点云ICP注册
背景
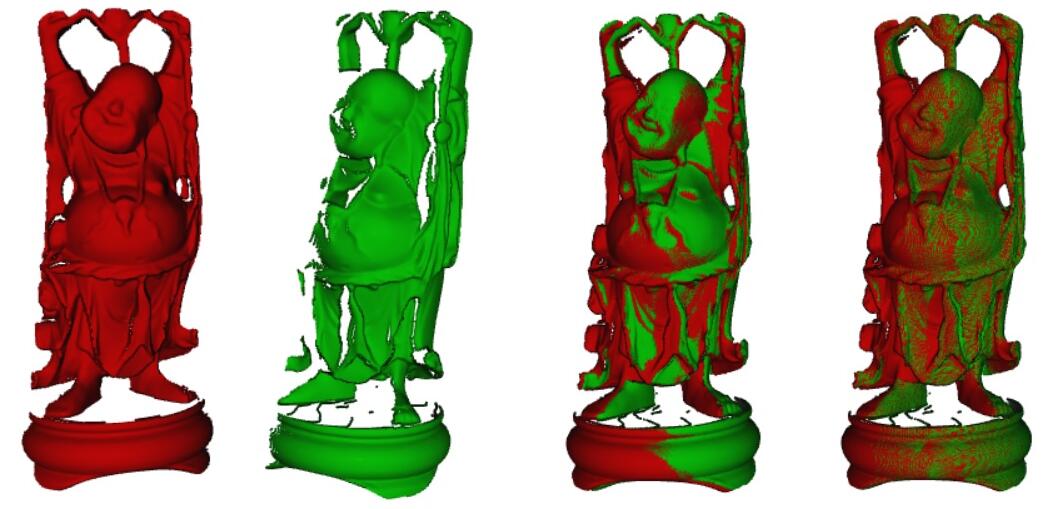
两个点云要注册在一块,一般分两个步骤:先做一个大致的对齐,也就是所谓的初始注册,一般可以通过一些可靠的点对来计算得到(如图3所示);然后在初始注册的基础上进行精细注册,提升注册的精度(如图4所示)。精细注册的方法,一般采用ICP算法,也就是最近点迭代的方法。
ICP算法总览
下面先总的介绍一下ICP算法,之后再详细介绍里面的一些重要步骤。
算法输入是两片有部分重叠的点云a和b,并且已经初始注册好了,输出是ICP注册的刚体变换T:
1. 对b进行点采样,得到采样点集s
2. 在a中寻找采样点集s的最近对应点,得到点对集合c
3. 对c中的点云进行加权处理,并删掉一些不好的点对
4. 应用目标能量来优化点对距离,得到刚体变换Ti。Ti对采样点集进行刚体变换
5. 迭代步骤2-4,直到目标能量优化停止。T=Tn * ...... T1 * T0

点采样
由于计算速度的要求,一般是需要对点云b进行采样。然后用采样点去找对应进行优化。除了计算上的要求,如果用全点云进行匹配的话,精度也不会更加的好。因为更好的采样方法可以避免陷入能量局部极小的情况。常见的采样方法有均匀采样和几何采样。
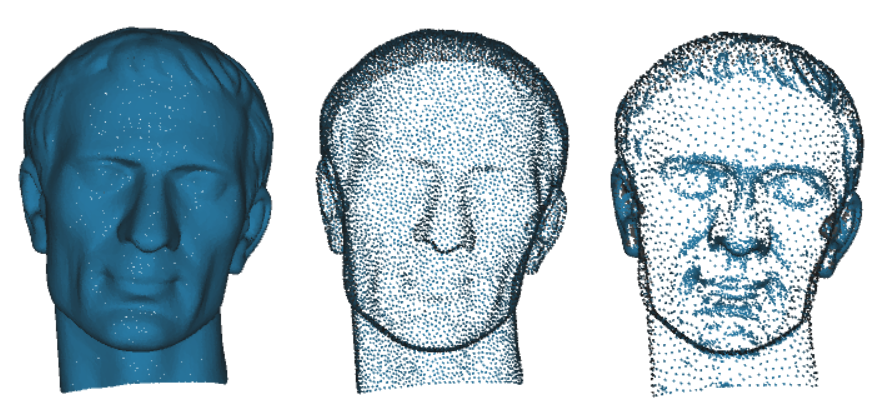
- 均匀采样:采样点分布均匀,采样速度快,适合几何特征比较多的点云。因为这样的点云,均匀采样总能采样到几何特征。如果几何特征少的话,如下左图所示,有可能就采样不到几何特征。
- 几何采样:采样点会在几何特征明显的地方被采样到,如下右图所示。它能够抓住点云的几何特征,使得注册精度更高,更稳定。计算速度可能会慢一些,并且不太适合噪音比较大的点云,因为噪音其实就是几何特征了。

一个比较理想的采样方法,既能够采样到点云的几何特征,分布上也能做到局部均匀,然后就是计算速度要快。下面是一个采样示例,左图是原始点云,中间图是均匀采样,右图是几何采样。
点对应
从ICP的名字,就能看出点对应怎么去找,也就是给每个采样点找最近点。查找最近点是比较简单的,一般用KD Tree来加速查找。这些点对,有些是无效的,需要剔除掉。常用的剔除策略有距离和法线:
- 距离:点云a和b一般只有部分重叠,b的采样点集里,有部分点在a里是没有对应的。记这部分点为c,那么c的对应点对是需要剔除掉的。经过观察,我们发现c的点对距离一般是比较大的,所以可以设置一个距离阈值,来过滤掉这些点对。这个阈值算是一个参数了,可以根据点云的平均距离来设置,迭代开始的时候设置的大一些,如果找到的点对数目太少,可以适当的增大这个距离阈值。ICP迭代过程中,点云距离会逐渐减小,这个距离阈值也可以随之动态减小。
