FPGA算法学习(1) -- Cordic(圆周系统之向量模式)
旋转模式用来解决三角函数,实现极坐标到直角坐标的转换,基础理论请参考Cordic算法——圆周系统之旋转模式。那么,向量模式则用来解决反三角函数的问题,体现的应用主要是直角坐标向极坐标转换,即已知一点的直角坐标(x,y),求其极坐标(α,γ),实际上是求arctan(y/x)。
旋转模式下,每次迭代使z趋近于α(α-z趋近于0),而向量模式下,则使y趋近于0,这一点很好理解,即从坐标位置,旋转到x正半轴,一共旋转了多少角度,则该角度即为α,从而知道了极角。

如图所示,在单位圆上,向量OP与X轴的正半轴夹角为α,故P点的坐标可表示为

根据开头描述,我们需要转动向量OP,先顺时针旋转θ角至向量OQ,Q点的坐标可表示为

这里定义θ为目标旋转角度。根据三角函数公式可将上式展开为

现在已经有点 Cordic 算法的样子了,但是我们看到每次旋转都要计算 4 次浮点数的乘法运算,运算量还是太大了。还需要进一步的改进,改进的切入点当然还是坐标变换的过程。
将式(1.1)代入到式(1.3)中可得

用矩阵形式表示为:

旋转了i次以后,可以得到:

最终需将y_Q_i+1转为0,先按45°的二分法查找来解释过程,用C语言描述过程为:
#include <stdio.h>
#include <stdlib.h>
double cordic_v(double x, double y);
int main(viod)
{
double alfa = cordic_v(120.0,200.0); //直角坐标(x,y)
printf("\n 极角为 = %f \n",alfa);
return 0;
}
double cordic_v(double x, double y)
{
const double sine[] = {0.7071067811865,0.3826834323651,0.1950903220161,
0.09801714032956,0.04906767432742,0.02454122852291,0.01227153828572,
0.006135884649154,0.003067956762966,0.001533980186285,
7.669903187427045e-4,3.834951875713956e-4,1.917475973107033e-4,
9.587379909597735e-5,4.793689960306688e-5,2.396844980841822e-5
};
const double cosine[] = {0.7071067811865,0.9238795325113,0.9807852804032,0.9951847266722,
0.9987954562052,0.9996988186962,0.9999247018391,0.9999811752826,0.9999952938096,
0.9999988234517,0.9999997058629,0.9999999264657,0.9999999816164,0.9999999954041,
0.999999998851,0.9999999997128
};
int i = 0;
double x_new, y_new;
double angleSum = 0.0;
double angle = 45.0; //第一次旋转角度为45°
for( i=0; i<15;i++)
{
if(y > 0)
{
x_new = x * cosine[i] + y * sine[i];
y_new = y * cosine[i] - x * sine[i];
x = x_new;
y = y_new;
angleSum += angle;
}
else
{
x_new = x * cosine[i] - y * sine[i];
y_new = y * cosine[i] + x * sine[i];
x = x_new;
y = y_new;
angleSum -= angle;
}
printf("旋转次数: i = %2d 旋转角度 = %10f, 累计旋转角度 = %10f\n", i+1, angle,angleSum );
angle /= 2;
}
return angleSum;
}

经过旋转模式的推导,向量模式的伪旋转公式,可表示为
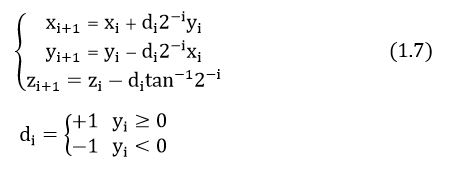
C语言描述过程,如下:
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
double cordic_v(double x, double y);
double r = 0.0; //定义一个模长全局变量
int main(viod)
{
double alfa = cordic_v(120.0,200.0); //直角坐标(x,y)
printf("\n极角 = %5f, 模长 = %5f\n",alfa,r);
return 0;
}
double cordic_v(double x, double y)
{
const double theta[] = { 45.0, 26.56505118, 14.03624347, 7.125016349,
3.576334375, 1.789910608, 0.8951737102, 0.4476141709,
0.2238105004, 0.1119056771, 0.05595289189, 0.02797645262,
0.01398822714, 0.006994113675, 0.003497056851, 0.001748528427
}; //旋转角度
int i = 0;
double x_new, y_new;
double angleSum = 0.0;
r = sqrt(x*x+y*y);
for( i=0; i<16;i++)
{
if(y > 0)
{
x_new = x + y/(1<<i);
y_new = y - x/(1<<i);
x = x_new;
y = y_new;
angleSum += theta[i];
}
else
{
x_new = x - y/(1<<i);
y_new = y + x/(1<<i);
x = x_new;
y = y_new;
angleSum -= theta[i];
}
printf("旋转次数: i = %2d 旋转角度 = %10f, 累计旋转角度 = %10f, y = %5f\n", i+1,theta[i],angleSum,y );
}
return angleSum;
}

