linux之I2C裸机驱动解析(转)
1 硬件特性
1.1 概述
I2C总线是由Philips公司开发的两线式串行总线,这两根线为时钟线(SCL)和双向数据线(SDA)。由于I2C总线仅需要两根线,因此在电路板上占用的空间更少,带来的问题是带宽较窄。I2C在标准模式下传输速率最高100Kb/s,在快速模式下最高可达400kb/s。属于半双工。
在嵌入式系统中,I2C应用非常广泛,大多数微控制器中集成了I2C总线,一般用于和RTC,EEPROM,智能电池电路,传感器,LCD以及其他类似设备之间的通信。
1.2 I2C总线传输时序

1.3 I2C总线的信号状态
1、 空闲状态:SDA和SCL都是高电平;
2、 开始条件(S):SCL为高电平时,SDA由高电平向低电平跳变,开始传输数据;
3、 结束条件(P):SCL为高电平时,SDA由低电平向高电平跳变,结束传输数据;
4、 数据有效:在SCL的高电平期间,SDA保持稳定,数据有效。SDA的改变只能发生在SCL的低电平期间;
5、 ACK信号:数据传输的过程中,接收器件每接收一个字节数据要产生一个ACK信号,向发送器件发出特定的低电平脉冲,表示已经收到数据。
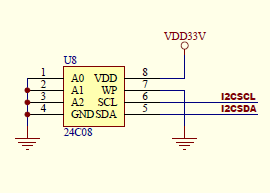
1.4 从设备地址
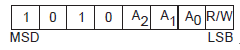
I2C总线从设备使用7位地址,最后一个为读写控制位。下图是eeprom的原理图,我们可以计算出它的地址为0x50。
1.5 I2C读写方式
多字节写的时序

多字节读的时序
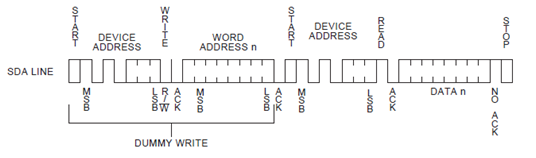
具体可参考datasheet
附:ok6410裸机I2C代码。
#define INTPND (*(volatile unsigned long*)0x4a000010)
#define SRCPND (*(volatile unsigned long*)0x4a000000)
#define INTMSK (*(volatile unsigned long*)0x4a000008)
#define GPECON (*(volatile unsigned long*)0x56000040)
#define GPEUP (*(volatile unsigned long*)0x56000048) #define IICCON (*(volatile unsigned char*)0x54000000)
#define IICSTAT (*(volatile unsigned char*)0x54000004)
#define IICDS (*(volatile unsigned char*)0x5400000C) #define SLAVE_WRITE_ADD 0xa0 /* 写入数据时;方向位(第0位)为0 */
#define SLAVE_READ_ADD 0xa1 /* 读取数据时;方向位(第0位)为1 */ void delay(int i)
{
int j = ;
while (i--)
{
for (j=;j<;j++)
{
;
}
}
} void i2c_init()
{
//1.a 初始化中断
INTPND |= (<<);
SRCPND |= (<<);
INTMSK &= ~(<<); IICCON |= (<<); //1.b 设置scl时钟
IICCON &= ~(<<);
IICCON &= ~(0xf<<);
IICCON |= (0x5<<); //2. 设置IICSTAT
IICCON |= (<<); //3.设置引脚功能
GPECON |= (0x2<<)|(0x2<<);
GPEUP |= (0x3<<); //4.允许产生ACK
IICCON |= (<<);
} void write_byte(unsigned char xchar, unsigned char daddr)
{
/* 写入数据时,每发送一个数据收到一个ACK就产生一次中断
* 写入下次发送的数据之后要清除中断 */ //1. 设置处理器为主设备+发送模式
IICSTAT |= (<<); //2. 将从设备的地址写入到IICDS寄存器
IICDS = SLAVE_WRITE_ADD; //清除中断
IICCON &= ~(<<); //3. 写入0xF0写入IICSTAT M/T Start
IICSTAT = 0xF0; //4. 等待ACK的产生
while ((IICCON & (<<)) == )
delay(); //5.1写入字节的地址到IICDS寄存器
IICDS = daddr; //5.2清除中断
IICCON &= ~(<<); //5.3等待ACK的产生
while ((IICCON & (<<)) == )
delay(); //6. 将要传输的字节数据写入IICDS寄存器
IICDS = xchar; //7. 清除中断
IICCON &= ~(<<); //8. 等待ACk的产生
while ((IICCON & (<<)) == )
