【STM8】外挂存储器W25Q16
好像有几张图片被强制缩小了?看到这篇博客的人先对你们说声抱歉,我不知道怎么设置
文字就可以很长(文章宽度的全部),图片就只有文章宽度的2/3宽度
开新分页应该就是原始尺寸了,这点还是和大家说抱歉。。。
文章里面提到的页编程,就是写数据了,因为这是英文直译的结果(PageProgram)
为了测试这个外挂Flash存储器,我在淘宝买了一个小板,3元不到
其实也可以直接买芯片回来自己接,反正没几个元件
这个芯片是用SPI通讯的
我找不到没水印的图片,暂时先用W25Q128的
不过他俩板子长得一模一样,元件也一样。除了芯片型号

板子上的LED和电阻串联,上电后LED就亮,没别的意思
电容是滤波用的,它紧靠芯片的VCC引脚
另外附上两个链接,这是我之前写的博客,是关于『STM8开发环境』和『STM8 - SPI通讯』,这篇博客的测试基础,是建立在STM8上的
关于如何接线,SPI通讯这篇博客有提到,如果有需要可以观看
STM8开发环境:https://www.cnblogs.com/PureHeart/p/10824556.html
STM8 - SPI通讯:https://www.cnblogs.com/PureHeart/p/10749264.html
SPI相关知识有了,就可以开始了
开始之前,还是先介绍一下大纲
【W25Q16芯片介绍】:芯片命名规则、芯片引脚图、引脚功能介绍
【W25Q16指令】:官方定义的指令,还有时序图介绍
【W25Q16初步测试】:执行其中一个指令(读取芯片ID),看看执行的效果,以此确认步骤是否正确,如果这一步都不正确,就不用谈最主要的读和写吧?
【W25Q16状态寄存器】:寄存器的一些状态,例如芯片是不是在忙、是不是处于保护状态、保护的区域、是否可写状态。。。等等
【W25Q16读、写、擦除】:读、写、擦除相关代码
【W25Q16芯片介绍】
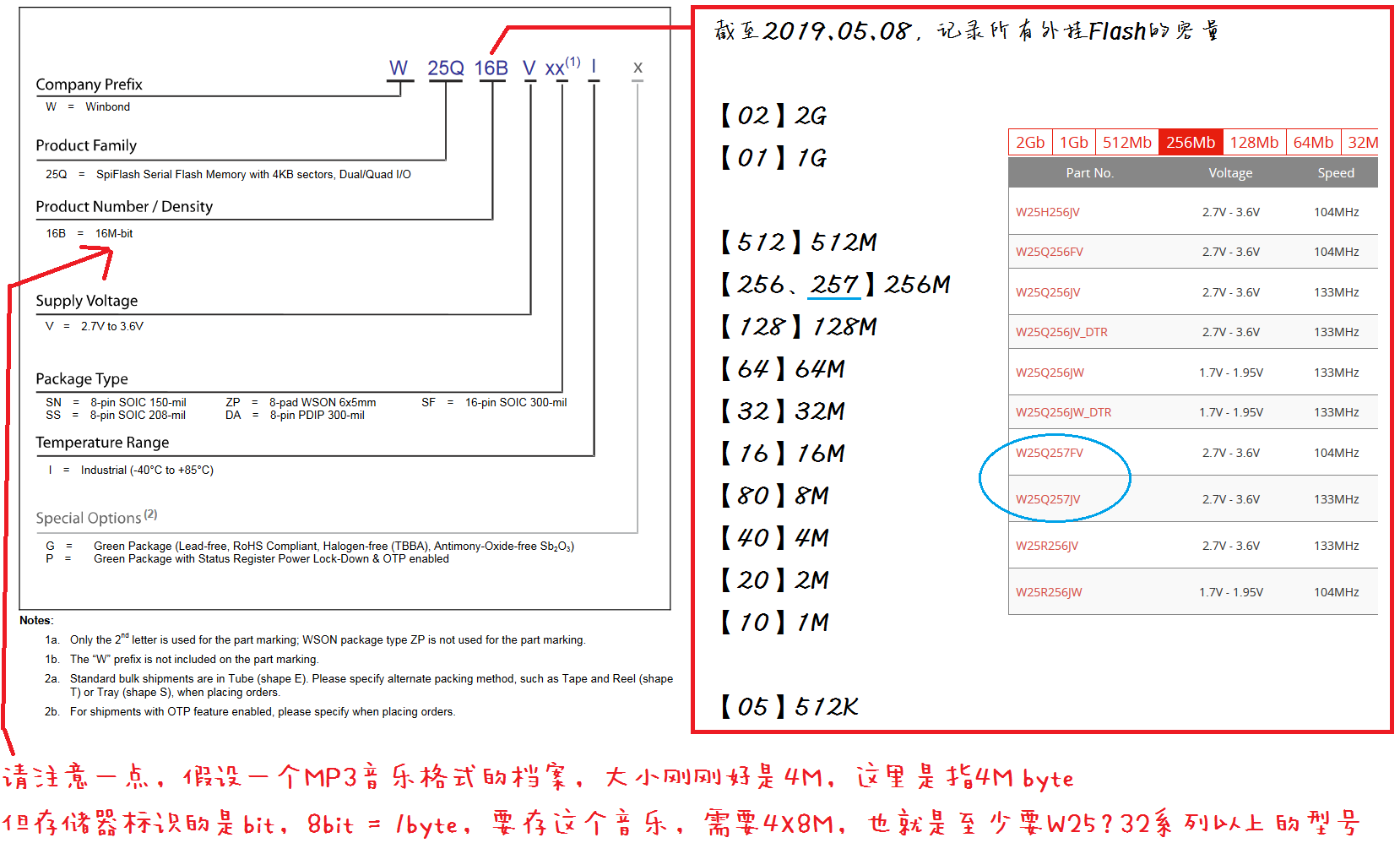
应该很好理解,像W25Q02系列,就是2G的Flash,下方的红字也提醒了,这是2G bit,像我们下载的电影、音乐,这些都是byte为单位的,设计的时候要考虑一下
另外这是华邦的官网,选型方面,或是datasheet,都可以在这里找到:https://www.winbond.com/hq/product/code-storage-flash-memory/serial-nor-flash/?__locale=zh
不在官网找的话,我也有上传到我的度盘:https://pan.baidu.com/s/1bHmk4o1C3I5JweayWsFGqw
提取码:iq4j
W25Q16的引脚如下

统一说明:前方有斜线的/,例如/CS,这个斜线代表低电平使能
【/CS】:片选引脚,低电平呢芯片工作,高电平芯片就罢工,当然,别想着一劳永逸这种事,直接把它接GND,我就吃到苦头了,这引脚请务必接GPIO
【DO】:数据输出
【/WP】:写保护,低电平呢只能读,高电平就随你读写
【GND】:接地
【DI】:数据输入(接收外来的指令)
【CLK】:时钟
【/HOLD】:数据暂停控制,低电平代表暂停,高电平工作,通常用于多个设备共享一个SPI,如果只有一主一从,可以把这引脚接VCC
【VCC】:2.7~3.6V
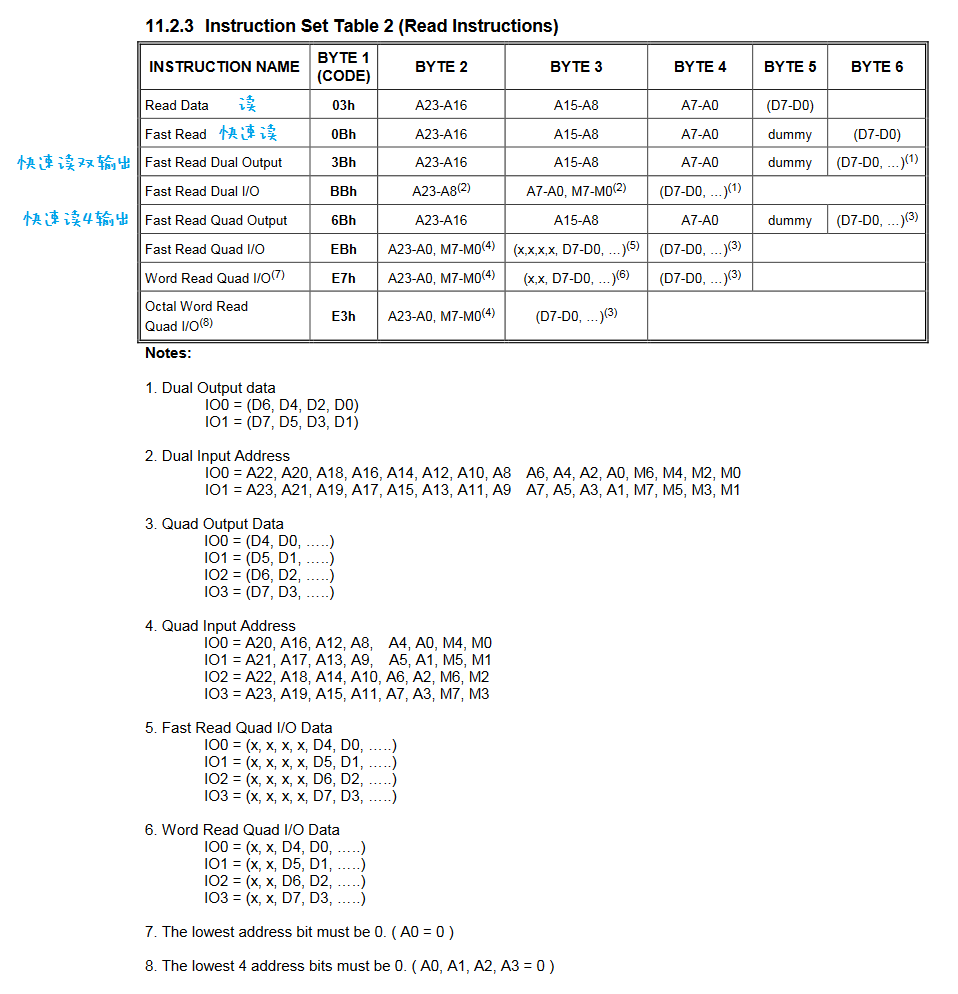
另外,这个芯片可以支持『双输出』和『四输出』,可以提升读数据的速度
具体的方法是把其他引脚的功能都改为输出(IO1、2、3、4)
