ORB-SLAM2初步--局部地图构建
一、局部地图构建简介
为什么叫“局部”地图构建,我的理解是这个线程的主要任务是像地图中插入关键帧(包括地图点等信息),以及需要进行LocalBA优化一个局部地图,这是相对于回环检测时进行的全局优化来说的,所以称为局部地图构建。而局部地图构建的主要任务就是上面说的,等待跟踪过程判断是否应该插入一个新的关键帧,并把关键帧插入到地图中,并对局部地图(跟踪过程中有一个局部地图跟踪)进行BA优化。具体细节包括三角化3D点,3D点的融合匹配,关键帧插入等。
二、局部地图构建逻辑分析
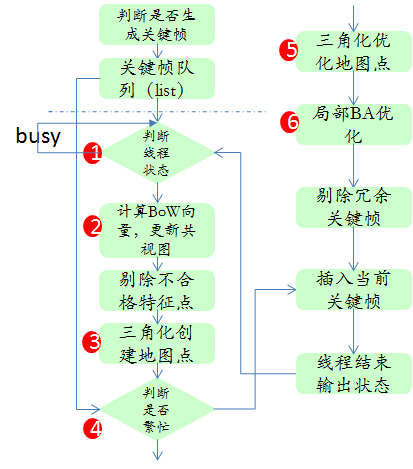
根据跟踪过程中的关键帧判定函数判断是否插入关键帧,生成一个关键帧队列,这个队列中都是待插入地图的关键帧;首先判断该线程是否正在执行插入关键帧的操作(上一个关键帧插入没有完成),然后计算当前关键帧的BoW向量、共视关系等信息并插入地图;每个关键帧都附带有特征点和描述符等信息(跟踪过程中使用到的),但是并不是所有的特征点都会成为3D地图点,因此需要剔除一些不合格的点,然后通过三角化创建地图点;接下来判断关键帧队列中是否仍有关键帧,如果没有(线程不是很忙)则进行3D点融合、LocalBA、冗余关键帧剔除等优化操作,而如果线程比较忙,则直接执行插入关键帧到闭环检测队列的操作(每一个关键帧都会判断是否遇到闭环);最后更改线程状态。
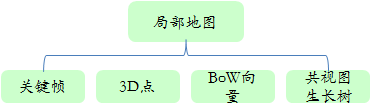
局部建图线程一开始看比较乱,但是只要弄清楚了地图中包含哪些信息(如上图所示)逻辑上还是比较清楚的,就是把当前关键帧(包括MapPoints,Features等信息)插入到地图中,并更新一下这个关键帧和其他关键帧之间的共视关系以及关键帧和地图点的观察关系等,但是有些地图点或关键帧经过判断之后显得多余或不合适(如这个关键帧的点几乎都能在其他关键帧上找到,或者这个关键帧上的点在其他关键帧上几乎找不到),就需要删除它,还有的3D点可能由于三角化误差的关系,本来是一个点,被三角化成了两个距离比较近的点,就需要进行融合等。
局部地图和前面的跟踪和后面的回环检测都有联系,关键帧是通过跟踪线程产生的,而局部地图进行LocalBA的条件是没有发现回环以及关键帧队列为空。这里地图包含的要素对保存和加载地图也是很有帮助的。
三、总结
相比跟踪过程,逻辑上比较简化,但是代码并不简单。分析关于局部地图的更新量对于地图的保存与加载也是很有帮助的,后面还会给出ORB-SLAM的地图保存与加载的分析。
ORB-SLAM2初步--局部地图构建的更多相关文章
- Slam(即时定位与地图构建) 知识篇
Slam即时定位与地图构建 技术解释 同步定位与地图构建(SLAM或Simultaneous localization and mapping)是一种概念:希望机器人从未知环境的未知地点出发,在运动过 ...
- ROS 八叉树地图构建 - 安装 octomap 和 octomap_server 建图包!
项目要用到八叉树库 Octomap 来构建地图,这里记录下安装.可视化,并启用带颜色的 Octomap 的过程. 一.Apt 安装 Octomap 库 如果你不需要修改源码,可以直接安装编译好的 oc ...
- 即时定位与地图构建SLAM(Simultaneous Localization and Mapping)
SLAM 即时定位与地图构建SLAM(Simultaneous Localization and Mapping) 参考链接: 视觉SLAM漫谈,http://www.cnblogs.com/gaox ...
