Games 103 cloth PDB 浅析
简介
PDB 比 隐式积分法 速度快很多.
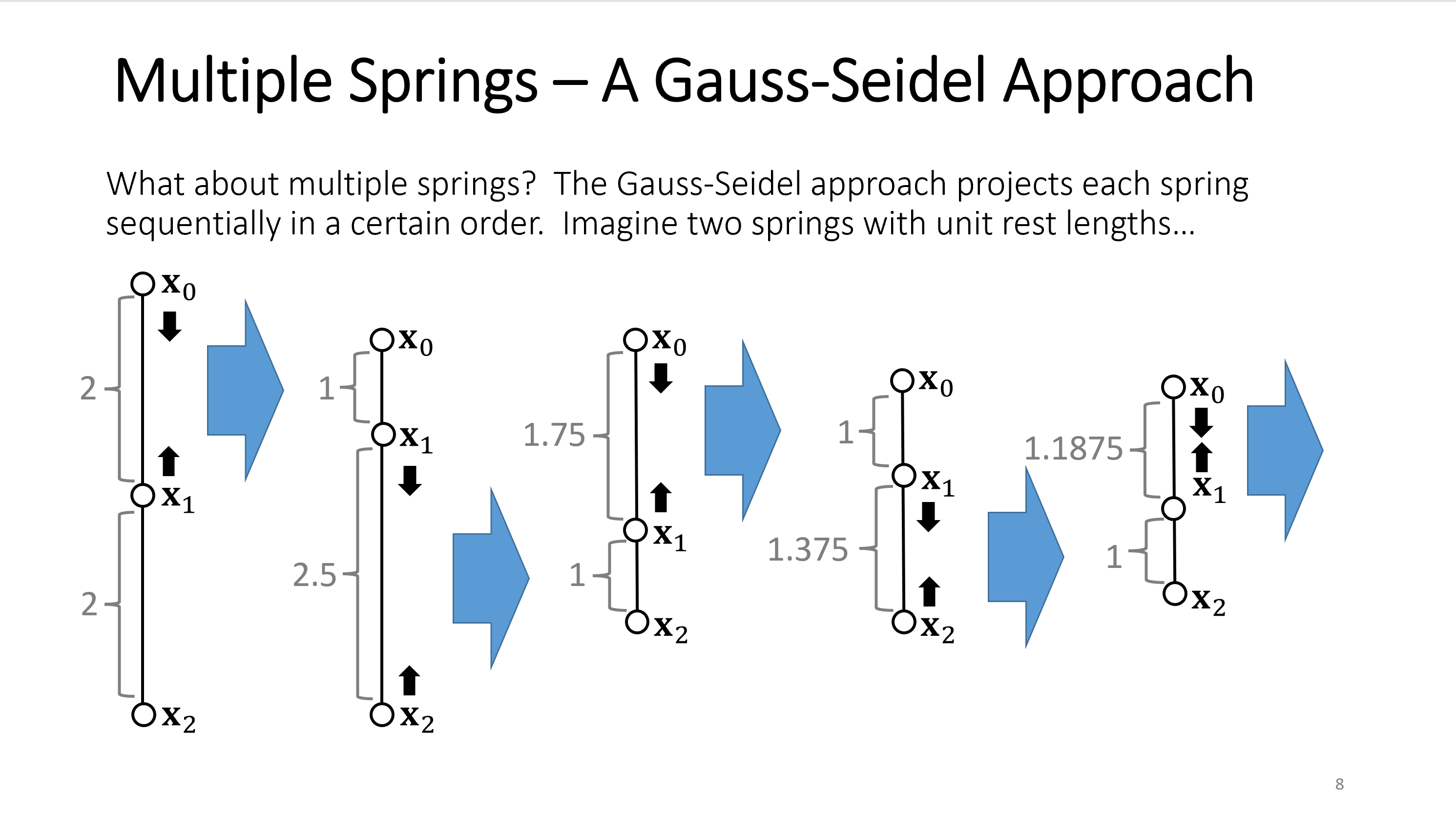
全称 Position Based Dynamics 粒子动力学系统, 什么是PBD呢? 个人的理解就是, 多次迭代, 达到一步的稳定状态. 然后更新整个系统的状态. 简单的说, 就是对于局部的模拟扩展到全局. 经过一定的迭代, 达到稳态.