就好比大家的车速都一样,道路有两条的情况下,一定比只有一条道路,处理车流量来的快
在引脚图的上方,有芯片的介绍,其中会看到104MHz、208MHz、416MHz
分别是SPI单输出、双输出和四输出
遗憾的是STM8的SPI,最快也只有10MHz左右,想要处理双输出和四输出,是不可能的
不过对于我的项目来说,这已经足够了
【W25Q16指令】

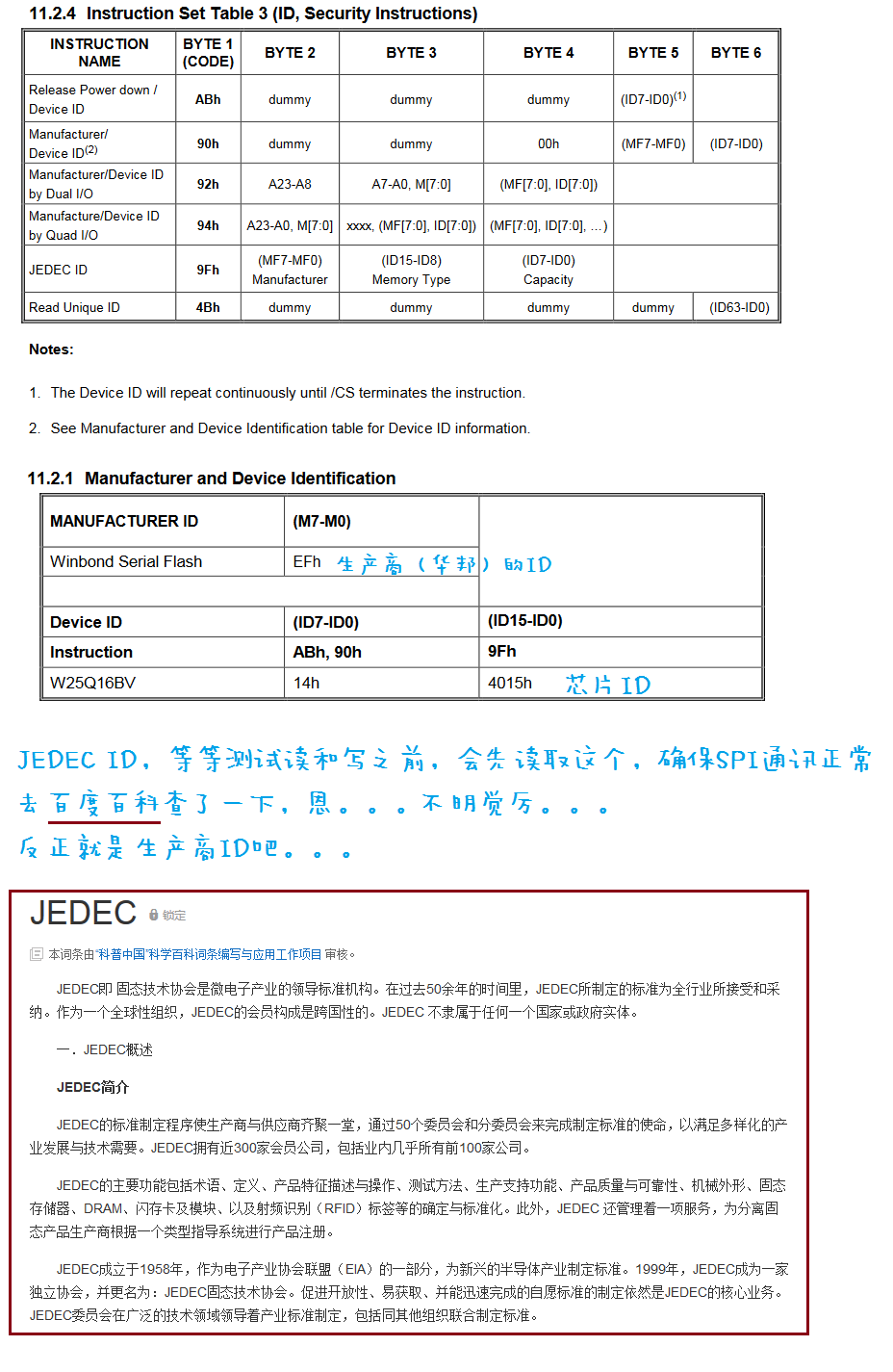
下面介绍写使能的时序图,但是在『W25Q16初步测试』的环节中,会读取JEDEC ID(指令发送0x9F),最终看看W25Q16有没有反馈『生产商ID』和『芯片ID』给我

给下降沿的原因,在介绍引脚图时,片选引脚/CS已经说明了,下达每个指令之前,必须给下降沿
DI,也就是W25Q16接收的数据,0x06,文章往上拉找到指令的图片,找对应的位置,0x06就是写使能
DO,因为这个指令不需要反馈数据给主机,所以是高阻态
【W25Q16初步测试】

我是透过Uart来打印数据的,图片左上有示意图
用示意图上的1234来表示流程,就是『1 234 234 234 234 234 234 234 234 234 234』
234出现了十次,因为在『SPI接收中断』里面,判断count < 10
除了第一个『2』是指令(0x9F)以外,后面所有的『2』全部都是伪字节(0xFE),这是为了制造时钟给从机,在我另一篇博客有提到
下面贴上完整代码,另外附上链接,需要代码的朋友也可以下载
地址:https://pan.baidu.com/s/1Or5cWBaKLYl2-F-4qikSrA
提取码:4pbw
#include"iostm8s103F3.h"
#include "W25Qxx.h" typedef unsigned char u8;
typedef unsigned short int u16;
typedef unsigned int u32; void UART1_sendchar(unsigned char c);
void SPI_sendchar(unsigned char c); u8 count = 0; /* ====================================== */
/* ============ 【Uart】init ============ */
/* ====================================== */
void Init_UART1(void)
{
UART1_CR1 = 0x00;
UART1_CR2 = 0x00;
UART1_CR3 = 0x00;
// 设置波特率,必须注意以下几点:
// (1) 必须先写BRR2
// (2) BRR1存放的是分频系数的第11位到第4位,
// (3) BRR2存放的是分频系数的第15位到第12位,和第3位
// 到第0位
// 例如对于波特率位9600时,分频系数=2000000/9600=208
// 对应的十六进制数为00D0,BBR1=0D,BBR2=00 UART1_BRR2 = 0x00;
UART1_BRR1 = 0x0d; UART1_CR2 = 0x2c; // 允许接收,发送,开接收中断
} /* ====================================== */
/* =========== 【Uart】发送函数 ========= */
/* ====================================== */