- orb slam2 双目摄像头
主要参考了http://blog.csdn.net/awww797877/article/details/51171099这篇文章,其中需要添加的是:export ROS_PACKAGE_PATH=$ ...
- ORB SLAM2在Ubuntu 16.04上的运行配置
http://www.mamicode.com/info-detail-1773781.html 安装依赖 安装OpenGL 1. 安装opengl Library$sudo apt-get inst ...
- ROS中利用V-rep进行地图构建仿真
V-rep中显示激光扫描点 在VREP自带的场景中找到practicalPathPlanningDemo.ttt文件,删除场景中多余的物体只保留静态的地图.然后在Model browser→comp ...
- 关于ORB SLAM2资源整理(持续更新)
ORB SLAM2源码讲解(吴博) https://www.youtube.com/watch?v=2GVE7FTW7AU 泡泡机器人视频整理: http://space.bilibili.com/3 ...
- ROS 八叉树地图构建 - 使用 octomap_server 建图过程总结!
构建语义地图时,最开始用的是 octomap_server,后面换成了 semantic_slam: octomap_generator,不过还是整理下之前的学习笔记. 一.增量构建八叉树地图步骤 为 ...
- ROS 八叉树地图构建 - 给 octomap_server 增加半径滤波器!
为了在每帧点云中滤除噪声点,选择了半径滤波器,也用高斯滤波器测试过,但是没有半径效果好,这里记录下在 octomap_server 中增加半径滤波器的步骤,并在 launch 中配置滤波器参数. 一. ...
随机推荐
- Java多态的总结
多态 多态是一个对象具有不同表现形态或形式的能力,根据不同的实例执行不同的操作,例如打印机具有打印功能,打印机又有彩色打印机和黑白打印机,彩色打印机的实例打印出来的是彩色,黑白打印机打印出来的是黑色, ...
- LDAP认证
1.LDAP介绍 LDAP,(Light Directory Access Protocol),基于X.500标准的轻量级目录访问协议,类似于目录服务一样,是一个为查询浏览和搜索的数据库,优势在于他的 ...
- Repair Microsoft.VisualStudio.MinShell.Msi.Resources 2203 error And visual studio 2019 key
1. Go to the properties of "My computer" 2. Go to advanced settings of the system 3. Go to ...
- 关闭Chrome浏览器的广告
生活没有绝对的对与错:代码就不一样了,错了就编译不过,也正是因为这样,编程的人思维有时也会陷入一种狭隘中,这就是把工作和生活没有分开.Win10 右下角的广告就像程序调试中的"警告" ...
- 第04组 Beta冲刺(5/5)
队名:new game 组长博客 作业博客 组员情况 鲍子涵(队长) 过去两天完成了哪些任务 动画优化 接下来的计划 等待答辩 还剩下哪些任务 让游戏本体运行 遇到了哪些困难 时间太少了 有哪些收获和 ...
- event.stopPropagation()和event.preventDefault()
1.event.stopPropagation()方法 这是阻止事件的冒泡方法,不让事件向documen上蔓延,但是默认事件任然会执行,当你掉用这个方法的时候,如果点击一个连接,这个连接仍然会被打开, ...
- 抓包工具之fiddler实战1-基本设置
Fiddler概述 百度搜索fiddler能找到官网网站,百度软件中心也提供了下载,本人去下载了基本和官网的版本一致,但还是建议大家下载软件一定去官网进行下载. Fiddler是干什么的 在百度百科里 ...
- MongoDB创建集合和删除集合05-14学习笔记
MongoDB 是一个基于分布式文件存储的数据库.由 C++ 语言编写,是一个基于分布式文件存储的开源数据库系统.旨在为 WEB 应用提供可扩展的高性能数据存储解决方案. MongoDB 是一个介于关 ...
- Jmeter-Java请求实战
1.1. jmeter-java插件实现接口测试 (linux /mysql/rabbit-mq) 本次需要准备环境 Eclipse+jdk8 Jmeter Python 1.1.1. Rabbit- ...
- [IDA] 将连续的单个变量值修改为结构体
直接选中最上边的结构体,使用ALT+Q来进行修改.