可以参看Image中的第一幅图片. 对于单个系统的更新, 导致的全局的收敛. 但是必须达到多次迭代, 才能达到类似整体的一次迭代.
参考文献
师弟代码~~
Q&A
Q1
In the Update function, set up the PBD solver as a particle system. Specifically, for every vertex, damp the velocity (as in 1.a), update the velocity by gravity, and finally
update the position:
\]
简单而言就是, 改变速度. 通过重力改变, 然后加上速度衰减, 然后根据速度的改变更新坐标.
V[i] += g * t;
V[i] *= damping;
X[i] += t * V[i];
Q2
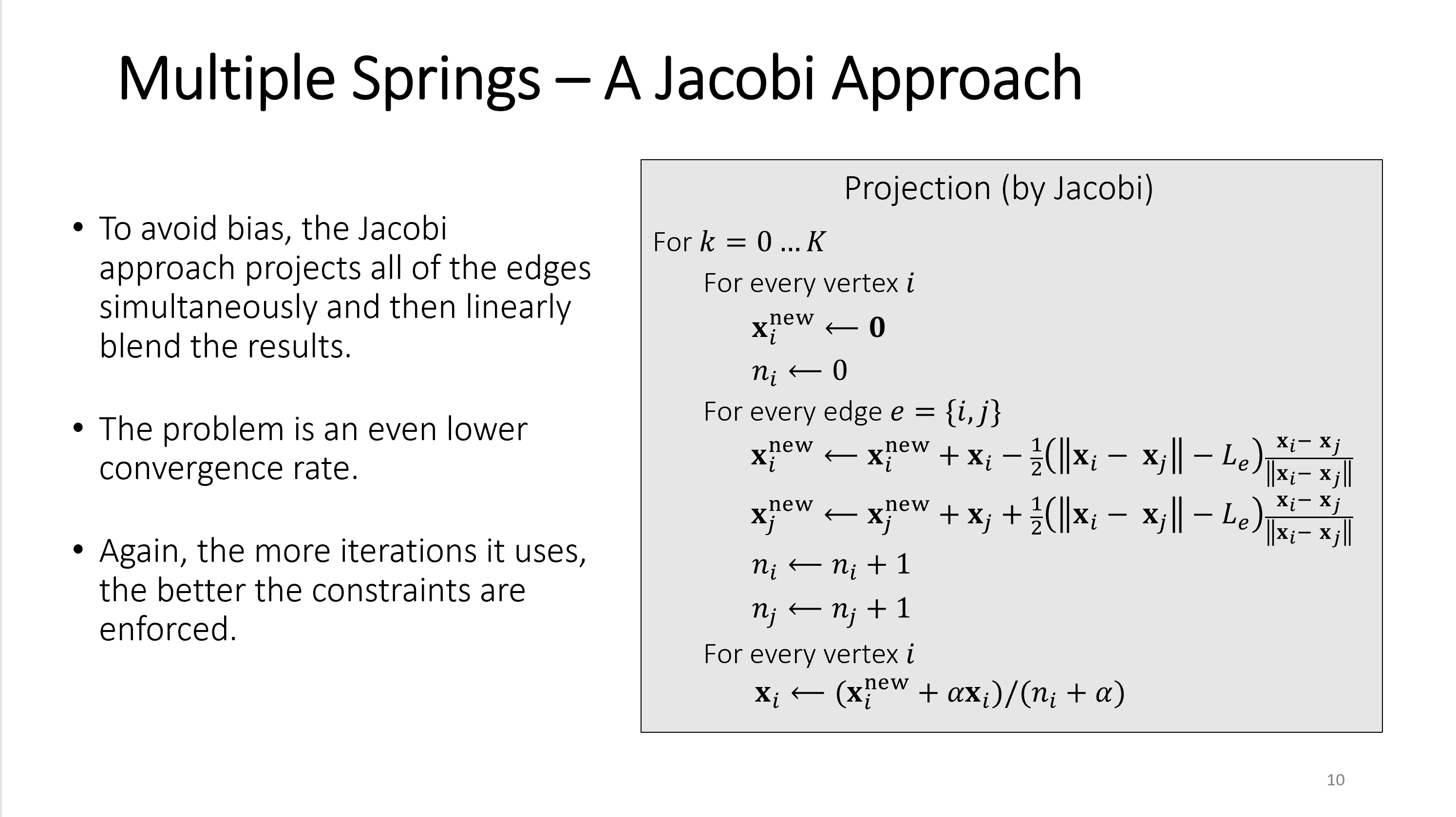
1.b. Strain limiting (4 Points) In the Strain Limiting function, implement position-based
dynamics in a Jacobi fashion. The basic idea is to define two temporary arrays sum x[] and sum n[]
to store the sums of vertex position updates and vertex count updates. At the beginning of the
function, set both arrays to zeros. After that, for every edge e connecting i and j, update the arrays:
\operatorname{sum}_{\mathbf{}} \mathbf{x}_{i} \leftarrow \operatorname{sum}_{-} \mathbf{x}_{i}+\frac{1}{2}\left(\mathbf{x}_{i}+\mathbf{x}_{j}+L_{e} \frac{\mathbf{x}_{i}-\mathbf{x}_{j}}{\left\|\mathbf{x}_{i}-\mathbf{x}_{j}\right\|}\right), & \text { sum_n }_{i} \leftarrow \text { sum_n }_{i}+1, \\
\text { sum_ } \mathbf{x}_{j} \leftarrow \text { sum_ } \mathbf{x}_{j}+\frac{1}{2}\left(\mathbf{x}_{i}+\mathbf{x}_{j}-L_{e} \frac{\mathbf{x}_{i}-\mathbf{x}_{j}}{\left\|\mathbf{x}_{i}-\mathbf{x}_{j}\right\|} \|,\right. & \text { sum_n }_{j} \leftarrow \text { sum_ } n_{j}+1 .
