_reg2;
slv_reg3 <= slv_reg3;
end
endcase
end
end
end
for ( byte_index = ; byte_index <= (C_S_AXI_DATA_WIDTH/)-; byte_index = byte_index+ )
if ( S_AXI_WSTRB[byte_index] == ) begin
slv_reg0[(byte_index*) +: ] <= S_AXI_WDATA[(byte_index*) +: ];
end
其中,C_S_AXI_DATA_WIDTH的宏定义的值为32,也就是数据位宽,S_AXI_WSTRB就是写选通信号,S_AXI_WDATA就是写数据信号。
存在于for循环中的最关键的一句:
slv_reg0[(byte_index*8) +: 8] <= S_AXI_WDATA[(byte_index*8) +: 8];
当byte_index = 0的时候这句话就等价于:
slv_reg0[7:0] <= S_AXI_WDATA[7:0];
当byte_index = 1的时候这句话就等价于:
slv_reg0[15:8] <= S_AXI_WDATA[15:8];
当byte_index = 2的时候这句话就等价于:
slv_reg0[23:16] <= S_AXI_WDATA[23:16];
当byte_index = 3的时候这句话就等价于:
slv_reg0[31:24] <= S_AXI_WDATA[31:24];
也就是说,只有当写选通信号为1时,它所对应S_AXI_WDATA的字节才会被读取。
读懂了这段话之后,我们就知道了,如果我们想得到PS写到总线上的数据,我们只需要读取slv_reg0的值即可。
那如果,我们想写数据到总线让PS读取该数据,我们该怎么做呢?我们继续来看有关RADTA读数据代码:
// Output register or memory read data
always @( posedge S_AXI_ACLK )
begin
if ( S_AXI_ARESETN == 'b0 )
begin
axi_rdata <= ;
end
else
begin
// When there is a valid read address (S_AXI_ARVALID) with
// acceptance of read address by the slave (axi_arready),
// output the read dada
if (slv_reg_rden)
begin
axi_rdata <= reg_data_out; // register read data
end
end
end
观察可知,当PS读取数据时,程序会把reg_data_out复制给axi_rdata(RADTA读数据)。我们继续追踪reg_data_out:
always @(*)
begin
// Address decoding for reading registers
case ( axi_araddr[ADDR_LSB+OPT_MEM_ADDR_BITS:ADDR_LSB] )
'h0 : reg_data_out <= slv_reg0;
'h1 : reg_data_out <= slv_reg1;
'h2 : reg_data_out <= slv_reg2;
'h3 : reg_data_out <= slv_reg3;
default : reg_data_out <= ;
endcase
end
和前面分析的一样此时通过判断axi_awaddr[3:2]的值来判断将那个值给reg_data_out上,同样当PS调用读取函数时,这里axi_awaddr[3:2]默认是0,所以我们只需要把slv_reg0替换成我们自己数据,就可以让PS通过总线读到我们提供的数据。
这里可能有的读者会问了,slv_reg0不是总线写过来的数据吗?因为笔者说过这个程序是Vivado为我们提供的例子,它这么做无非是想验证我写出去的值和我读进入的值相等。但是他怎么写确实会对初看代码的人造成困扰。
最后笔者提出一个问题,为什么写通道要比读通道多了一列应答通道,这是为什么呢?
首先,你要知道这个应答信号是干什么用的?

写应答,主要是回复主机你这个写过程是没有问题的,那读为什么不需要这个过程呢?