同样,向量模式的cordic算法适用于第一、四象限的坐标变换,在第二、三象限的坐标需要进行预处理。
参考
《基于FPGA的数字信号处理(第2版)》——高亚军著
FPGA算法学习(1) -- Cordic(圆周系统之向量模式)的更多相关文章
- FPGA算法学习(1) -- Cordic(Verilog实现)
上两篇博文Cordic算法--圆周系统之旋转模式.Cordic算法--圆周系统之向量模式做了理论分析和实现,但是所用到的变量依然是浮点型,而cordic真正的用处是基于FPGA等只能处理定点的平台.只 ...
- FPGA算法学习(1) -- Cordic(圆周系统之旋转模式)
三角函数的计算是个复杂的主题,有计算机之前,人们通常通过查找三角函数表来计算任意角度的三角函数的值.这种表格在人们刚刚产生三角函数的概念的时候就已经有了,它们通常是通过从已知值(比如sin(π/2)= ...
- Cordic算法——圆周系统之向量模式
旋转模式用来解决三角函数,实现极坐标到直角坐标的转换,基础理论请参考Cordic算法--圆周系统之旋转模式.那么,向量模式则用来解决反三角函数的问题,体现的应用主要是直角坐标向极坐标转换,即已知一点的 ...
- Cordic算法——圆周系统之旋转模式
三角函数的计算是个复杂的主题,有计算机之前,人们通常通过查找三角函数表来计算任意角度的三角函数的值.这种表格在人们刚刚产生三角函数的概念的时候就已经有了,它们通常是通过从已知值(比如sin(π/2)= ...
- python学习之算法、自定义模块、系统标准模块(上)
算法.自定义模块.系统标准模块(time .datetime .random .OS .sys .hashlib .json和pickle) 一:算法回顾: 冒泡算法,也叫冒泡排序,其特点如下: 1. ...
- Python之路,Day21 - 常用算法学习
Python之路,Day21 - 常用算法学习 本节内容 算法定义 时间复杂度 空间复杂度 常用算法实例 1.算法定义 算法(Algorithm)是指解题方案的准确而完整的描述,是一系列解决问题的 ...
- 《如何学习基于ARM嵌入式系统》笔记整理
author:Peong time:20190603 如何学习基于ARM嵌入式系统 一.嵌入式系统的概念 从硬件上讲,将外围器件,与CPU集成在一起. 从操作系统上讲,定制符合要求的系统内核 从应用上 ...
- paxos算法学习总结
核心思想 分布式系统架构下如何让整体尽快达成一致观点,也就是多个不同观点收敛到一个观点的过程. 难点 可能会发生少数节点故障,但绝不是大面积故障,不然系统也没法正常工作. 由于存在单点故障,因此不可能 ...
- 某科学的PID算法学习笔记
最近,在某社团的要求下,自学了PID算法.学完后,深切地感受到PID算法之强大.PID算法应用广泛,比如加热器.平衡车.无人机等等,是自动控制理论中比较容易理解但十分重要的算法. 下面是博主学习过程中 ...
随机推荐
- MySQL中AddDate函数的疑惑
无论使用哪一种RDBMS,都需要使用到其中的一些日期转换函数,在使用MySQL的AddDate函数时,遇到了点小问题,稍作记录. root@localhost:mysql3376.sock [(non ...
- SQLite的.NET应用自适应32位/64位系统 z
如果一个.NET应用要自适应32位/64位系统,只需要在项目的“目标平台”设置为“Any CPU”.但是如果应用中使用了SQLite,情况就不同了. SQLite的.NET开发包来自是System.D ...
- Selenium2学习(三)-- 八种元素元素定位(Firebug和firepath)
前言 自动化只要掌握四步操作:获取元素,操作元素,获取返回结果,断言(返回结果与期望结果是否一致),最后自动出测试报告.本篇主要讲如何用firefox辅助工具进行元素定位.元素定位在这四个环节中是至关 ...
- ORACLE_SPOOL
Question:When you use developer tool in oracle.However,you press Ctrl and click left-mouse in a tabl ...
- SQA计划与测试规程
长大一条龙之SQA计划与测试规程 一.SQA计划 1.软件工程 我们之进行开发之前,在弄完需求分析的前提下,进行了软件一些列的建模和评估,我们建立了基于类的模型图类图,基于场景的模型图流程图,再对这些 ...
- 如何将一个PDF文件里的图片批量导出
假设我有下面这个PDF文件,里面有很多图片,我想把这些图片批量导出,而不是在Adobe Acrobat Reader里一张张手动拷贝: 本文介绍一种快捷做法. 用PDF-XChange Editor打 ...
- MySQL学习(三)函数
一.数学函数 绝对值函数ABS():ABS(X) 返回圆周率函数PI() 平方根函数SQRT() 求余函数MOD(X,Y) 获取整数函数CEIL(X),CEILING(X)返回不小于X的最小整数:FL ...
- Sublime Text 插件 【转】
好厉害,好漂亮. http://www.cnsecer.com/460.html 安装Sublime Text 3插件的方法: 朋友们,小站活着不容易,全靠广告费养着了,如果本文对你有帮助.麻烦动下手 ...
- 2018.11.30 zsh: command not found: mysql 的解决办法mac环境下
系统环境变量的问题.解决办法: 1.打开终端.输入open .zshrc 会出现一个可编辑文档, 2.找到# User configuration部分,在下一行添加source ~/.bash_pro ...
- Android学习笔记_21_ViewFlipper使用详解 手势识别器
一.介绍ViewFilpper类 1.1 屏幕切换 屏幕切换指的是在同一个Activity内屏幕见的切换,最长见的情况就是在一个FrameLayout内有多个页面,比如一个系统设置页面:一个个性化设置 ...