论文阅读之:Is Faster R-CNN Doing Well for Pedestrian Detection?
Is Faster R-CNN Doing Well for Pedestrian Detection?
ECCV 2016 Liliang Zhang & Kaiming He
原文链接:http://arxiv.org/pdf/1607.07032v2.pdf
Code : https://github.com/zhangliliang/RPN_BF/tree/RPN-pedestrian
摘要:行人检测被人 argue 说是特定课题,而不是general 的物体检测。虽然最近的深度物体检测方法 如: Fast/Faster RCNN 在general 的物体检测中,展现了强大的性能,但是对于行人检测却不太成功。本文研究了 Faster RCNN 在行人检测中存在的问题,发现 RPN 在单独的行人检测器中表现良好,但是随后的分类器却降低了该结果。我们猜想可能是如下两个原因导致的:
1. 对于处理小物体,feature maps 的分辨率较低;
2. 缺乏任何 bootstrapping strategy 来挖掘 hard negative examples。
基于这些观察,我们提出了一个简单但是非常有效的 baseline,利用 RPN后 通过 boosted forests 在共享的,高分辨率的卷积特征映射(using an RPN followed by boosted forests on shared, high-resolution convolutional feature maps)。在4个数据机上做了实验,得到了相当的精度和较好的速度。

动机:随着近来自动驾驶,智能监控中对于行人检测越来越重视,但当前效果较好的行人 detectors 一般采用 hybrid 方法,结合传统手工设计的feature 和 深度卷积feature。另一方面,Faster RCNN 在 general 的物体检测上效果很好,而且仅仅利用了深度卷积特征,而没有传统手工设计的 feature,而且在行人检测数据集上效果不好!
究其原因,可能有两点:
首先,卷积feature maps 对于检测小物体来说是低分辨率的。常规场景下的行人检测,如自动驾驶和智能监控,行人的尺寸都是很小的。对于小物体而言,RoI pooling layer 在低分辨率的 feature map 上可能导致 “plain”features 。这些 feature 在小物体上不具有区分性,所以降低了分类器的性能。我们对比此处,可以发现,手工设计的feature 有较好的分辨率。我们通过从更浅层的但是分辨率高的层上来进行 feature 的采样,利用 the hole algorithm 来增加 feature map 的尺寸。