\end{array}
\]
Finally, update each vertex as:
\]
作者给出的 \(\alpha = 0.2f\) 可以参考最后一张图.
void Strain_Limiting()
{
Mesh mesh = GetComponent<MeshFilter> ().mesh;
Vector3[] vertices = mesh.vertices;
//Apply PBD here.
Vector3[] sum_x = new Vector3[vertices.Length];
int[] num_x = new int[vertices.Length];
for(int i=0; i<vertices.Length; i++)
{
sum_x[i] = new Vector3(0, 0, 0);
num_x[i] = 0;
}
for(int ei = 0; ei < L.Length; ei++)
{
int i = E[ei * 2];
int j = E[ei * 2 + 1];
Vector3 xi_xj = vertices[i] - vertices[j];
float len_ij = L[ei] / xi_xj.magnitude;
sum_x[i] += (vertices[i] + vertices[j] + len_ij * (xi_xj)) / 2;
sum_x[j] += (vertices[i] + vertices[j] - len_ij * (xi_xj)) / 2;
num_x[i]++;
num_x[j]++;
}
for(int i=0; i<vertices.Length; i++)
{
if (i == 0 || i == 20) continue;
V[i] += ((0.2f * vertices[i] + sum_x[i]) / (num_x[i] + 0.2f) -
vertices[i]) / t;
vertices[i] = (0.2f * vertices[i] + sum_x[i]) / (num_x[i] + 0.2f);
}
mesh.vertices = vertices;
}
image
code
using UnityEngine;
using System.Collections;
public class PBD_model: MonoBehaviour {
float t= 0.0333f;
float damping= 0.99f;
int[] E;
float[] L;
Vector3[] V;
Vector3 g = new Vector3(0, -9.8f, 0);
float r = 2.7f;
// Use this for initialization
void Start ()
{
Mesh mesh = GetComponent<MeshFilter> ().mesh;
//Resize the mesh.