void UART1_sendchar(unsigned char c)
{
while((UART1_SR & 0x80) == 0x00); // 等待发送缓冲区为空
UART1_DR = c;
} /* ====================================== */
/* =========== 【Uart】接收中断 ========= */
/* ====================================== */
#pragma vector= UART1_R_OR_vector//0x19
__interrupt void UART1_R_OR_IRQHandler(void)
{
PC_ODR_ODR4 = 0; // 串口收到数据后进入中断,先给W25Qxx下降沿,等等透过SPI发送指令
SPI_sendchar(UART1_DR); // 发送SPI数据(UART接收到什么就发什么),然后等待SPI中断,实现自发自收
} /* ====================================== */
/* ============ 【SPI】init ============= */
/* ====================================== */
void Init_SPI(void)
{
CLK_PCKENR1 |= 0x02; //打开SPI时钟
/*PC6、PC5设置为输出,最大10MHz*/
//PC_DDR = 0x60; // 用下方比较详细的写法
//PC_CR1 = 0xe0; // 用下方比较详细的写法
//PC_CR2 = 0x60; // 用下方比较详细的写法 PC_DDR_DDR4 = 1; // 配置PC4(/CS)端口为输出模式
PC_CR1_C14 = 1; // 配置PC4(/CS)端口为推挽输出模式
PC_CR2_C24 = 1; // 配置PC4(/CS)端口为高速率输出 PC_DDR_DDR5 = 1; // 配置PC5(SCK)端口为输出模式
PC_CR1_C15 = 1; // 配置PC5(SCK)端口为推挽输出模式
PC_CR2_C25 = 1; // 配置PC5(SCK)端口为高速率输出 PC_DDR_DDR6 = 1; // 配置PC6(MOSI)端口为输出模式
PC_CR1_C16 = 1; // 配置PC6(MOSI)端口为推挽输出模式
PC_CR2_C26 = 1; // 配置PC6(MOSI)端口为高速率输出 PC_DDR_DDR7 = 0; // 配置PC7(MISO)端口为输入模式
PC_CR1_C17 = 1; // 配置PC7(MISO)端口为弱上拉输入模式
PC_CR2_C27 = 0; // 禁止PC7(MISO)端口外部中断 SPI_ICR_RXIE = 1; // 开启SPI中断接收 // [7]先发MSB
// [6]禁止SPI
// [5][4][3]f_Master / 2
// [2]主设备
// [1]空闲时SCK保持低电平
// [0]数据采样从第一个时钟沿开始
SPI_CR1 = 0x04; /*MSB、1MHz、主设备、CPOL空闲为低、CPHA第一个时钟开始*/ // [7]双线单向模式
// [6]输入使能(只接收模式)
// [5]CRC计算禁止
// [4]下个发送数据来自Tx缓冲
// [3]保留
// [2]全双工(同时收发)