其次,在行人检测问题上,错误的预测,一般都是由于 hard background instances 的混淆导致的。与此对应的是 general object detection 的混淆来源是 multiple categories。为了解决这些样本导致的问题,采用了级联的 Boosted Forest (BF),执行有效的 hard negative mining(bootstrapping)和 样本的 re-weight,来分类 RPN proposals。不像之前的方法利用手工设计的features 来训练 forest,我们重新利用 RPN 的卷积特征来训练。这种策略不但通过共享feature 降低了分类器的计算代价,也探索了深度学习到的features。
本文在此观察的基础上,提出了特别简单但是有效的baseline,基于 RPN and BF 的机制进行行人检测。我们的方法克服了上述两种困难,而且摆脱了传统手工设计 feature。
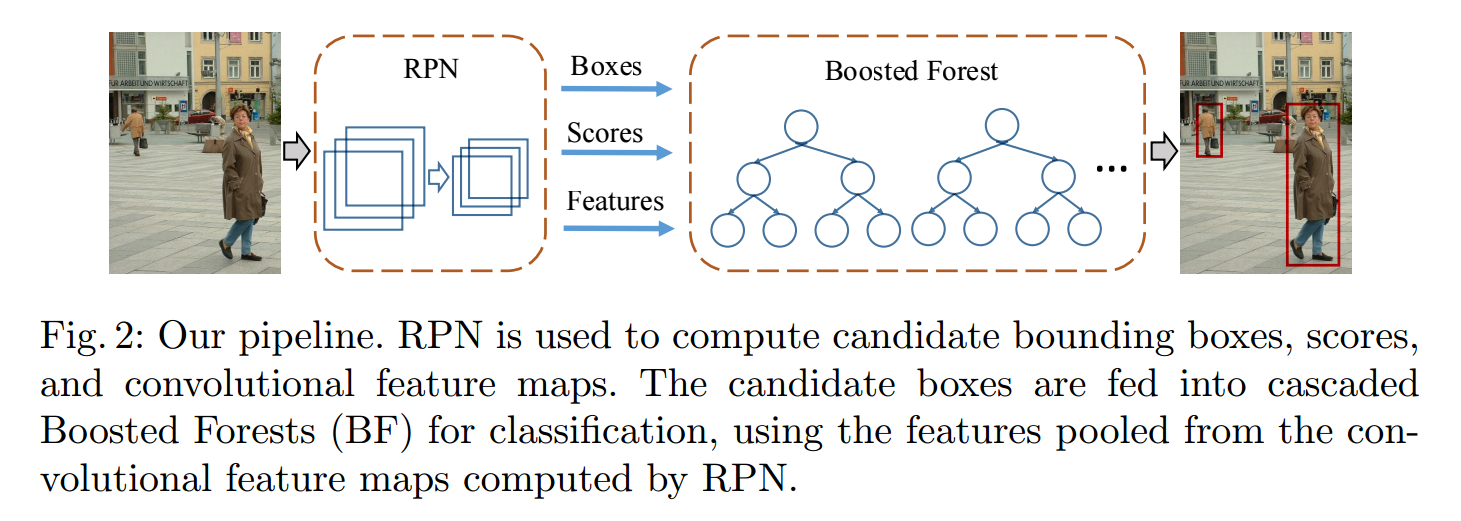
所提出的方法:本文的方法包括两个部分:RPN 用来产生 candidate boxes 和 卷积特征maps,以及 Boosted Forest 利用这些卷积特征进行分类。
1. RPN for Pedestrian Detection
这个和 Faster RCNN 貌似是一样的,咱不解释;
2. Feature Extraction:
根据 RPN 产生的 proposals,我们采用 RoI pooling 来区域中提取固定长度的 feature。这些 feature 可以用来训练 BF。不像 Faster RCNN 需要将这些 features 送到 originally fully-connected (fc)layers,所以就限制了其维度,BF 分类器 对于特征的维度没有限制。
令人印象深刻的是,由于没有特征维度的限制,对于我们来说,就可以利用这些来增强分辨率。具体的是,给定微调后的 RPN 的 layer,我们可以用一种 trick 来计算高分辨率的卷积特征映射。例如,我们设置 pool3 的 stride 为 1,将 Conv4 filter dilate 2,使得 Conv4 的步长从 8 变成了 4. 不像之前的方法,微调 dilated filters,在我们的方法中,我们仅仅用来特征提取,而不会再去微调新的 RPN。
虽然采用了和 Faster RCNN 类似的 RoI resolution,这些 RoIs 实在更高的分辨率上进行的。如果 RoI 的输入分辨率 比 输出小,那么 the pooling bins collapse and the feature become "flat" and not discriminative. 这个问题在我们的方法中被消除,因为在我们的 downstream classifier 用 Conv5_3 是不受约束的。
3. Boosted Forest :