这时因为主机在读取数据时,从机可以直接通过读数据通道给主机反馈信息,因此就没有必要再来开辟一个单独的应答通道了。
小结:
如果我们想读AXI4_Lite总线上的数据时,只需关注slv_reg的数据,我们可自行添加一段代码,如:
reg [:]rlcd_rgb;
always @( posedge S_AXI_ACLK )
begin
if ( S_AXI_ARESETN == 'b0 )
begin
rlcd_rgb <= 'd0;
end
else
begin
rlcd_rgb <= slv_reg0[:];
end
end
assign lcd_rgb = rlcd_rgb;
如果我们想对AXI4_Lite信号写数据时,我们只需修改对reg_data_out的赋值,如:
//写总线测试修改!!!!!!!!!
wire[:]wlcd_xy;// = {10'd0,lcd_xy};
assign wlcd_xy = {'d0,lcd_xy};
assign slv_reg_rden = axi_arready & S_AXI_ARVALID & ~axi_rvalid;
always @(*)
begin
// Address decoding for reading registers
case ( axi_araddr[ADDR_LSB+OPT_MEM_ADDR_BITS:ADDR_LSB] )
'h0 : reg_data_out <= wlcd_xy;//slv_reg0;
'h1 : reg_data_out <= slv_reg1;
'h2 : reg_data_out <= slv_reg2;
'h3 : reg_data_out <= slv_reg3;
default : reg_data_out <= ;
endcase
end
最后强调下如果我们自定义的IP的地址被映射为0x43C00000,那么我们Xil_Out32(0x43C00000,Value)写的就是slv_reg0的值。如果地址偏移4位,如Xil_Out32(0x43C00000 + 4,Value) 写的就是slv_reg1的值,依次类推。
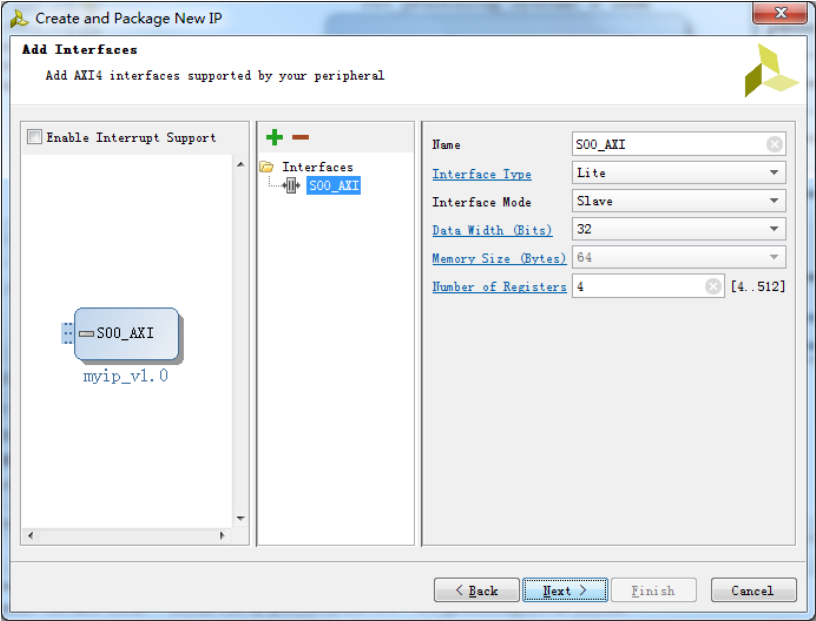
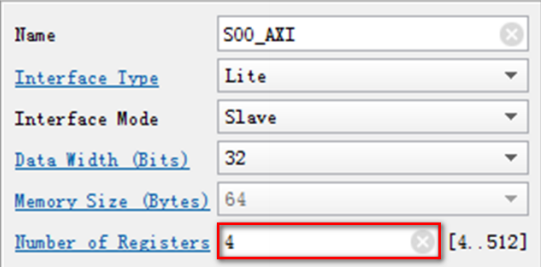
目前这里只有4个寄存器,那是因为之前选择的是4个,其实我们可以定义的更多:
#define XPAR_ MYIPFREQUENCY_ 0_ S00_ AXI_ BASEADDR 0x43C00000
#define XPAR_ MYIPFREQUENCY_ 0_ S00_ AXI_ HIGHADDR 0x43C0FFFF
理论上只要基地址 + 偏移量不要超过HIGHADDR即可。
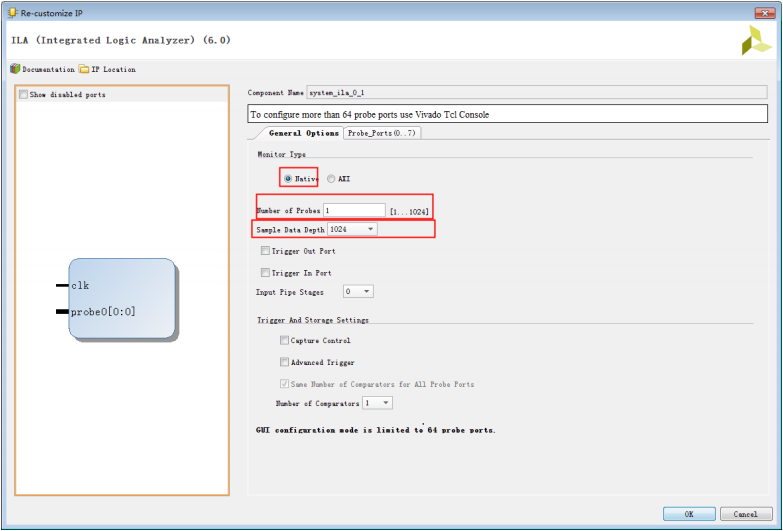
 添加 ila CORE
添加 ila CORE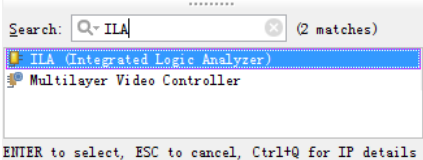



