matlab练习程序(BRIEF描述子)
BRIEF特征全称:Binary Robust Independent Elementary Features。是一种能够快速计算图像特征描述符的方法,同样能够降低特征匹配的时间。
算法计算步骤如下:
1.首先对一张图像计算其特征点,这里就用matlab自带的harris角点检测了,harris代码细节可以参考这一篇博客。
2.对图像进行高斯滤波,这里选用9*9矩阵,主要是为了去除随机噪点。
3.以特征点为中心,取SxS的邻域窗口。在窗口内随机选取一对(两个)点,比较二者像素的大小,进行如下二进制赋值。
其中,p(x),p(y)分别是随机点x=(u1,v1),y=(u2,v2)的像素值。
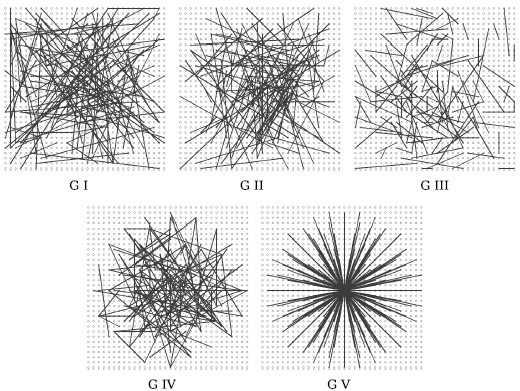
4.选窗口内随机点对的策略有以下五种方法,推荐第二种:

对应的邻域随机点对图像如下(一条线段的两个端点是一对):
5.最终就得到了多组二进制编码,后续匹配可以利用编码距离来确定特征点的相似度。
一定要注意的是后续匹配要选用相同的点对,所以这组点对是要保留的。
matlab代码如下:
clear all;
close all;
clc; R = ; %特征邻域窗口直径
K = ; %高斯滤波半径
N = ; %特征位数 img=imread('lena.jpg');
imshow(img)
[h,w]=size(img); p = detectHarrisFeatures(img); %系统自带的检测harris角点
p = p.Location; p = p(p(:,)>R & p(:,)<h-R & ... %将太靠近边界的特征点去掉,避免邻域随机点越界
p(:,)>R & p(:,)<w-R,:); H=fspecial('gaussian',[K K],); %高斯平滑
img=imfilter(img,H,'replicate'); s = normrnd(,R/,N,); %生成邻域中随机点对GII
figure; %显示一下
for i=:N
plot(s(i,:),s(i,:));
hold on;
end tao = zeros(length(p),N);
for i=:length(p) %生成所有特征点的brief描述子
px = floor(p(i,:) + s(:,:)); %懒得插值提亚像素值了,直接最邻近
py = floor(p(i,:) + s(:,:)); for j=:N
if img(px(j,),px(j,)) < img(py(j,),py(j,))
tao(i,j) = ;
else
tao(i,j) = ;
end
end img(floor(p(i,)),floor(p(i,))) = ;
end
figure; %显示harris角点
imshow(img,[]) figure; %显示一下描述子
imshow(tao,[])
结果如下:
原图:

Harris特征点:

邻域随机点对,这里使用GII:

