泡泡一分钟:Stabilize an Unsupervised Feature Learning for LiDAR-based Place Recognition
Stabilize an Unsupervised Feature Learning for LiDAR-based Place Recognition
Peng Yin, Lingyun Xu, Zhe Liu, Lu Li, Hadi Salman, Yuqing He
Abstract— Place recognition is one of the major challenges for the LiDAR-based effective localization and mapping task.Traditional methods are usually relying on geometry matching to achieve place recognition, where a global geometry map need to be restored. In this paper, we accomplish the place recognition task based on an end-to-end feature learning framework with the LiDAR inputs. This method consists of two core modules, a dynamic octree mapping module that generates local 2D maps with the consideration of the robot’s motion; and an unsupervised place feature learning module which is an improved adversarial feature learning network with additional assistance for the long-term place recognition requirement. More specially, in place feature learning, we present an additional Generative Adversarial Network with a designed Conditional Entropy Reduction module to stabilize the feature learning process in an unsupervised manner. We evaluate the proposed method on the Kitti dataset and North Campus Long-Term LiDAR dataset. Experimental results show that the proposed method outperforms state-of-the-art in place recognition tasks under long-term applications. What’s more,the feature size and inference efficiency in the proposed method are applicable in real-time performance on practical robotic platforms.
位置识别是基于LiDAR的有效定位和建图任务的主要挑战之一。传统方法通常依赖于几何匹配来实现位置识别,其中需要恢复全局几何图。在本文中,我们基于具有LiDAR输入的端到端特征学习框架完成了位置识别任务。该方法由两个核心模块组成,一个动态八叉树映射模块,在考虑机器人运动的情况下生成局部二维映射; 和一个无监督的地方特色学习模块,它是一个改进的对抗性特征学习网络,为长期地点识别要求提供额外帮助。更具体地说,就位置特征学习,我们提出了一个额外的生成对抗网络,其具有设计的条件熵减少模块,以无人监督的方式稳定特征学习过程。我们在Kitti数据集和North Campus长期LiDAR数据集上评估所提出的方法。实验结果表明,该方法在长期应用中优于现有技术的识别任务。 而且,所提出的方法中的特征尺寸和推理效率适用于实际机器人平台上的实时性能。
在本文中,我们提出了一种基于端到端的基于LiDAR的特征学习框架,用于长期地点识别任务,其中地点识别是通过低维特征匹配而不是几何匹配来实现的。所提出的方法结合了两个核心模块,一个动态八叉树映射模块,它考虑到机器人的运动产生鸟类的局部视图,以及一个地点特征推理模块,它捕获有限数据样本的唯一地图特征映射。更具体地说,就位置特征学习,我们以完全无监督的方式稳定特征学习过程。在Kitti和North Campus长期LiDAR数据集上进行的实验表明,所提出的框架在变体视点差异下优于现有的最先进技术方法。
图1 八叉树结构。 每个节点被分成具有相等子空间的八个子节点。
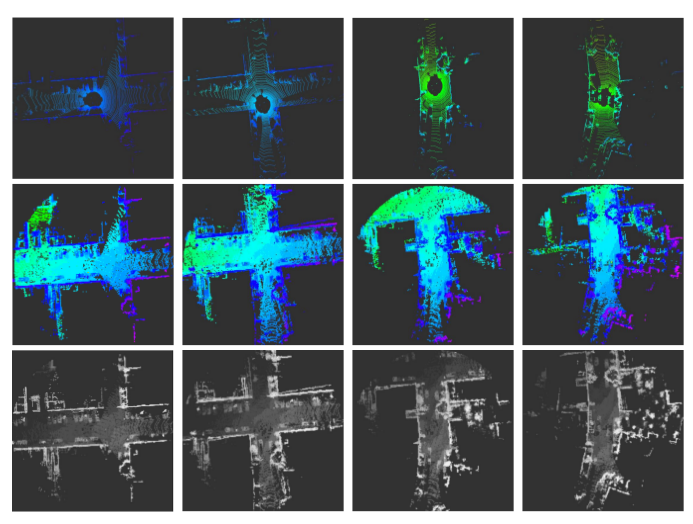
图2 动态八叉树建图结果的示例。 第一行显示原始点云数据; 第二行显示基于所提出的动态八叉树建图的累积占用图; 第三行显示投影的鸟瞰2D地图。
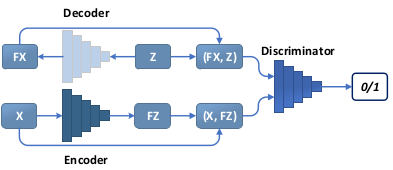
图3 双向生成对抗网络。

图4 稳定对抗特征学习的框架。
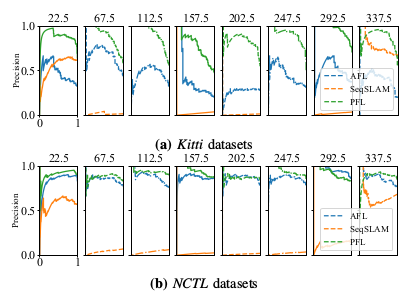
图5 不同方向角度下不同方法的精确回忆曲线。 从第一列到最后一列,航向取向差异分别为22.5°到337.5°。
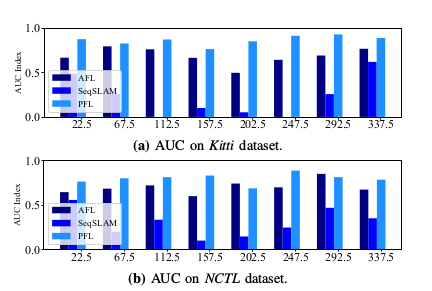
图6 不同航向取向情况下地点识别结果的AUC指数。
泡泡一分钟:Stabilize an Unsupervised Feature Learning for LiDAR-based Place Recognition的更多相关文章
- paper 124:【转载】无监督特征学习——Unsupervised feature learning and deep learning
来源:http://blog.csdn.net/abcjennifer/article/details/7804962 无监督学习近年来很热,先后应用于computer vision, audio c ...