// [1]使能软件从设备管理(不需要判断硬件CS位,节省一个引脚)
// [0]主模式
SPI_CR2 = 0x03; /*双线单向视距传输、CRC计算禁止、软件NSS、主模式*/ SPI_CR1_SPE = 1; // 打开SPI
} /* ====================================== */
/* =========== 【SPI】发送函数 ========== */
/* ====================================== */
void SPI_sendchar(unsigned char c)
{
while(!(SPI_SR & 0x02)); // 等待发送缓冲区为空
SPI_DR = c; // 将发送的数据写到数据寄存器
//while(!(SPI_SR & 0x01)); // 等待接收缓冲区非空,这是轮询的方式,但是我想在中断来处理
//UART1_sendchar(SPI_DR);
} /* ====================================== */
/* =========== 【SPI】接收中断 ========== */
/* ====================================== */
#pragma vector=SPI_RXNE_vector
__interrupt void SPI_RXNE_IRQHandler(void)
{
//RxBuf[cnt++]=SPI_DR;
while(!(SPI_SR & 0x01));
UART1_sendchar(SPI_DR); // 把SPI接收到的数据,透过UART,传回给USB转TTL小板
count++;
if(count < 10) SPI_sendchar(0xfe); // 发送伪字节
else
{
count = 0;
PC_ODR_ODR4 = 1; // 重新置为高电平,等待下一次的指令
}
} /* ====================================== */
/* ============== 【Main】 ============== */
/* ====================================== */
main()
{
Init_UART1();
Init_SPI();
PC_ODR_ODR4 = 1; // 初始上电给高电平,后续W25Qxx在执行指令前,再给下降沿 asm("rim"); // 开中断,sim为关中断
while (1);
}
【W25Q16状态寄存器】
文章有点长,再说明一个寄存器就好了
先上一张图,这是状态寄存器里的内容

下面是寄存器内各个『位』的说明,另外『R』代表『只可读』,『W』代表『只可写』,『RW』代表『可读可写』
【BUSY】(R):芯片在忙的时候,状态=1,不忙时=0,什么时候在忙呢?执行『页编程』『任何一种擦除』『写状态』都是,芯片忙完这些事会自动清0
【WEL】(R):『写保护』位,执行写使能后,由芯片自动置1,芯片处于『写保护』时该位=0,写禁用状态发生在『通电时』『写禁止』『页编程』『任何一种擦除』和『写状态寄存器』
【BP0、1、2】(RW):这三位决定了需要保护的区域,例如一些固件,你不想后续被修改的东西,都可以保护。默认为0,另外,它和TB、SEC位有关。这里不做过多介绍,我的项目没有用到,还没研究,未来有时间再看看。
