ubuntu12.04+fuerte 下跑通lsd-slam——数据集
lsd-slam(下载链接:https://github.com/tum-vision/lsd_slam)提供了两种方法,一种是用数据集(下载地址http://vision.in.tum.de/lsdslam),一种是用usb摄像头,github也有相应的使用说明,不是很详细,下面介绍我的步骤.ps:也是一个slam新手,很多东西不懂,有错误的地方请大家指出
环境:ubuntu12.04+fuerte
目标:使用数据集,跑通lsd-slam
1.安装ubuntu12.04。我装的是双系统,不太建议用虚拟机,最开始使用虚拟机没有成功,后来换成了双系统
2.安装fuerte。按照http://wiki.ros.org/fuerte/Installation/Ubuntu这个教程来,接着是设置ROS环境,按照http://wiki.ros.org/ROS/Tutorials/InstallingandConfiguringROSEnvironment这个步骤来,注意第4步,要选择rosbuild,此处
source ~/fuerte_workspace/setup.bash
如果这样设置,只对当前shell有效,导致每开一个新的shell都需要执行上述这条命令,可以添加环境变量
echo "source ~/fuerte_workspace/setup.bash" >> ~/.bashrc
source ~/.bashrc
这样一次修改,永久有效。
3.在shell中执行
roscore
结果:
roscore要一直运行
4.打开一个新的shell,执行
rosrun lsd_slam_viewer viewer
结果:

可以看到PointCloud Viewer中什么都没有显示
5.打开一个新的shell,执行
rosrun lsd_slam_core dataset_slam _files:=<files> _hz:=<hz> _calib:=<calibration_file>
<files>表示数据集中图片的存放路径,<hz>表示帧率,可以为0,<calibration_file>表示校正文件的路径,如我的
rosrun lsd_slam_core dataset_slam _files:=/home/xtl/fuerte_workspace/sandbox/LSD_room_images/LSD_room/images _hz:=0 _calib:=/home/xtl/fuerte_workspace/sandbox/LSD_room_images/LSD_room/cameraCalibration.cfg
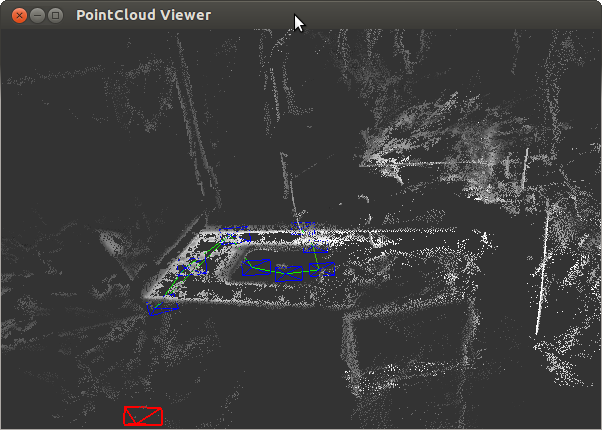
结果
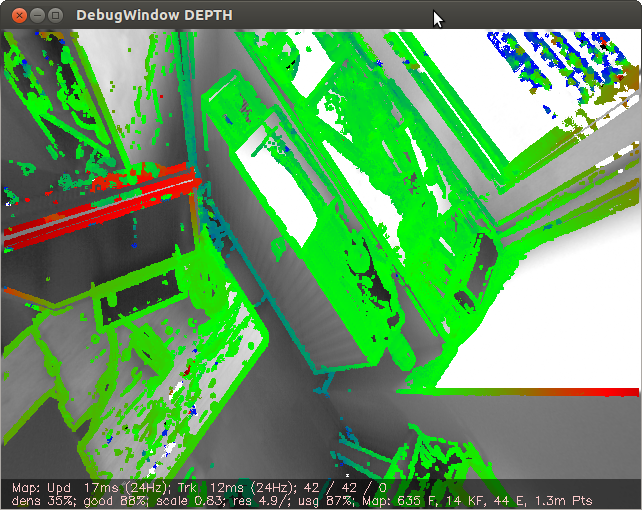
同时Point Cloud Viewer中显示出点云
下一篇将介绍如何使用usb摄像头跑lsd-slam。
原创文章,转载请注明出处
ubuntu12.04+fuerte 下跑通lsd-slam——数据集的更多相关文章
- ubuntu12.04+fuerte 下跑通lsd-slam——使用usb摄像头
上一篇介绍了如何使用数据集跑lsd-slam,这篇介绍如何用一个普通的usb摄像头跑lsd-slam,默认ubuntu12.04,fuerte已经安装好,workspace也已设置,如果没有,请参考上 ...