- 法线:在ICP迭代初期,点云位姿相差比较大,很多距离相近的点对也是错误的无效点对。我们可以根据点的一些属性来过滤掉这些无效的点对。常用的属性就是点云法线。比如点法线夹角要小于一个角度阈值。这个阈值和距离阈值一样,也是动态变换的。
目标能量
常用的目标能量有两种:点到点的能量和点到平面的能量。直观上讲,点到点的能量如左图所示,优化的是有效点对之间的距离;点到平面的能量,如右图所示,优化的是点到点云局部平面的距离。

- 点到点的能量:∑ || a - T(s) ||:其中s是点云b的有效采样点,a是s对应的点,T是刚体变换
- 点到平面的能量:∑ || (a - T(s)) * n(s) ||:其中n(s)是采样点s的法线
这两个能量,各有优缺点:
- 速度:本质上两个能量都是优化两个点云曲面的距离,点到点能量是线性收敛,点到平面能量的迭代等价于Gauss-Newton迭代,它的收敛速度是优于线性收敛的,情况好的时候,可以达到二阶收敛速度。
- 点到点能量不需要法线信息。有时候可靠的法线信息不容易得到,比如曲面严重不光滑,噪音十分严重,或者点云相对于物体采样非常稀疏等。不可靠的法线会使得点到平面的能量优化不稳定。
求解目标能量
能量里面只有T的旋转变换是非线性的,可以转化成线性最小二乘求解。常用的两种转化方式:
- 一种是把T当作仿射变换,对求解得到的T做SVD分解,求得仿射变换在刚体变换空间中的投影
- 另一种是把旋转矩阵用欧拉角的方式来表示,这样T里面的非线性部分就是sin和cos。我们假设每次迭代刚体变换的旋转角度不大,则cos(theta) = 1, sin(theta) = theta。这样就把T转化为线性矩阵了。
迭代停止条件
迭代算法总要有个停止条件。这个看似平凡的步骤,却是所有迭代算法的关键。它能影响算法最终的效果和性能。ICP常见的迭代停止条件:
- 最大迭代次数
- 迭代过程中,刚体变换近似恒等变换了
- 迭代过程中,点云之间的距离小于一定的阈值
- 迭代过程中,点云之间的距离越来越大了,需要中止无效迭代。或者更新算法参数重新迭代。
有兴趣的读者,欢迎参考视频版本
点云ICP注册的更多相关文章
- AWS、Azure和Google的云容器注册表有什么区别?
亚马逊云计算服务(AWS).谷歌云服务和微软Azure,这三大公共云平台都提供Docker容器注册表.虽然他们的产品看起来很相似,但开发人员在做出选择之前,应该先了解价格和功能方面的差异. 公共云供应 ...
- bmob云 实现注册和登录的功能
向大家介绍一款我感觉非常溜的一款后端云服务bmob云 借助bmob云我们可以实现注册和登录页面的功能,下面就让我给大家演示一下借助bmob云服务实现这两个功能吧. 1. 用户是一个应用程序的核心.对 ...