根据 RPN 产生的 region proposals,confidence scores,以及 features,所有的这些都用来产生级联的 Boosted Forest classifier。我们采用 RealBoost algorithm, we bootstrap the training by 6 times, and the forest in each stage has {64, 128, 256, 512, 1024, 1536} trees。初始的时刻,训练集合包含所有的正样本,以及同样个数的随机采样出来的负样本。在每一个阶段,额外的 hard negative examples 被挖掘出来,并且添加到 training set 中。最终,在所有的 bootstrapping stages 完毕之后训练一个 2048 trees 的森林。最终的 forest classifier 用来做 inference。
注意到,其实没有必要同等的处理初始的 proposals,因为我们的 proposals 在 RPN 之后得到了初始的 score。换句话说, the RPN 可以被当作是 stage-0 的分类器 f0。
这里只是粗略的讲解了后续分类的流程,具体细节还要参考原始文章。
实验结果:
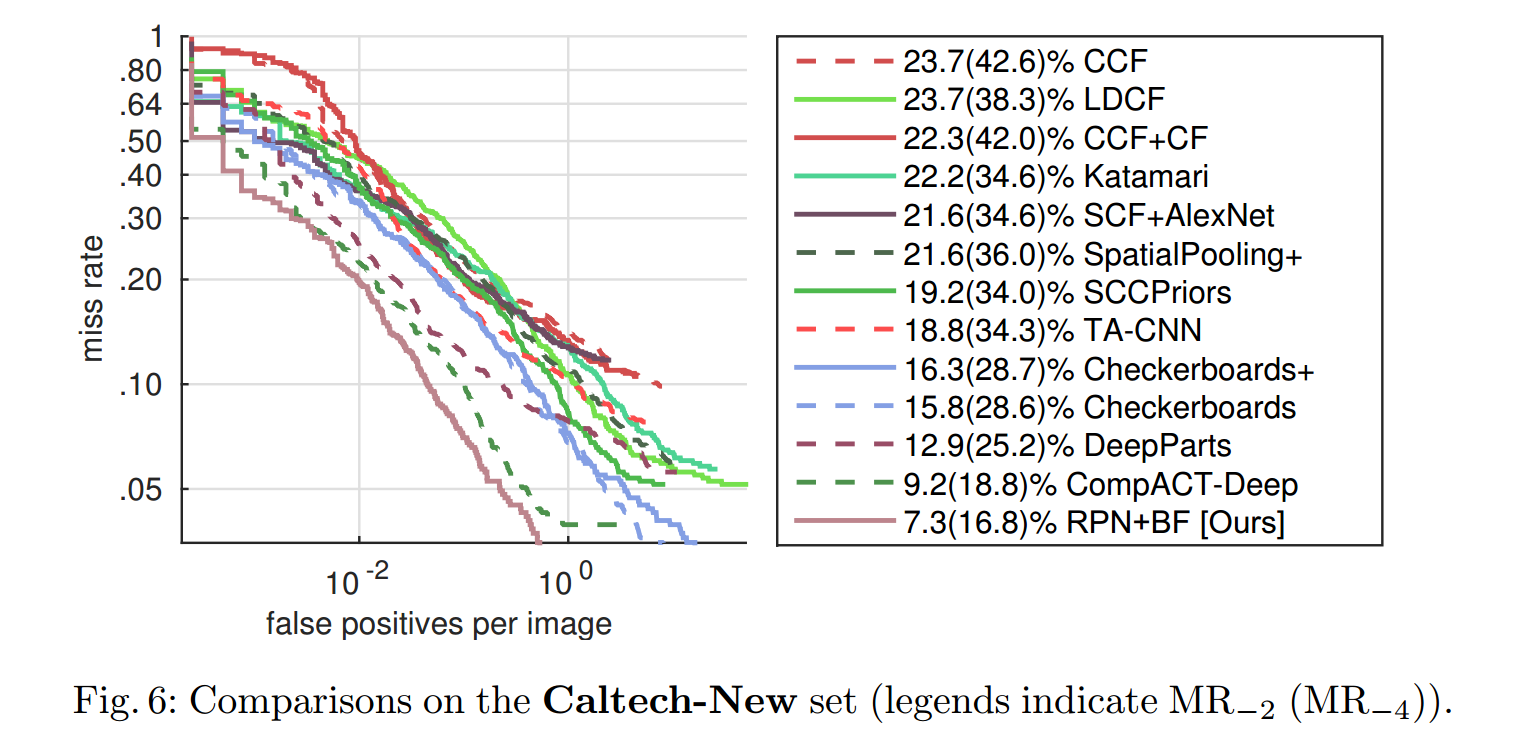
本文的实验,可谓相当的充分啦,在4个数据集上做了实验,与上图许多种方法做了对比,又充分分析了自己算法各个成分对最终精度的影响,额,想想自己的实验设计,额,差距不小。。。
评价:
本文是中山大学的师兄李亮哥的毕业之作,能在微软实习并且和大神 Kaiming He 合作搞出顶会,是一种怎样的体验?额 又扯远了,哈哈
说重点,总体而言,本文在做实验的基础上,发现了 faster RCNN 在行人检测方面的不足,在实践中发现科研问题,深度挖掘身体背后的原因,并且结合已有的技术,完美的将其解决,本身就为我们提供了一个很好的科研思路和科研案例,值得我们学习!
就其流程设计来看,并不花哨,也灭有各种装逼的公式,但是很好的发现了问题,分析了背后的原因,并且将其解决的很漂亮,这一点难能可贵!从问题出发,在路上 。。。
论文阅读之:Is Faster R-CNN Doing Well for Pedestrian Detection?的更多相关文章
- 论文阅读(Xiang Bai——【CVPR2015】Symmetry-Based Text Line Detection in Natural Scenes)
Xiang Bai--[CVPR2015]Symmetry-Based Text Line Detection in Natural Scenes 目录 作者和相关链接 方法概括 创新点和贡献 方法细 ...
- 论文阅读笔记三十三:Feature Pyramid Networks for Object Detection(FPN CVPR 2017)
论文源址:https://arxiv.org/abs/1612.03144 代码:https://github.com/jwyang/fpn.pytorch 摘要 特征金字塔是用于不同尺寸目标检测中的 ...