int n=21;
Vector3[] X = new Vector3[n*n];
Vector2[] UV = new Vector2[n*n];
int[] T = new int[(n-1)*(n-1)*6];
for(int j=0; j<n; j++)
for(int i=0; i<n; i++)
{
X[j*n+i] =new Vector3(5-10.0f*i/(n-1), 0, 5-10.0f*j/(n-1));
UV[j*n+i]=new Vector3(i/(n-1.0f), j/(n-1.0f));
}
int t=0;
for(int j=0; j<n-1; j++)
for(int i=0; i<n-1; i++)
{
T[t*6+0]=j*n+i;
T[t*6+1]=j*n+i+1;
T[t*6+2]=(j+1)*n+i+1;
T[t*6+3]=j*n+i;
T[t*6+4]=(j+1)*n+i+1;
T[t*6+5]=(j+1)*n+i;
t++;
}
mesh.vertices = X;
mesh.triangles = T;
mesh.uv = UV;
mesh.RecalculateNormals ();
//Construct the original edge list
int[] _E = new int[T.Length*2];
for (int i=0; i<T.Length; i+=3)
{
_E[i*2+0]=T[i+0];
_E[i*2+1]=T[i+1];
_E[i*2+2]=T[i+1];
_E[i*2+3]=T[i+2];
_E[i*2+4]=T[i+2];
_E[i*2+5]=T[i+0];
}
//Reorder the original edge list
for (int i=0; i<_E.Length; i+=2)
if(_E[i] > _E[i + 1])
Swap(ref _E[i], ref _E[i+1]);
//Sort the original edge list using quicksort
Quick_Sort (ref _E, 0, _E.Length/2-1);
int e_number = 0;
for (int i=0; i<_E.Length; i+=2)
if (i == 0 || _E [i + 0] != _E [i - 2] || _E [i + 1] != _E [i - 1])
e_number++;
E = new int[e_number * 2];
for (int i=0, e=0; i<_E.Length; i+=2)
if (i == 0 || _E [i + 0] != _E [i - 2] || _E [i + 1] != _E [i - 1])
{
E[e*2+0]=_E [i + 0];
E[e*2+1]=_E [i + 1];
e++;
}
L = new float[E.Length/2];
for (int e=0; e<E.Length/2; e++)
{
int i = E[e*2+0];
int j = E[e*2+1];
L[e]=(X[i]-X[j]).magnitude;
}
V = new Vector3[X.Length];
for (int i=0; i<X.Length; i++)
V[i] = new Vector3 (0, 0, 0);
}
void Quick_Sort(ref int[] a, int l, int r)
{
int j;
if(l<r)
{
j=Quick_Sort_Partition(ref a, l, r);
Quick_Sort (ref a, l, j-1);
Quick_Sort (ref a, j+1, r);
}
}
int Quick_Sort_Partition(ref int[] a, int l, int r)
{
int pivot_0, pivot_1, i, j;
pivot_0 = a [l * 2 + 0];
pivot_1 = a [l * 2 + 1];
i = l;
j = r + 1;
while (true)
{
do ++i; while( i<=r && (a[i*2]<pivot_0 || a[i*2]==pivot_0 && a[i*2+1]<=pivot_1));
do --j; while( a[j*2]>pivot_0 || a[j*2]==pivot_0 && a[j*2+1]> pivot_1);
if(i>=j) break;
Swap(ref a[i*2], ref a[j*2]);
Swap(ref a[i*2+1], ref a[j*2+1]);
}
Swap (ref a [l * 2 + 0], ref a [j * 2 + 0]);
Swap (ref a [l * 2 + 1], ref a [j * 2 + 1]);
return j;
}
void Swap(ref int a, ref int b)
{
int temp = a;
a = b;
b = temp;
}
void Strain_Limiting()
{
Mesh mesh = GetComponent<MeshFilter> ().mesh;
Vector3[] vertices = mesh.vertices;
//Apply PBD here.