- 阿里云域名注册详解与Github绑定
关注我,每天都有优质技术文章推送,工作,学习累了的时候放松一下自己. 本篇文章同步微信公众号 欢迎大家关注我的微信公众号:「醉翁猫咪」 今教一篇如何注册域名,拥有自己的域名是不是很爽呢?答案是是的,那 ...
- git的基本操作命令和码云的注册使用
Git文件操作文件的四种状态版本控制就是对文件的版本控制,要对文件进行修改.提交等操作,首先要知道文件当前在什么状态,不然可能会提交了现在还不想提交的文件,或者要提交的文件没提交上. Untracke ...
- KinectFusion 介绍
原文链接 KinectFusion简介 KinectFusion是微软在2011年发表的一篇论文里提到的点云重建的方法,论文题目是:KinectFusion: Real-Time Dense Surf ...
- 潭州课堂25班:Ph201805201 django 项目 第三课 码云注册,django项目 (课堂笔记)
d码云注册,登录, 创建项目: 生成秘钥 想看秘钥: 添加公钥 复制 ssh 连接 通过 git clone <ssh> 连接 在服务器上创建 python3 虚拟环境, 创建项目 p ...
- PCL点云配准(2)
(1)正态分布变换进行配准(normal Distributions Transform) 介绍关于如何使用正态分布算法来确定两个大型点云之间的刚体变换,正态分布变换算法是一个配准算法,它应用于三维点 ...
- iOS:融云即时通讯快速集成
一.介绍 即时通讯在众多社交软件.生活软件以及教育软件中已经是必备的功能了,在当前国内,即时通讯SDK做的比较不错的有那么几家,例如环信SDK.融云SDK...,这两家做的都很不错,各有千秋吧,要是真 ...
- 阿里云产品介绍(二):云服务器ECS的孪生兄弟们
上一篇介绍的云服务器ECS,是阿里云最基础的产品,也是每一个云计算厂商最基础的产品,俗称爆款.除了标准的云服务器,阿里云也不停的在推出面向特殊业务场地的云服务器,可以说是ECS的孪生兄弟们. 这一篇就 ...
随机推荐
- spring MVC 后端 接收 前端 批量添加的数据(简单示例)
第一种方式:(使用ajax的方式) 前端代码: <%@ page contentType="text/html;charset=UTF-8" language="j ...
- 针对windows10 10.4号升级后VMware低版本不能使用的问题
windows在10.4号下午发布的新版补丁升级,VMware老版本不能打开,之后发现好多小伙伴都在贴吧发帖子VMware不能用,提示升级,犯愁升还是不升,老版本的安装了好几个虚拟机,换成新版不知道能 ...
- vue前端与django后端数据交互
//把数据传到路径为/airCdt/的django后端函数进行数据处理 onSubmit(){ const dict={ 'floor': this.formLabelAlign.floor, 'ro ...
- JAVA笔记6-继承和权限控制
1. (1)类的成员的权限修饰符有public,protected,private或default,限定其他对象对该类对象成员的访问权限. (2)class的权限修饰符只可以是public或defau ...
- HTML新手入门(1)
HTML新手入门(1) ——编译器下载及基础框架 一.编译器下载 作为新手,听取大佬的建议,用HBuilder进行编译. 下载地址:www.dcloud.io/ 进入到首页左上角有一个如下图标. (这 ...
- 数组遍历 forEach 方法
数组的遍历 遍历数组,将数组中的所有元素都取出来. 使用for 循环执行数组的索引(length-1)相同的次数. var arr=["1", "5", &qu ...
- chromedriver.exe,自动化web, 安装谷歌驱动,以及可能遇到的坑
1.下载谷歌驱动:chromedriver.exe http://chromedriver.storage.googleapis.com/index.html (下载驱动的链接) 2.把下载的chro ...
- Release和Debug的区别
Debug与Release版本的区别 Debug 和 Release 并没有本质的区别,他们只是VC预定义提供的两组编译选项的集合,编译器只是按照预定的选项行动.如果我们愿意,我们完全可以把Debug ...
- java支持断点续传文件上传和下载组件
java两台服务器之间,大文件上传(续传),采用了Socket通信机制以及JavaIO流两个技术点,具体思路如下: 实现思路: 1.服:利用ServerSocket搭建服务器,开启相应端口,进行长连接 ...
- Visual Studio 2008:路径设置
造冰箱的大熊猫,本文适用于Visual Studio 2008中文版@cnblogs 2018/11/30 1.头文件路径设置 如果头文件所在路径未在环境变量中定义,编译时会出现C1083错误,提示无 ...