【论文阅读】Harris角点算法
#coding=utf-8
from PIL import Image
import numpy as np
from scipy.ndimage import filters
import matplotlib.pyplot as plt
import scipy.signal
def mean_filter2d(arr):
n = 3
# 3*3 滤波器, 每个系数都是 1/9
w = np.ones((n, n)) / n ** 2
# 使用滤波器卷积图像
# mode = same 表示输出尺寸等于输入尺寸
# boundary 表示采用对称边界条件处理图像边缘
s = scipy.signal.convolve2d(arr, w, mode='same', boundary='symm')
return s
def harris_response1(im,sigma=1.1):
"""计算图像的harris响应函数"""
#计算导数
imx = np.zeros(im.shape)
imx = scipy.ndimage.sobel(im,axis=0,mode='reflect')
# imx = filters.gaussian_filter(im,(sigma,sigma),(0,1),imx)
imy = np.zeros(im.shape)
imy = scipy.ndimage.sobel(im,axis=1,mode='reflect')
# imy = filters.gaussian_filter(im, (sigma, sigma), (1, 0), imy)
fig, ax = plt.subplots(1,2)
ax[0].imshow(imx, cmap='gray')
ax[1].imshow(imy, cmap='gray')
plt.show()
#计算Harris的各个分量
wxx = filters.gaussian_filter(imx*imx,sigma)
wxy = filters.gaussian_filter(imx*imy,sigma)
wyy = filters.gaussian_filter(imy*imy,sigma)
#计算像素的角点响应函数
# return (wxx*wyy - 2*wxy)/(wxx + wyy)
return wxx*wyy - wxy*wxy - 0.04*((wxx + wyy)**2)
def harris_response2(im,sigma=1.1):
"""计算图像的harris响应函数"""
#计算导数
imx = np.zeros(im.shape)
imx = scipy.ndimage.sobel(im,axis=0,mode='reflect')
# imx = filters.gaussian_filter(im,(sigma,sigma),(0,1),imx)
imy = np.zeros(im.shape)
imy = scipy.ndimage.sobel(im,axis=1,mode='reflect')
# imy = filters.gaussian_filter(im, (sigma, sigma), (1, 0), imy)
fig, ax = plt.subplots(1,2)
ax[0].imshow(imx, cmap='gray')
ax[1].imshow(imy, cmap='gray')
plt.show()
#计算Harris的各个分量
wxx = mean_filter2d(imx*imx)
wxy = mean_filter2d(imx*imy)
wyy = mean_filter2d(imy*imy)
#计算像素的角点响应函数
return wxx*wyy - wxy*wxy - 0.04*((wxx + wyy)**2)