【TB】(RW):默认为0,可以决定是『顶部』或是『底部』需要保护,例如有100个保险柜,你要保护前10个,或是保护最后20个,具体位置请参考上面的图片。这里不做过多介绍,我的项目没有用到,还没研究,未来有时间再看看。
【SEC】:非易失性扇区保护位。这里不做过多介绍,我的项目没有用到,还没研究,未来有时间再看看。
【SRP0、1】(RW):状态寄存器保护位,默认为0。
❶ SPR=0:不能控制状态寄存器的『禁止写』
❷ SPR=1、引脚/WP=低电平:『写状态寄存器』的指令失效
❸ SPR=1、引脚/WP=高电平:可以执行『写状态寄存器』的指令
【SUS】(R):挂起状态位是状态寄存器,在执行擦除挂起(75h)指令后设置为1。SUS状态位通过擦除恢复(7ah)指令以及断电、通电循环清除为0。
【QE】(RW):四输出使能位是状态寄存器。当qebit设置为0状态(出厂默认值)时,/wp pinand/hold被启用。当qebit设置为1时,将启用四个io2和io3引脚,并禁用/wp和/hold功能。
Warning:如果在标准SPI或双SPI操作期间/wp或/hold引脚直接连接到电源或接地,则QE位不应设置为1。
看到这里的朋友,先和你们说声抱歉,读取状态寄存器我真的没有试出来,每次读取都是0x00 0x00 0x00 0x00。。。
我尝试执行『写使能』,然后读取状态寄存器,还是0x00 0x00 0x00 0x00。。。
我再尝试执行『写禁止』,然后读取状态寄存器,还是0x00 0x00 0x00 0x00。。。
照理说,『写使能』和『写禁止』应该会改变『WLE』这一位,结果没有,真是百思不得其解(读JEDEC ID都正常,所以不是我接线,或是SPI通讯的问题)(JEDEC上面说过了,是生产商ID)
唉。。。
【W25Q16读、写、擦除】
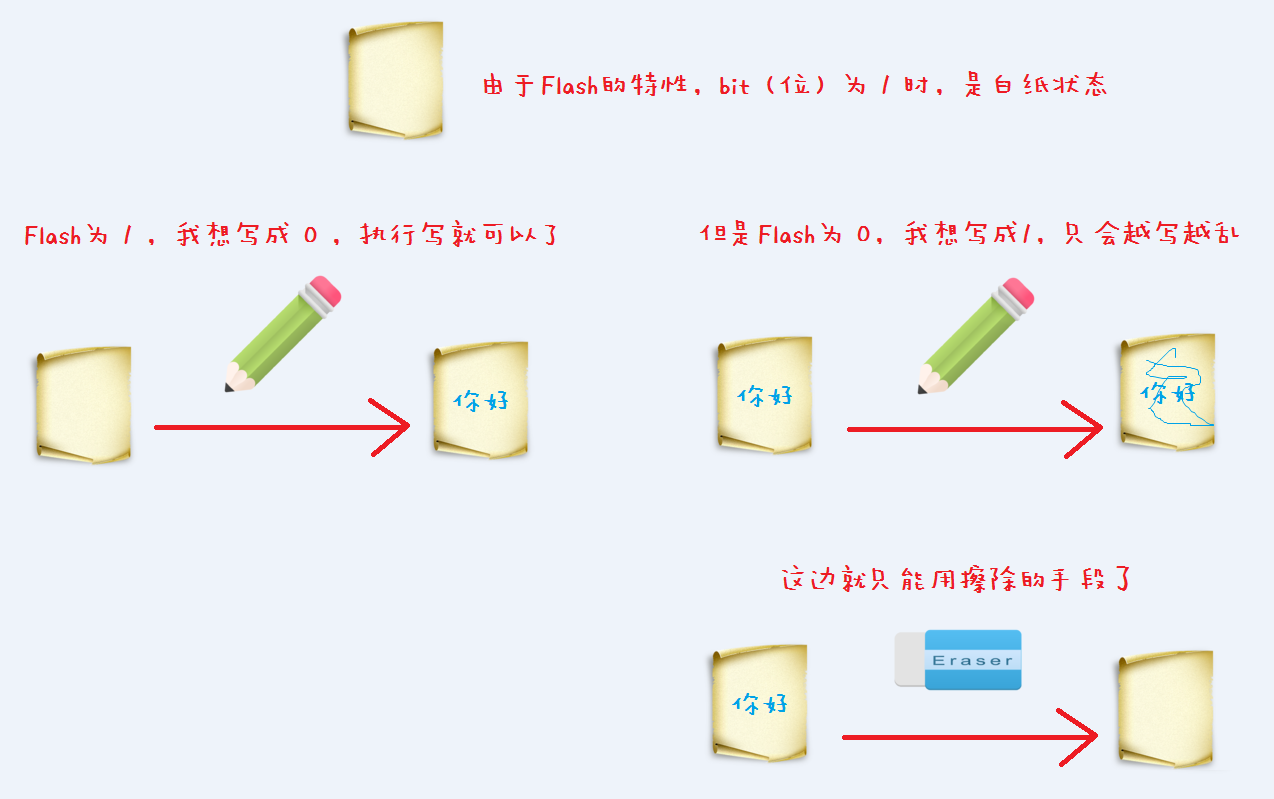
在说明读和写之前,先说明一下Flash的物理特性:Flash只能写0,不能写1
上一张图,来解释这个特性
有人说,写的时候不用擦除,那是因为特殊情况
第一天,Flash的值是0xFF(1111 1111),我写入0xF0(1111 0000)【高4位都是1➜1,没有影响】【低4位是1➜0,由于是写0的动作,所以无需擦除】
第二天,Flash的值是0xF0(1111 0000),我写入0x00(0000 0000)【高4位是1➜0,由于是写0的动作,所以无需擦除】【低4位是0➜0,这也是写0动作,无需擦除】
这些情况还不需要擦除,除非到某一天,你想写一个数据,不管这8位的哪一位要变成1,那么就必须擦除了
理解这个特性,能有效的增加Flash的寿命,在这篇博客,引脚图的上方,有芯片介绍,里面有一段英文『More than 100,000 erase/write cycles』
芯片能让你擦除10万次
具体要不要让你的程序复杂些,但是能让芯片寿命增长,就要自行斟酌了
讲了这么多,下面终于可以开始重头戏了
这个读写的代码,基本上和上面的读ID代码类似,只增加了两个变量,和修改两个中断
【1】定义两个变量,testAddress、command
【2】串口接收中断
【3】SPI接收中断
u32 testAddress = 0x000000;
u8 command = 0; // 【0:写使能、写禁止、芯片擦除】【1:写】【2:读】 /* ====================================== */
/* =========== 【Uart】接收中断 ========= */
/* ====================================== */