- 【计算机视觉】【神经网络与深度学习】论文阅读笔记:You Only Look Once: Unified, Real-Time Object Detection
尊重原创,转载请注明:http://blog.csdn.net/tangwei2014 这是继RCNN,fast-RCNN 和 faster-RCNN之后,rbg(Ross Girshick)大神挂名 ...
- 论文阅读笔记五十一:CenterNet: Keypoint Triplets for Object Detection(CVPR2019)
论文链接:https://arxiv.org/abs/1904.08189 github:https://github.com/Duankaiwen/CenterNet 摘要 目标检测中,基于关键点的 ...
- 【论文阅读】A practical algorithm for distributed clustering and outlier detection
文章提出了一种分布式聚类的算法,这是第一个有理论保障的考虑离群点的分布式聚类算法(文章里自己说的).与之前的算法对比有以下四个优点: 1.耗时短O(max{k,logn}*n), 2.传递信息规模小: ...
- 论文笔记之:Learning Cross-Modal Deep Representations for Robust Pedestrian Detection
Learning Cross-Modal Deep Representations for Robust Pedestrian Detection 2017-04-11 19:40:22 Moti ...
- 论文阅读 | FCOS: Fully Convolutional One-Stage Object Detection
论文阅读——FCOS: Fully Convolutional One-Stage Object Detection 概述 目前anchor-free大热,从DenseBoxes到CornerNet. ...
- 论文阅读 | Region Proposal by Guided Anchoring
论文阅读 | Region Proposal by Guided Anchoring 相关链接 论文地址:https://arxiv.org/abs/1901.03278 概述 众所周知,anchor ...
- YOLO 论文阅读
YOLO(You Only Look Once)是一个流行的目标检测方法,和Faster RCNN等state of the art方法比起来,主打检测速度快.截止到目前为止(2017年2月初),YO ...
随机推荐
- Mac下为我们开发的App制作gif动画演示(不仅仅针对开发者,想做gif图片的也可参考)
趁着工作不忙,就闲着倒腾自己的事情,把自己写的一个完整App<丁丁印记>整理了一番,总结其中用到的技术和实现的功能,并想把一些用到的技术分享给各位工友们,因为我自学iOS开发得益于大家的分 ...
- fdisk分区
查看文件系统: # df -hFilesystem Size Used Avail Use% Mounted on/dev/sda1 20G 1.1G 18G 6% /tmpfs 1.9G 0 1.9 ...
- poj2777 线段树
//Accepted 4768 KB 391 ms //线段树,延时标记的应用 //对于每一段,用一个int表示被着色的情况,change标记该段的颜色是否发生整体的改变,即这一段 //用没用被全部涂 ...
- EditText提示文字
如图,在没有输入文字前,会显示提醒文字. 引用的是文本文件(strings.xml)中的对应文字 activity_main.xml对应的红色代码: <?xml version="1. ...
- win7下利用笔记本无线网卡创建AP 组建无线局域网(可以连魔兽,TCP、UDP也没问题)
转自:http://blog.163.com/fghok_018/blog/static/122599670201072773924530/ 近一个月,宿舍的好多同学都买了笔记本电脑,当然,我也买了, ...
- hdu 2041
ps:这道题之前一直没思路,有大神提醒我用递推,但当时没搞清...今天做了那个小蜜蜂..才懂得用递推做这道题.. 代码: #include "stdio.h"long long d ...
- task2
1. 邮件修改Mailtemplatereportfieldlink带<>的都改翻译${MAWBTask} 2.测试发邮件 3.找出能做成模版的所有地方,改成模版,复杂的地方记录下来
- UIControl的使用
在开发当中,可能很多时候都需要做个点赞的需求,如果用按钮实现,按钮作为一个系统复合控件,外部是一个 View-->UIControl的容器, 内部包含了UILabel和UIImage,以及一些排 ...
- [super init]方法的调用
当重新覆盖父类的init方法时,需要调用[super init]方法确认父类中的init是返回一个实例,而不是一个空的实例. 那为什么要调用这个呢? 我得猜测是这样的:因为这是一个初始化方法,需要对对 ...
- Interview----2 sum
题目:输入一个已经按升序排序过的数组和一个数字, 在数组中查找两个数,使得它们的和正好是输入的那个数字. 要求时间复杂度是 O(n).如果有多对数字的和等于输入的数字,输出任意一对即可. 例如输入数组 ...