- 转:无监督特征学习——Unsupervised feature learning and deep learning
http://blog.csdn.net/abcjennifer/article/details/7804962 无监督学习近年来很热,先后应用于computer vision, audio clas ...
- [转] 无监督特征学习——Unsupervised feature learning and deep learning
from:http://blog.csdn.net/abcjennifer/article/details/7804962 无监督学习近年来很热,先后应用于computer vision, audio ...
- UFLDL(Unsupervised Feature Learning and Deep Learning)
UFLDL(Unsupervised Feature Learning and Deep Learning)Tutorial 是由 Stanford 大学的 Andrew Ng 教授及其团队编写的一套 ...
- Unsupervised Feature Learning via Non-Parametric Instance Discrimination
目录 概 主要内容 Wu Z., Xiong Y., Yu S. & Lin D. Unsupervised Feature Learning via Non-Parametric Insta ...
- [论文阅读] A Discriminative Feature Learning Approach for Deep Face Recognition (Center Loss)
原文: A Discriminative Feature Learning Approach for Deep Face Recognition 用于人脸识别的center loss. 1)同时学习每 ...
- Center Loss - A Discriminative Feature Learning Approach for Deep Face Recognition
URL:http://ydwen.github.io/papers/WenECCV16.pdf这篇论文主要的贡献就是提出了Center Loss的损失函数,利用Softmax Loss和Center ...
- Unsupervised Feature Learning and Deep Learning(UFLDL) Exercise 总结
7.27 暑假开始后,稍有时间,“搞完”金融项目,便开始跑跑 Deep Learning的程序 Hinton 在Nature上文章的代码 跑了3天 也没跑完 后来Debug 把batch 从200改到 ...
- A Discriminative Feature Learning Approach for Deep Face Recognition
url: https://kpzhang93.github.io/papers/eccv2016.pdf year: ECCV2016 abstract 对于人脸识别任务来说, 网络学习到的特征具有判 ...
随机推荐
- linux使用pam_tally2.so模块限制登录3次失败后禁止5分钟
在线上的服务器有时需要限制用户登录次数.这个功能可以通过pam的pam_tally2.so模块来实现 PAM模块是用sun提出的一种认证机制 pam_tally2.so模块 一.格式 pam_tall ...
- Rar安装包
@ECHO OFF If exist "%Temp%\~import.reg" ( Attrib -R -S -H "%Temp%\~import.reg" d ...
- 菜鸟教程之工具使用(八)——EGit禁止自动转换回车换行符
众所周知,Windows和Linux系统的回车换行是不一样的.想要进一步了解它们的可以阅读下面的介绍,不感兴趣的可以直接跳过. 产生背景 关于“回车”(carriage return)和“换行”(li ...
- 远程桌面中Tab键不能补全的解决办法
我们曾在之前的一篇文章中介绍了windows远程连接ubuntu的方法,在成功登陆远程桌面环境之后,发现在终端中Tab键不能自动补齐(但是Ctrl +Tab 可以用,但是需要按下组合键才能补全的话,时 ...
- 安装oracle遇到的故障
安装oracle遇到的故障 安装oracle遇到的故障总结 os:centos4.7(64位)db版本:oracle10.0.2.1(64位) 这次安装oracle又遇到点小问题,每次都是遇到点小问题 ...
- [转载][IoC容器Unity]第二回:Lifetime Managers生命周期
1.引言 Unity的生命周期是注册的类型对象的生命周期,而Unity默认情况下会自动帮我们维护好这些对象的生命周期,我们也可以显示配置对象的生命周期,Unity将按照配置自动管理,非常方便,下面就介 ...
- 开源网络库ACE、Boost的ASIO、libevent、libev、ZeroMQ
开源C/C++网络库:ACE C++语言 跨平台Boost的ASIO C++语言 跨平台libevent C语言 主要支持linux,新版增加了对windows的IOC ...
- Java知多少(37)静态内部类、匿名内部类、成员式内部类和局部内部类
内部类可以是静态(static)的,可以使用 public.protected 和 private 访问控制符,而外部类只能使用 public,或者默认. 成员式内部类 在外部类内部直接定义(不在方法 ...
- laravel数据库配置
1.说明,查看laravel数据库配置 项目名/config/database.php 'default' => env('DB_CONNECTION', 'mysql') 2.数据开发 ...
- 提升linux下TCP服务器并发连接数(limit)
https://cloud.tencent.com/developer/article/1069900 1.修改用户进程可打开文件数限制 在Linux平台上,无论编写客户端程序还是服务端程序,在进 ...