#pragma vector= UART1_R_OR_vector//0x19
__interrupt void UART1_R_OR_IRQHandler(void)
{
PC_ODR_ODR4 = 0; // 串口收到数据后进入中断,先给W25Qxx下降沿,等等透过SPI发送指令 if (UART1_DR == 0x01) // 页编程
{
command = 1;
SPI_sendchar(PageProgram);
}
else if (UART1_DR == 0x02) // 读数据
{
command = 2;
SPI_sendchar(ReadData);
}
else if (UART1_DR == 0x03) // 写使能
{
command = 0;
SPI_sendchar(WriteEnable);
}
else if (UART1_DR == 0x04) // 写禁止
{
command = 0;
SPI_sendchar(WriteDisable);
}
else if (UART1_DR == 0x05) // 芯片擦除
{
command = 0;
SPI_sendchar(EraseChip);
}
} /* ====================================== */
/* =========== 【SPI】接收中断 ========== */
/* ====================================== */
#pragma vector=SPI_RXNE_vector
__interrupt void SPI_RXNE_IRQHandler(void)
{
//RxBuf[cnt++]=SPI_DR;
while(!(SPI_SR & 0x01));
UART1_sendchar(SPI_DR); if(count < 7 && command != 0) /* 地址+伪字节 < 7 并且 不是写使能、写禁止、芯片擦除进来的 */
{
if (command == 1) /* 执行页编程剩下的动作,先写24bit地址,然后给数据 */
{
if (count == 0) SPI_sendchar((testAddress & 0xFF0000) >> 16); // 【写】高位地址
else if(count == 1) SPI_sendchar((testAddress & 0xFF00) >> 8); // 【写】中间地址
else if(count == 2) SPI_sendchar(testAddress); // 【写】低位地址
else SPI_sendchar(0xaa); // 存入的数据
}
else if (command == 2) /* 执行读数据剩下的动作,先写24bit地址,然后给数据 */
{
if(count == 0) SPI_sendchar((testAddress & 0xFF0000) >> 16); // 【写】高位地址
else if(count == 1) SPI_sendchar((testAddress & 0xF000) >> 8); // 【写】中间地址
else if(count == 2) SPI_sendchar(testAddress); // 【写】低位地址
else SPI_sendchar(0xff); // 发送伪字节,制造时钟以便获得从机的数据
}
count++;
}