BRIEF描述子,这里可视化了:
参考:https://blog.csdn.net/hujingshuang/article/details/46910259
matlab练习程序(BRIEF描述子)的更多相关文章
- Brief描述子
一.Brief算法 1.基本原理 BRIEF是2010年的一篇名为<BRIEF:Binary Robust Independent Elementary Features>的文章中提出,B ...
- Opencv Surf算子中keyPoints,描述子Mat矩阵,配对向量DMatch里都包含了哪些好玩的东东?
Surf算法是一把牛刀,我们可以很轻易的从网上或各种Opencv教程里找到Surf的用例,把例程中的代码或贴或敲过来,满心期待的按下F5,当屏幕终于被满屏花花绿绿的小圆点或者N多道连接线条霸占时,内心 ...
- BRIEF 特征描述子
Binary Robust Independent Elementary Features www.cnblogs.com/ronny 1. BRIEF的基本原理 我们已经知道SIFT特征采用了128 ...
- matlab练习程序(SUSAN检测)
matlab练习程序(SUSAN检测) SUSAN算子既可以检测角点也可以检测边缘,不过角点似乎比不过harris,边缘似乎比不过Canny.不过思想还是有点意思的. 主要思想就是:首先做一个和原图像 ...
- 基于HOG-3D的时空描述子
作者提出一种新的基于局部描述子的行为识别算法.
- SIFT算法:特征描述子
SIFT算法:DoG尺度空间生产 SIFT算法:KeyPoint找寻.定位与优化 SIFT算法:确定特征点方向 SIFT算法:特征描述子 目录: 1.确定描述子采样区域 2.生成描述子 2.1 旋 ...
- SIFT解析(三)生成特征描述子
以上两篇文章中检测在DOG空间中稳定的特征点,lowe已经提到这些特征点是比Harris角点等特征还要稳定的特征.下一步骤我们要考虑的就是如何去很好地描述这些DOG特征点. 下面好好说说如何来描述这些 ...
- (二)ORB描述子提取源码思路与实现
ORBSLAM2中ORB特征提取的特点 ORBSLAM2中通过对OpenCV中的ORB特征点提取类进行修改,对图像进行分块提取,而后划分节点,使得每个节点中保存的特征点性能是该节点所有特征点中最好的. ...
- (一)ORB描述子提取
ORBSLAM2中使用ORB描述子的方法 经典的视觉SLAM系统大体分为两种:其一是基于特征点法的,其二是基于直接法的.那么本文主要就讲特征点法的SLAM. 基于特征点法的视觉SLAM系统典型的有PT ...
随机推荐
- MyBatis初体验
一.MyBatis 1.简介 曾命名IBatis(老版本), 交给Google维护后,改名为MyBatis(新版本).学习文档: https://mybatis.org/mybatis-3/zh/in ...
- CSS入门(css简介与样式汇总、CSS的使用方式和特征、CSS基础选择器和复杂选择器、边框阴影)
一.CSS的作用 1.以统一的方式实现样式的定义 2.提高页面样式的可重用性和可维护性 3.实现了内容(HTML)和表示(CSS)的分离 HTML和CSS之间有什么关系? HTML:构建网页的结构 C ...
- mybatis+sqlServer 实现insertOrUpdate
这两天遇到一个头疼的问题,我们系统需要请求第三方数据,第三方收到请求后会生成相应的数据并入库,我们通过定时任务将第三方数据同步到我们数据库.当我们发送请求后第三方会立即返回一个值,我们会根据返回值去数 ...
- KubeSphere and Friends|12 月 14 日相约北京,不见不散
如今在容器圈提到 Kubernetes,可谓是无人不知无人不晓.KubeSphere 作为一款面向云原生设计的开源项目,目的是在 Kubernetes 之上构建分布式多租户容器管理平台,提供简单易用的 ...
- day97_11_29
一.数据存储到mongodb 爬取的数据如果需要存储到mongodb中,要通过item,定义一个存储类.再yield一个类. 数据存储的时候需要进过pipelines,再到setting中配置. fr ...
- [考试反思]1110csp-s模拟测试108:消遣
是套废题.T1题面错了,T2细节多而暴力>部分分,T3题目错了. T1:打表 题面应该是输出差值期望而不是答案值期望. 看到题目,果断打表. 答案就是所有值差之和除2的k次方. #include ...
- cisco ssh实验--附带配置脚本-2019.11.19
cisco ssh实验
- 基于asp.net(C#)MVC+前端bootstrap+ztree+lodash+jquery技术-Angel工作室通用权限管理
一.Angel工作室简单通用权限系统简介 AngelRM(Asp.net MVC Web api)是基于asp.net(C#)MVC+前端bootstrap+ztree+lodash+jquery技术 ...
- C#基本语法<一>_入门经典
基本信息 CIL和JIT CIL通用中间语言 JIT just-in-time使得CIT代码仅在需要时才编译 程序集 包含可执行文件.exe和库函数.dll和资源文件,不必把程序集集中到一个地方,全局 ...
- python爬取网业信息案例
需求:爬取网站上的公司信息 代码如下: import json import os import shutil import requests import re import time reques ...