delay(); //9. 写入0xD0到IICSTAT
IICSTAT = 0xD0; //10. 清除中断
IICCON &= ~(<<); delay();
} void read_data(unsigned char *buf, unsigned char daddr, int length) /* 结合eeprom手册 */
{
/* 每接收一个数据产生一个中断 */ int j =;
unsigned char unusedata; //1. 设置处理器为主设备+发送模式
IICSTAT |= (<<); //2. 将从设备的地址写入到IICDS寄存器
IICDS = SLAVE_WRITE_ADD; //清除中断
IICCON &= ~(<<); //3. 写入0xF0写入IICSTAT M/T-Start
IICSTAT = 0xF0; //4. 等待ACK的产生
while ((IICCON & (<<)) == )
delay(); //5.1写入eeprom内部地址
IICDS = daddr; //5.2清除中断
IICCON &= ~(<<); //5.3等待ACK的产生
while ((IICCON & (<<)) == )
delay(); /**************eeprom代码**************/
/**************************************/
/***************i2c代码****************/ //设置为主设备接收模式
IICSTAT &= ~(<<);
IICSTAT |= (<<); //2.写入从设备地址到IICDS /* 从设备地址成功发送之后产生中断,故要清除中断 */
IICDS = SLAVE_READ_ADD;
//清除中断
IICCON &= ~(<<); //3.写入0xB0到IICSTAT开始接收,每接收道一个数据就产生一个中断
IICSTAT = 0xb0; //等待中断
while ((IICCON & (<<)) == )
delay(); #if 0
/***写入设备内部地址***/
IICDS = daddr;
IICCON &= ~( << );
while((IICCON & ( << )) == )
{
delay();
}
#endif //***丢掉收到的第1个字节 第一个数据无效 丢弃!
unusedata = IICDS;
IICCON &= ~(<<);
while ((IICCON & (<<)) == )
delay(); for(j=;j<length;j++)
{
if(j == (length - ))
{
IICCON &= ~(<<);
} //5.1 从IICDS里取出数据
buf[j]=IICDS; //5.2 清除中断
IICCON &= ~(<<); //4.等待中断
while ((IICCON & (<<)) == )
delay();
} //写入0x90到IICSTAT
IICSTAT = 0x90; // 清除中断
IICCON &= ~(<<);
} void i2c_test()
{
int i=;
unsigned char sbuf[]={};
unsigned char dbuf[]={}; i2c_init(); for(i=;i<;i++)
{
sbuf[i] = i+;
dbuf[i] = ;
} printf("dbuf befor I2C read:\r\n");
for(i =; i<;i++)
{
if(i%==)
printf("\r\n"); /* */ printf("%d\t",dbuf[i]); /*t-空格 */
} for(i=;i<;i++)
write_byte(sbuf[i],i); printf("i2c reading, plese wait!\n\r"); read_data(dbuf,,); printf("dbuf after I2C read:\r\n"); for(i =; i<;i++)
{
if(i%==)
printf("\r\n"); printf("%d\t",dbuf[i]);
}
}
linux之I2C裸机驱动解析(转)的更多相关文章
- linux下i2c的驱动架构分析和应用
i2c在linux下的代码在/driver/i2c下面,总体代码如下所示: i2c-core.c 这个文件实现了I2C核心的功能以及/proc/bus/i2c*接口. i2c-dev.c 实现 ...
- Linux kernel 之 uart 驱动解析
uart 是一种非常之常见的总线,比如DEBUG信息输出,小数据量数据传输,485,以及蓝牙的控制,GPS,很多都是通过uart 进行数据传输并进行控制. 在Linux kernel 内部,uart ...
- I2C裸机驱动程序设计
① I2C(Inter-Integrated Circuit)总线是由飞利浦公司开发的两线式串行总线,用于连接微控制器及其外围设备 ② I2C总线有两根双向信号线 (1)SDA:Serial Data ...