Step9:接下来依然是,右键单击Block文件,文件选择Generate the Output Products。
Step10:继续右键单击Block文件,选择Create a HDL wrapper,根据Block文件内容产生一个HDL 的顶层文件,并选择让vivado自动完成。
Setp11:单击Run Synthesis,如果有 Save 对话框弹出选择保存。
Setp12:综合结束后选择Synthesized Design option单击 OK。
Step13:在如下对话框中找到Unassigned debug nets(如果对话框没有出现选择 菜单->Window > Debug)

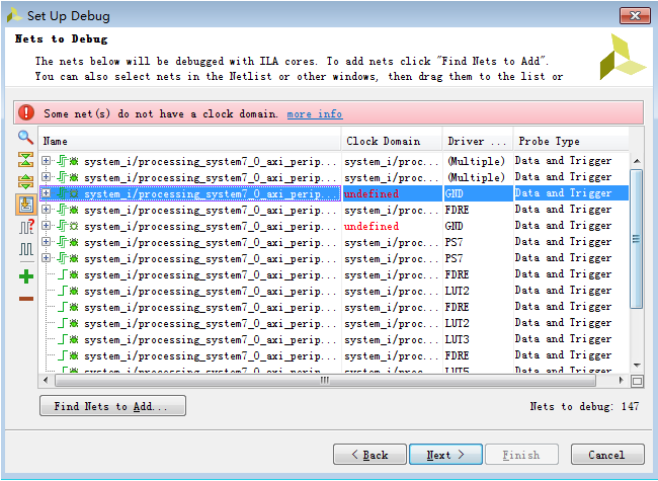
Step14:右击 Unassigned Debug Nets 选择Set up Debug… 之后单击 Next
Step15:删除红色错误的信号然后单击Next 到结束






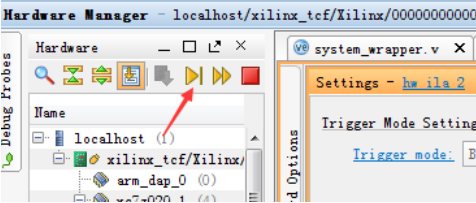

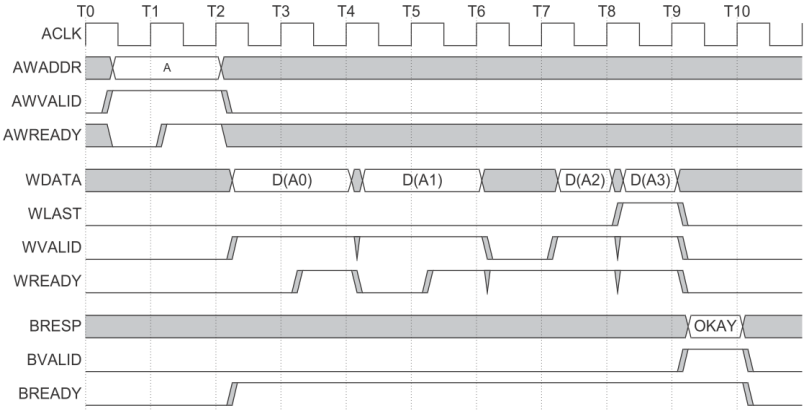
 后 VIVADO HW_ILA2 窗口采集到波形输出,可以看到 AXI总线的工作时序。
后 VIVADO HW_ILA2 窗口采集到波形输出,可以看到 AXI总线的工作时序。