Vector3[] sum_x = new Vector3[vertices.Length];
int[] num_x = new int[vertices.Length];
for(int i=0; i<vertices.Length; i++)
{
sum_x[i] = new Vector3(0, 0, 0);
num_x[i] = 0;
}
for(int ei = 0; ei < L.Length; ei++)
{
int i = E[ei * 2];
int j = E[ei * 2 + 1];
Vector3 xi_xj = vertices[i] - vertices[j];
float len_ij = L[ei] / xi_xj.magnitude;
sum_x[i] += (vertices[i] + vertices[j] + len_ij * (xi_xj)) / 2;
sum_x[j] += (vertices[i] + vertices[j] - len_ij * (xi_xj)) / 2;
num_x[i]++;
num_x[j]++;
}
for(int i=0; i<vertices.Length; i++)
{
if (i == 0 || i == 20) continue;
V[i] += ((0.2f * vertices[i] + sum_x[i]) / (num_x[i] + 0.2f) -
vertices[i]) / t;
vertices[i] = (0.2f * vertices[i] + sum_x[i]) / (num_x[i] + 0.2f);
}
mesh.vertices = vertices;
}
void Collision_Handling()
{
Mesh mesh = GetComponent<MeshFilter> ().mesh;
Vector3[] X = mesh.vertices;
//For every vertex, detect collision and apply impulse if needed.
GameObject sphere = GameObject.Find("Sphere");
Vector3 c = sphere.transform.position;
//Handle colllision.
for (int i = 0; i < X.Length; i++)
{
if (i == 0 || i == 20) continue;
float distance = (X[i] - c).magnitude;
if (distance < r)
{
V[i] += (c + r * (X[i] - c) / distance - X[i]) / t;
X[i] = c + r * (X[i] - c) / distance;
}
}
mesh.vertices = X;
}
// Update is called once per frame
void Update ()
{
Mesh mesh = GetComponent<MeshFilter> ().mesh;
Vector3[] X = mesh.vertices;
for(int i=0; i<X.Length; i++)
{
if(i==0 || i==20) continue;
//Initial Setup
V[i] += g * t;
V[i] *= damping;
X[i] += t * V[i];
}
mesh.vertices = X;
for(int l=0; l<32; l++)
Strain_Limiting ();
Collision_Handling ();
mesh.RecalculateNormals ();
}
}
Games 103 cloth PDB 浅析的更多相关文章
- ORACLE 12C PDB 维护基础介绍
来自:http://www.xifenfei.com/2013/05/oracle-12c-pdb-%E7%AE%A1%E7%90%86%E4%BB%8B%E7%BB%8D1.html CDB和PDB ...
- PDB Files: What Every Developer Must Know
Reference: http://www.wintellect.com/blogs/jrobbins/pdb-files-what-every-developer-must-know Most d ...
- Linux系统编程——进程调度浅析
概述 操作系统要实现多进程.进程调度不可缺少. 有人说,进程调度是操作系统中最为重要的一个部分.我认为这样的说法说得太绝对了一点,就像非常多人动辄就说"某某函数比某某函数效率高XX倍&quo ...
- 安装12C小问题及pdb表空间配置
安装12C小问题及pdb表空间配置 一.安装 1.RPM包 #安装12C需要安装的rpm包,官网搜索,做个记录 bc binutils-2.23.52.0.1-12.el7(x86_64) compa ...
- Oracle 12c CDB PDB
先说基本用法: 先按11G之前进行 conn / as sysdba; create user test identifed by test; ORA-65096: 公用用户名或角色名无效. 查官方文 ...