else /* count结束,或是写使能、写禁止、芯片擦除的复位 */
{
count = 0;
PC_ODR_ODR4 = 1; // 【/CS给高电平,等待下次命令给下降沿】
} }
循环7次,地址占3个字节,7 - 3 = 4,数据就占4个字节
这里我写入数据0xAA,四个数据就都是一样的了
这些数据保存在地址0x000000,这些东西都是写死的,要用时再根据自己的项目做修改就可以了
另外,一个地址可以理解为一个页面(page)
一样,在引脚图的上方介绍里,有一段英文『256-bytes per programmable page』
一个地址可以写256个字节,但我只用了4个哈
哦对了,上面的代码有用到几个定义的东西,我把它放在头文件了,这些也就是W25Q16相关的命令罢了
#define WriteEnable 0x06 // 写使能
#define WriteDisable 0x04 // 禁止写
#define WriteStatusRegister 0x01 // 写状态寄存器 #define ReadStatusRegister_1 0x05 // 读状态寄存器
#define ReadStatusRegister_2 0x35 // 读状态寄存器2 #define PageProgram 0x02 // 页编程
#define QuadPageProgram 0x32 #define EraseBlock64K 0xd8 // 块擦除(64KB)
#define EraseBlock32K 0x52 // 块擦除(32KB)
#define EraseSector4K 0x20 // 扇区擦除(4KB)
#define EraseChip 0xc7 // 芯片擦除
#define EraseChip2 0x60 // 已经有了一个,为什么还要另一个芯片擦除指令?
#define EraseSuspend 0x75
#define EraseResume 0x7a #define PowerDown 0xb9 // 掉电(可唤醒)
#define HighPerformanceMode 0xa3
#define ModeBitReset 0xff
#define ReleasePowerDownOrHPM 0xab // 掉电后可以释放掉电,然后器件会返回一个Device ID
#define Manufacturer 0x90 // 制造,芯片会返回器件ID
#define ReadUniqueID 0x4b
#define JEDEC_ID 0x9f #define ReadData 0x03
#define FastRead 0x0b // 快速读取
#define FaseReadDualOutput 0x3b // 快速读取(双输出)
#define FastReadDualIO 0xbb
#define FastReadQuadOutput 0x6b
#define FastReadQuadIO 0xeb
最后,这是读和写的代码,需要的可以下载:https://pan.baidu.com/s/1w9EZQNQDTY3SyT-B2D5L8g
提取码:kdsz
【STM8】外挂存储器W25Q16的更多相关文章
- 关于PADS的一些概念和实用技巧(一)
关于PADS的一些概念和实用技巧(一) 声明:引用请注明出处http://blog.csdn.net/lg1259156776/ 1. 关于part,CAE Decal,PCB Decal Part ...