- [国嵌攻略][153][I2C裸机驱动设计]
eeprom简介 eeprom电可擦除可编程只读存储器,是一种类似于flash的固态存储器,但是与flash相比又存在一些区别: 1.eeprom可以按位擦写,而flash只能大片擦除. 2.eepr ...
- Linux I2C设备驱动编写(一)
在Linux驱动中I2C系统中主要包含以下几个成员: I2C adapter 即I2C适配器 I2C driver 某个I2C设备的设备驱动,可以以driver理解. I2C client 某个I2C ...
- 【转】Linux I2C设备驱动编写(一)
原文网址:http://www.cnblogs.com/biglucky/p/4059576.html 在Linux驱动中I2C系统中主要包含以下几个成员: I2C adapter 即I2C适配器 I ...
- 【驱动】linux下I2C驱动架构全面分析
I2C 概述 I2C是philips提出的外设总线. I2C只有两条线,一条串行数据线:SDA,一条是时钟线SCL ,使用SCL,SDA这两根信号线就实现了设备之间的数据交互,它方便了工程师的布线. ...
- TQ2440学习笔记——Linux上I2C驱动的两种实现方法(1)
作者:彭东林 邮箱:pengdonglin137@163.com 内核版本:Linux-3.14 u-boot版本:U-Boot 2015.04 硬件:TQ2440 (NorFlash:2M Na ...
- linux下I2C驱动架构全面分析【转】
本文转载自:http://blog.csdn.net/wangpengqi/article/details/17711165 I2C 概述 I2C是philips提出的外设总线. I2C只有两条线,一 ...
随机推荐
- 在 Visual Studio 2013 中使用 Grunt, Bower 和 NPM
在 Visual Studio 2015 中提供了对于 Grunt 和 Gulp 的内置支持,在 Visual Studio 2013 中怎么办呢?微软将 2015 中的特性作为几个独立的扩展发布出来 ...
- TesCase-GUI(图形用户界面)测试
GUI测试是功能测试的一种表现形式.不仅要考虑GUI本身的测试,也要考虑GUI所表现的系统功能的测试. GUI应具有的要素 1.符合标准和规范 2.直观性 (1)用户界面是否洁净.不唐突.不拥挤? ...
- Linux下程序对拍_C++
此博客需要付费才阅读,因为该博客实用性十分强,且十分容易理解 若需购买请联系博主,联系方式戳这 http://www.cnblogs.com/hadilo/p/5932395.html 主要介绍如何在 ...
- 【考试】简单的sql语句
)显示正好为5个字符的员工的姓名 HR@ORA11GR2>select last_name,first_name from employees ; )显示不带有"R"的员工的 ...
- python函数基础以及函数参数简解
python中函数分为函数.内置函数Python所有的内置函数 自定义函数要使用def语句,依次写出函数名.括号.括号中的参数和冒号:,然后,在缩进块中编写函数体,函数的返回值用return语句返回. ...
- A new start!
从今天起,开始每天晚上拿出来半个小时到一个小时的时间来总结今天我做的那些事情,有哪些进步,有哪些不足,有哪些心得和笔记. 以前的学习都是每天学完就往脑袋后面一放,导致很多东西当时学会了,但是后面就都想 ...
- WWF3动态修改工作流<第九篇>
一.动态添加或移除工作流活动 首先添加一个顺序的空白工作流. 然后添加一个Winform程序,界面如下: 代码如下: namespace WinForm { public partial class ...
- session StateServer 方式 初始化StateServer服务器
1.初始化StateServer服务器启动ASP.NET 状态服务[aspnet_state],该服务默认是手动启动的,可以通过修改注册表,设置为自动启动并允许远程连接.修改方法如下:修改注册表: [ ...
- 备份/恢复SQLSERVER数据库,SQL一步实现
--备份SQL SERVER数据库 BACKUP DATABASE book09 TO DISK ='c:\abc.bak' WITH init --恢复SQL SERVER数据库USE MAST ...
- 十、Struts2结果集
十.Struts2结果集 1.Struts.xml配置文件 result元素:指定动作类的动作方法执行完后的结果视图. 属性: name:字符串,与 ...