【转】AXI_Lite 总线详解的更多相关文章
- S02_CH12_ AXI_Lite 总线详解
S02_CH12_ AXI_Lite 总线详解 12.1前言 ZYNQ拥有ARM+FPGA这个神奇的架构,那么ARM和FPGA究竟是如何进行通信的呢?本章通过剖析AXI总线源码,来一探其中的秘密. 1 ...
- Linux设备驱动模型之platform(平台)总线详解
/********************************************************/ 内核版本:2.6.35.7 运行平台:三星s5pv210 /*********** ...
- [CAN].CAN总线详解
转自:https://blog.csdn.net/cheatscat/article/details/82886889 CAN(Controller Area Network)总线协议是由 BOSCH ...
- [LIN].LIN总线详解
转自:https://www.2cto.com/kf/201806/754227.html 参考:https://wenku.baidu.com/view/a9b08d786bd97f192379e9 ...
- [SDIO].SDIO总线详解
转自:https://blog.csdn.net/liuhan33025/article/details/51131848 SDIO接口是在SD内存卡接口的基础上发展起来的接口,SDIO接口兼容以前的 ...
- [I2C].I2C总线详解
转自:https://www.cnblogs.com/BitArt/archive/2013/05/27/3101037.html 一. 基本信息 1. 概述 I²C 是Inter-Integrate ...
- SPI总线协议及SPI时序图详解
SPI,是英语Serial Peripheral Interface的缩写,顾名思义就是串行外围设备接口.SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚 ...
- 迅为4412开发板Linux驱动教程——总线_设备_驱动注册流程详解
本文转自:http://www.topeetboard.com 视频下载地址: 驱动注册:http://pan.baidu.com/s/1i34HcDB 设备注册:http://pan.baidu.c ...
- SPI总线协议及SPI时序图详解【转】
转自:https://www.cnblogs.com/adylee/p/5399742.html SPI,是英语Serial Peripheral Interface的缩写,顾名思义就是串行外围设备接 ...
随机推荐
- 安装Docker报container-selinux >= 2.9错
Docker装了无数次,还是会遇到如此熟悉的问题,知道他是版本需要更新,但是就是找不到对应的,在网上找了差不多一个下午都没弄好.发现平时还是要多动脑子才行,既然知道是版本需要更新,那么到官网直接找版本 ...
- js 数组 添加或删除 元素 splice 创建一个新的数组,新数组中的元素是通过检查指定数组中符合条件的所有元素 filter
里面可以用 箭头函数 splice 删除 增加 数组 中元素 操作数组 filter 创建新数组 检查指定数组中符合条件的所有元素
- 【Spring AOP】Spring AOP之如何通过注解的方式实现各种通知类型的AOP操作进阶篇(3)
一.切入点表达式的各种类型 切入点表达式的作用:限制连接点的匹配(满足时对应的aspect方法会被执行) 1)execution:用于匹配方法执行连接点.Spring AOP用户可能最经常使用exec ...
- shell脚本如何判断文件大小
转自:https://blog.csdn.net/lovegengxin/article/details/80762329 1 .ls -lls -l $filename | awk '{print ...
- JAVA并发-同步器AQS
什么是AQS aqs全称为AbstractQueuedSynchronizer,它提供了一个FIFO队列,可以看成是一个用来实现同步锁以及其他涉及到同步功能的核心组件,常见的有:ReentrantLo ...
- 新版Notepad++加十六进制查看的插件HexEditor(转载+总结)
用到hex文件查看,老版本的notepad++是可以安装的,新版本的是安装不了,这个差评啊, 但是网上有方法:https://github.com/chcg/NPP_HexEdit/releases下 ...
- 洛谷 P1443
P1443 所属知识点:BFS 传送门 题意 : 给你一个矩阵和一匹马一开始的位置.然后问你在这个矩阵里边跳到每一个点需要多少步. 思路: 因为一匹马从一个点可以跳到的位置如下图: 画的不好请见谅.. ...
- 【线段树】【P5522】[yLOI2019] 棠梨煎雪
C [yLOI2019] 棠梨煎雪 Background 岁岁花藻檐下共将棠梨煎雪 自总角至你我某日辗转天边 天淡天青 宿雨沾襟 一年一会信笺却只见寥寥数言 --银临<棠梨煎雪> Desc ...
- React 获取真实Dom v8.6.2版本
<!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8&quo ...
- px转rem vue vscode
1.vscode中安装px2rem 2.打开settings.json ,新增 "px2rem.rootFontSize": 75, 3.重启vscode 4.可以转换了