- pdb文件及引发的思考
最初只想知道线上iis里需要不需要pdb文件,了解部分之后对于.net底层产生了浓厚的兴趣,看了一点点资料 资料来源: https://www.cnblogs.com/itech/archive/20 ...
- 2018ACM山东省赛 Games(dp取数)
Games Time Limit: 1000 ms Memory Limit: 65536 KiB Submit Statistic Problem Description Alice and Bob ...
- objectARX2010及其以上版本使用publish打印(发布)图纸,后台布局打印图纸例子浅析
AutoCAD 2010版本开始新增了一个发布图纸的功能,可以后台打印图纸,以下是ADN官方博客例子浅析 原文地址 https://adndevblog.typepad.com/autocad/201 ...
- Oracle 12c 多租户家族(12c 18c 19c)如何在 PDB 中添加 HR 模式
Oracle 12c 多租户家族(12c [12.2.0.1].18c [12.2.0.2].19c [12.2.0.3])如何在 PDB 中添加模式:19c (19.3) 手工添加示例 HR 用户 ...
- protobuf 协议浅析
目录 Protobuf 协议浅析 1. Protobuf 介绍 1.1 Protobuf 基本概念 1.2 Protobuf 的优点 1.3 Protobuf, JSON, XML 的区别 2. Pr ...
随机推荐
- 测试用例Xmind转XML格式教程
运行环境: Python版本:3.7(Python2.x和Python2.x均可) 第三方库:xmind2testlink/xmind2testcase 1.安装Python(以Python3.x为例 ...
- Goland搭建Go开发环境
1.下载和安装Golang 下载链接: 谷歌链接:https://golang.google.cn/dl/ 国内链接:https://studygolang.com/dl 安装示意图: 安装完成后配置 ...
- 多线程的waiting与notify
一.waiting()与notify() /* 进入到TimeWaiting(计时等待)有两种方式 1.使用sleep(long m)方法,在毫秒值结束之后,线程睡醒进入到Runnable/Block ...
- TVM:使用自动调度优化算子
与基于模板的AutoTVM不同(会依赖手动模板定义搜索空间),自动调度器不需要任何模板.用户只需要编写计算声明,而不需要任何调度命令或模板.自动调度器可以自动生产一个大的搜索空间,并在空间中找到一个好 ...
- 操作系统:Linux如何获取所有设备信息
本节了解下Linux是如何管理设备的,将从Linux如何组织设备开始,然后研究设备相关的数据结构,最后写一个Linux设备驱动实例. 感受一下Linux下的设备信息 Linux的设计哲学是一起皆是文件 ...
- CSS 之overflow属性简结
CSS的overflow 属性用来处理一个元素的尺寸超出其容器尺寸的情况.当一个元素包含的内容超粗自身的大小时,就会发生内容溢出,这种情况,可以对内容进行"裁剪",只让一部分内容可 ...
- B1036 跟奥巴马一起编程
美国总统奥巴马不仅呼吁所有人都学习编程,甚至以身作则编写代码,成为美国历史上首位编写计算机代码的总统.2014年底,为庆祝"计算机科学教育周"正式启动,奥巴马编写了很简单的计算机代 ...
- codeup之查找
Description 输入数组长度 n 输入数组 a[1-n] 输入查找个数m 输入查找数字b[1-m] 输出 YES or NO 查找有则YES 否则NO . Input 输入有多组数据. 每组输 ...
- 【最新】MySQL 5.6 保姆级安装详细教程
MySQL5.6简介 MySQL 5.6 是 MySQL 数据库管理系统的一个重要版本,以其稳定性.性能优化和功能扩充受到广泛关注与使用.该版本在数据库领域中提供了更加高效的数据处理能力.增强的复制功 ...
- 布局控件:Grid和StackPanel
布局控件:Grid和StackPanel 本文同时为b站WPF课程的笔记,相关示例代码 一个窗口顶上的部分叫做非客户区,下面的部分叫做客户区域.非客户区域主要就是一个Title和三个窗口样式按钮.我们 ...