def get_harris_points(harrism,min_dist = 10,thresold = 0.1):
"""从一幅Harrisim响应中返回角点,min_dist为分割角点和图像边界的最少像素数目"""
corner_thsold = harrism.max()*thresold
harrism_t = (harrism > corner_thsold) * 1
#得到候选点的坐标
coords = np.array(harrism_t.nonzero()).T#返回非零值的坐标的矩阵
#他们的Harris响应值
candidate_values = [harrism[c[0],c[1]] for c in coords]
#对候选点进行harris响应值进行排序
index = np.argsort(candidate_values)[::-1]#将x中的元素从小到大排列,提取其对应的index(索引),然后输出到y
#将可行点的位置保存在数组里
allowed_locations = np.zeros(harrism.shape)
allowed_locations[min_dist:-min_dist,min_dist:-min_dist] = 1
#按照min_distance原则,选择最佳harris点
filters_coords = []
for i in index:
if allowed_locations[coords[i,0],coords[i,1]] == 1:
filters_coords.append(coords[i])
allowed_locations[(coords[i,0]-min_dist):(coords[i,0]+min_dist),(coords[i,1]-min_dist):coords[i,1]+min_dist] = 0
return filters_coords
im = np.array(Image.open(r'D:\cvImageSamples\lena.png'),dtype=np.float32)
hr1 = harris_response1(im[:,:,0])
hr2 = harris_response2(im[:,:,0])
fig, ax = plt.subplots(1,3)
ax[0].imshow(im[:,:,0],cmap='gray')
ax[1].imshow(hr1, cmap='gray')
ax[2].imshow(hr2, cmap='gray')
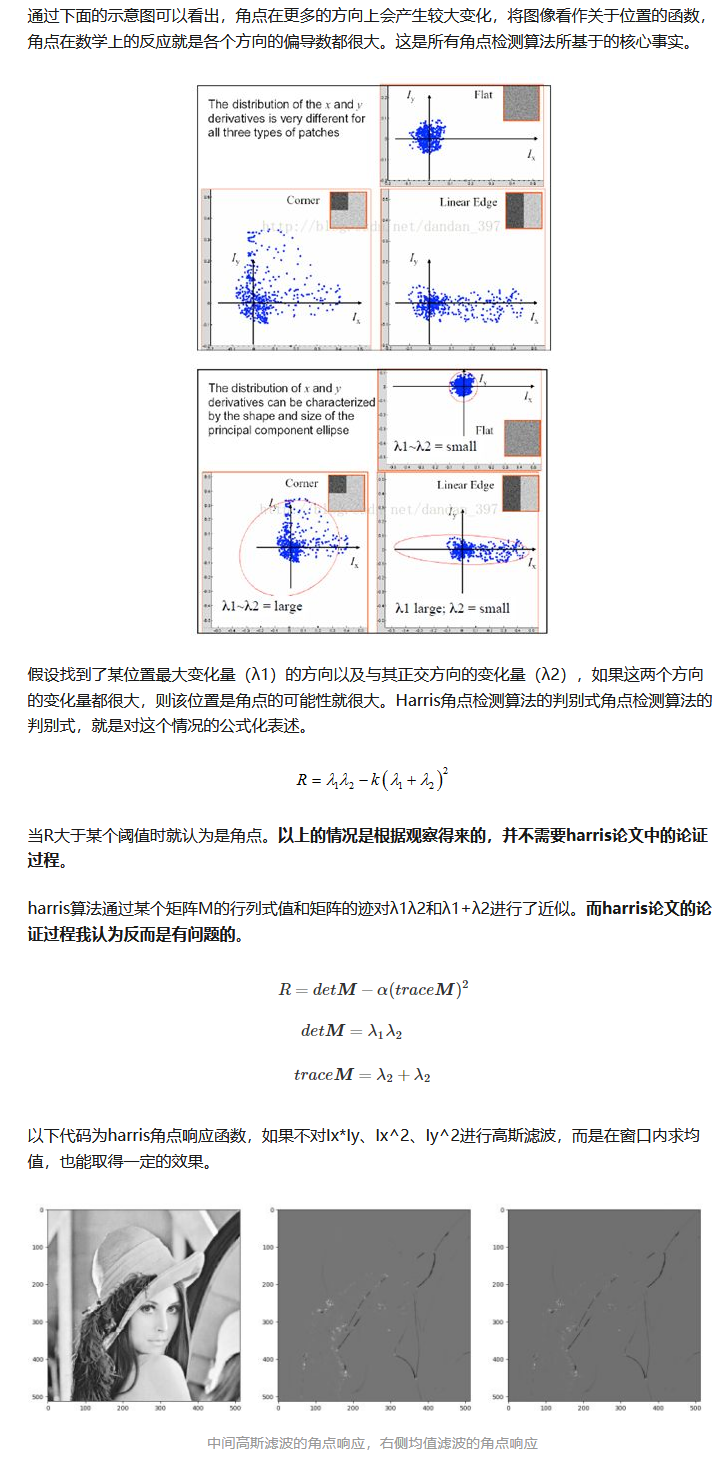
plt.show()

临时起意写的文章,没有写成md格式。只好截图了。文字版本访问https://zhuanlan.zhihu.com/p/148127081
【论文阅读】Harris角点算法的更多相关文章
- Harris角点算法
特征点检测广泛应用到目标匹配.目标跟踪.三维重建等应用中,在进行目标建模时会对图像进行目标特征的提取,常用的有颜色.角点.特征点.轮廓.纹理等特征.现在开始讲解常用的特征点检测,其中Harris角点检 ...
- 【论文阅读】分布一致性算法Paxos 《The Part-Time Parliament》
论文原文.翻译稿.PPt:https://1drv.ms/u/s!Ak-jGl23kTuMimOZzV-MyLQUYmsN?e=DL1xHD
- OpenCV计算机视觉学习(13)——图像特征点检测(Harris角点检测,sift算法)
如果需要处理的原图及代码,请移步小编的GitHub地址 传送门:请点击我 如果点击有误:https://github.com/LeBron-Jian/ComputerVisionPractice 前言 ...