- Ubuntu12.04(64bit)下安装Qt4总结
本文主要介绍linux系统Ubuntu12.04(64bit)下Qt4.8.5的安装,其中还涉及Fedora9下Qt4的安装. 1.下载软件:去Qt的官网下载Qt4.8.5和Qt Creator软件, ...
- ubuntu-12.04.1-desktop-x64下JDK环境的安装与配置
1.上oracle官网下载最新的JDK.在这里,我的系统是ubuntu-12.04.1-desktop-amd64,目前位置JDK的最新版本位7u9.jdk-for-linux有两种安装包,一种是rp ...
- Ubuntu下跑通py-faster-rcnn、详解demo运作流程
在不同的服务器不同的机器上做过很多次实验,分别遇到各种不一样的错误并且跑通Py-Faster-RCNN,因此,在这里做一个流程的汇总: 一.下载文件: 首先,文件的下载可以有两种途径: 1.需要在官网 ...
- ubuntu-12.04.5下编译openjdk8
bash ./configure --with-target-bits=64 --with-boot-jdk=/usr/java/jdk1.7.0_80/ --with-debug-level=slo ...
- 阿里云ubuntu12.04环境下配置Apache+PHP+PHPmyadmin+MYsql
此教程中使用的相关IP等设置,在你的环境中要做相应修改. 使用之前更新apt-get,因为服务器基本上是一个裸系统 apt-get update;apt-get upgrade; 1 我们使用root ...
- 【转】Ubuntu12.04 LTS下环境变量设置
原文网址:http://blog.chinaunix.net/uid-26963688-id-3221439.html 1.设置当前用户环境变量(对root用户无效) 打开终端输入:light@cha ...
- Ubuntu12.04 64bit 下安装VNC server
1. 安装gonme核心包(如果是字符界面的话) apt-get install x-window-system-coreapt-get install gnome-core (下载完成后需要安装dg ...
- Ubuntu12.04下eclipse提示框黑色背景色的修改方法
eclipse提示框的背景颜色使用的是系统的提示框颜色配置,在windows下为黄色,但在Ubuntu12.04(gnome)下却是黑色,造成提示内容很难看清. 在eclipse中我们是无法修改这个颜 ...
随机推荐
- ibdata1文件--缩小mysql数据库的ibdata1文件
摘要 在MySQL数据库中,如果不指定innodb_file_per_table参数,单独存在每个表的数据,MySQL的数据都会存放在ibdata1文件. mysql ibdata1存放数据,索引等, ...
- nginx初级安装配置
nginx初级安装配置 转自:(lykyl原创)http://www.cnblogs.com/lykyl/archive/2012/11/21/2781077.html 实验环境:系统 CENTOS5 ...
- Preface
I'd never given much thought to how I would die — 我从来没有想过我会怎么样死 much thought 仔细思考 我从未仔细思考过,我将如何死去 th ...
- D. Bear and Two Paths(贪心构造)
D. Bear and Two Paths time limit per test 2 seconds memory limit per test 256 megabytes input standa ...
- 转 使用 HttpClient 4 进行文件上传
http://www.tuicool.com/articles/Y7reYb 1. 概述 本教程我们将描述如何使用 HttpClient 4进行一次多文件上传操作 . 我们将使用 http://ec ...
- linux command ---1
查看Linux的内核版本 当前系统的发行版信息(distribution):lsb_release -a , lsb(linux standard Base) and distribution inf ...
- H2最完整的资料下载地址:
淡泊以明志,宁静以致远 博客园 首页 新随笔 联系 管理 订阅 随笔- 678 文章- 0 评论- 137 H2 database的使用 H2最完整的资料下载地址: http://downl ...
- Linux 最简单的驱动程序hello world
图片驱动位置:kernel3-10/driver/misc/mediatek/imgsensor/src/mt8127/kd_sensorlist.c 例子:kernel-3.10/driver/mi ...
- Java语言的学习
众所周知,Java是上个世纪的语言产物,到现在已经有多个分支,Java和OC.Swift一样都是面向对象的语言,目前学习Java是想接触一下后台的开发,当然iOS也不会丢掉,毕竟多学一点不是坏事. 今 ...
- Docker Swarm集群
Docker Swarm集群 IP 10.6.17.11 管理节点 IP 10.6.17.12 节点A IP 10.6.17.13 节点B IP 10.6.17.14 节点C 安装 Sw ...