- MCU与MPU的基本区别
MCU与MPU的基本区别 题记:一般来说,mpu的价格是mcu的数倍. 参考资料: http://www.elecfans.com/d/1564656.html https://zhuanlan.zh ...
- STM8单片机启动流程彻底探究--基于IAR开发环境
初学STM8会发现,STM8官方的固件库并没有提供一个.s文件的启动代码,那么她是如何启动然后跳转到main函数执行的呢 首先,我们根据ARM的只是可以推测,STM8也是通过复位向量来启动的,假设流程 ...
- stm8 iar开发
1.一份官方库基本是通用的. 2.尽量依托cubex for stm8 依托理由: 1.不同型号,不同后缀的芯片,将会被配置不同的外设.比如stm8s103k3系列可能有的是串口1,但是stm8s10 ...
- IAR FOR STM8 学习笔记 IAR工程的建立
STM8是ST意法半导体针对工业应用和消费电子开发而推出的8位单片机. 每种MCU都有自身的优点与缺点,与其它8-bit MCU相比,STM8 8-bit MCU最大的特点是: · 内核: o 最高f ...
- Genesis2000用c#开发外挂
先上官方的说明 gateway is a command line utility for sending messages and commands to Genesis processes. Th ...
- 谈谈计算机上的那些存储器-Memory Hierarchy
文章首发于浩瀚先森博客http://www.guohao1206.com/2016/12/07/1248.html 说到计算机上的存储器,很多人第一反应是硬盘,然后是内存. 其实在计算机上除了硬盘和内 ...
- STM8如何使用自带的bootloader
1,首先确认你使用的STM8有没有自带的bootloader.参考下表 2,STM8空器件可以直接使用自带的bootloader. 3,STM8在使用SWIM烧录后,要想继续使用自带的bootload ...
- APP切图标记PS的外挂神器-Assistor PS(转)
目前APP设计师们对Assistor PS 可是好评连连,说是切图仔的福音或救星.确实是这样的. 与其他切图标记软件不同的是,Assistor PS 是完全独立于 PS 本身的,说是一个外挂更加合适, ...
随机推荐
- 我的笔记本电脑瞬间扩大一个T的容量!
前言 不知道有多少人在家里搭建中央存储设备的,也就是NAS.这个东西在我日常生活中,存储了大量的个人资料,家人们的照片,技术的资料,还有各种高清影视剧.搭配公网的IP,可以真正做到,任何时候任何地点的 ...
- NSFOCUS建议您采取以下措施以降低威胁: * 修改源代码或者配置文件改变SSH服务的缺省banner。
老扫漏洞出来要整改 1.在 /etc/下创建一个文件 ssh_banner_change,在文件中输入内容,如:welcome! 2.修改/etc/ssh/sshd_config 文件,添加以下内容: ...
- 【死磕 NIO】— Proactor模式是什么?很牛逼吗?
大家好,我是大明哥. 上篇文章我们分析了高性能 IO模型Reactor模式,了解了什么是Reactor 模式以及它的三种常见的模式,这篇文章,大明再介绍另外一种高性能IO模型: Proactor. 为 ...
- Vue 之 Mixins (混入)的使用
是什么 混入 (mixins): 是一种分发 Vue 组件中可复用功能的非常灵活的方式.混入对象可以包含任意组件选项.当组件使用混入对象时,所有混入对象的选项将被合并到组件本身,也就是说父组件调用混入 ...
- shiro session返回问题
/** * 3.会话管理器 */ public DefaultWebSessionManager sessionManager() { CustomSessionManager sessionMana ...
- mysql 禁止外键检查
SET FOREIGN_KEY_CHECKS=0; SET FOREIGN_KEY_CHECKS=1; from: https://stackoverflow.com/a/15501754/80250 ...
- mybatis插入数据时处理为null的属性
在做项目的时候,数据库中的所有字段被设置为全都不能为null,但是在我们开发过程中,插入一些记录的时候,实体类中的一些字段如果页面没有传入,则默认就会被设置为null,这样的话,在执行插入语句的时候, ...
- 【jmeter学习】Concurrency Thread Group阶梯式加压测试
安装步骤 1.配置Concurrency Thread Group线程组 下载jmeter插件管理:https://jmeter-plugins.org/install/Install/ 2.配置插件 ...
- [loj539]旅游路线
考虑枚举加油的位置,当确定某次在第$i$个位置加油后,且下一次到$j$加油,那么$i$到$j$必然会选择不超过$c_{i}$条边且最长的路径,记作$d_{i,j}$ 如果能求出$d_{i,j}$,再设 ...
- [spojRNG]Random Number Generator
先将所有数加上Ri,即变为区间[0,2Ri],考虑容斥,将区间容斥为[0,+oo)-[2Ri,+oo),然后对[2Ri,+oo)令$bi=ai-2Ri$,相当于范围都是[0,+oo)问题转化为求n个正 ...