- Harris角点
1. 不同类型的角点 在现实世界中,角点对应于物体的拐角,道路的十字路口.丁字路口等.从图像分析的角度来定义角点可以有以下两种定义: 角点可以是两个边缘的角点: 角点是邻域内具有两个主方向的特征点: ...
- Harris角点(转载)
1. 不同类型的角点 在现实世界中,角点对应于物体的拐角,道路的十字路口.丁字路口等.从图像分析的角度来定义角点可以有以下两种定义: 角点可以是两个边缘的角点: 角点是邻域内具有两个主方向的特征点: ...
- 论文阅读——Visual inertial odometry using coupled nonlinear optimization
简介:论文提出一种新的视觉里程计算法,其直接利用带噪声的IMU数据和视觉特征位置来优化相机位姿.不同于对IMU和视觉数据运行分离的滤波器,这种算法将它们纳入联合的非线性优化框架中.视觉特征的透视重投影 ...
- harris角点检测的简要总结
目录 1. 概述相关 2. 原理详解 1) 算法思想 2) 数学模型 3) 优化推导 3. 具体实现 1) 详细步骤 2) 最终实现 4. 参考文献 1. 概述相关 harris角点检测是一种特征提取 ...
- Harris角点检测算法优化
Harris角点检测算法优化 一.综述 用 Harris 算法进行检测,有三点不足:(1 )该算法不具有尺度不变性:(2 )该算法提取的角点是像素级的:(3 )该算法检测时间不是很令人满意. 基于以上 ...
- 特征提取算法(4)——Harris角点提取
1.角点 1.1 特征点与角点 特征点是计算机视觉算法的基础,使用特征点来代表图像的内容. 角点是一类重要的点特征,图像分析的角度来定义: 角点可以是两个边缘的角点: 角点是邻域内具有两个主方向的特征 ...
随机推荐
- asp.net MVC3.0 中@Html.Partial,@Html.Action,@Html.RenderPartial,@Html.RenderAction
asp.net MVC3.0 中@Html.Partial,@Html.Action,@Html.RenderPartial,@Html.RenderAction 1.带有Render的方法返回值是v ...
- select 下拉模糊查询
http://ivaynberg.github.io/select2/ https://github.com/ https://github.com/ivaynberg.github.io/selec ...
- PHP 操作结果集对象方法
<?php header('Content-type:text/html;charset=utf-8'); //建立 或者 关闭mysql服务器 @符号用于屏蔽错误信息 $link=@mysql ...
- Java-LinkedList围圈的人名
import java.util.*; public class Example12_7 { public static void main(String[] args) { int m=5; Lin ...
- 【转】团队项目的Git分支管理规范
原文地址: http://blog.jboost.cn/git-branch.html 分支管理 创建项目时(一般是服务型项目,工具型或辅助型项目可以简单一些),会针对不同环境创建三个常设分支: de ...
- Python面向对象的特征跟私有属性
面向对象的三大特征 继成.封装.多态: 继承:一个类可以继承一个或多个类,被继承的类叫做父类,继承的类叫做子类 封装:将数据和方法放在了一个类中就构成了封装 多态:指的一类事物有多重形态,一个抽象类 ...
- 剑指Offer之裴波那契数列
题目描述 大家都知道斐波那契数列,现在要求输入一个整数n,请你输出斐波那契数列的第n项(从0开始,第0项为0,第1项是1). n<=39 解法1:递归解法 public int Fibonacc ...
- Android_四大组件之ContentProvider
一.概述 ContentProvider(内容提供者)管理对结构化数据集的访问,它们封装数据,并提供用于定义数据安全性的机制.其他应用,通过Context的ContentResolver对象 作为客户 ...
- Java的基本数据类型及其封装类
Java的基本数据类型及其封装类 一.8种基本数据类型 二.基本数据类型的包装类及大小 三.基本数据类型和封装类的区别 定义不同.封装类是对象,基本数据类型不是: 使用方式不同.封装类需要先new初始 ...
- PriorityBlockingQueue 和 Executors.newCachedThreadPool()
1.PriorityBlockingQueue里面存储的对象必须是实现Comparable接口. 2.队列通过这个接口的compare方法确定对象的优先级priority. 规则是:当前和其他对象比较 ...