SPI通讯(Serial Peripheral interface)
1. SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线:SCLK,MISO,MOSI,CS
2. SPI结构简图:

可以看出,SPI主从设备两端都有一个位移寄存器,数据在位移寄存器上通过逐位移动来实现同步双工通信,在主机发送数据的同时也会收到从机发来的数据。类似一个循环。(图片不好编辑,将就着看),需要注意的是传输过程是通过主机写入一个需要发送的数据来开始的。
如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。发送结束可以设置中断。
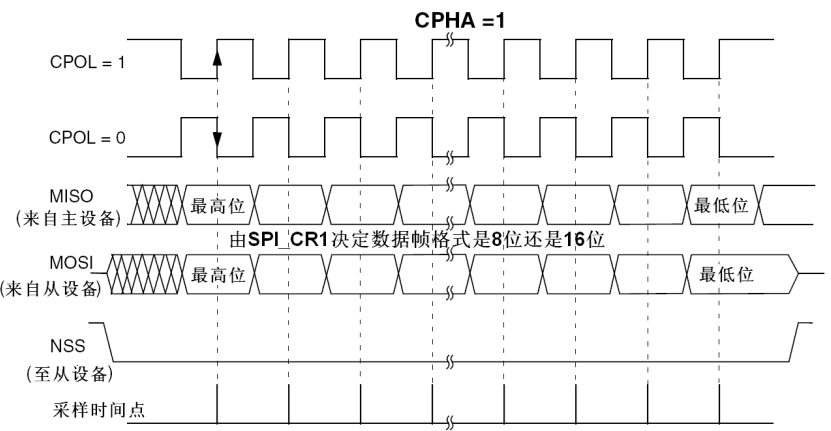
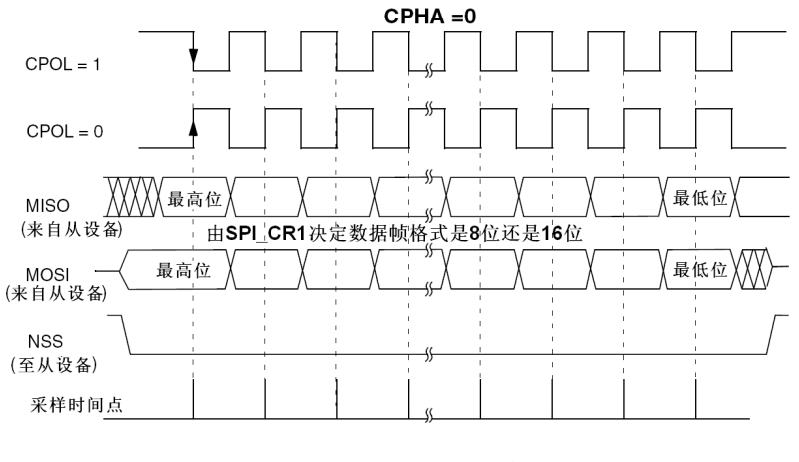
3. 时钟极性(POL)和相位(PHA),通过配置极性及相位为0或1,可配置成为4种不同的传输时序:极性为0,时钟空闲为低电平,反之为高;相位为0,据在第一个时钟跳变沿被采集,为1的话在第二个跳变沿被采集。如图:
4. SPI 时钟最多可以到 18Mhz,支持 DMA,可以配置为 SPI 协议或者 I2S (一种音频传输总线,集成电路内置音频总线)。
5. NSS引脚:主从模式选择,简单了解,用到时再具体了解。
7. 数据帧格式:可软件设置MSB或LSB哪个在先(SPI_CR1寄存器中LSBFIRST位),也可设置输入输出数据帧是8位或者16位(SPI_CR1寄存器DFF位)。
8. 状态标志位:① 发送缓冲器空闲标志(TXE),为1时表明发送缓冲为空,可写入数据,写入后自动置0;
② 接受缓冲器非空(RXNE),为1表示接收缓冲器中有有效接收数据,读数据自动置0;
③ Busy位,由硬件管理。
FlagStatus SPI_I2S_GetFlagStatus(SPI_TypeDef* SPIx, uint16_t SPI_I2S_FLAG);
void SPI_I2S_ClearFlag(SPI_TypeDef* SPIx, uint16_t SPI_I2S_FLAG);
ITStatus SPI_I2S_GetITStatus(SPI_TypeDef* SPIx, uint8_t SPI_I2S_IT);
void SPI_I2S_ClearITPendingBit(SPI_TypeDef* SPIx, uint8_t SPI_I2S_IT);
9. SPI中断:

10. 时钟配置最大为(Fpclk/2),这里的PCLK为PCLK1(SPI为APB1的外设),PCLK1最大为系统时钟的1/2。
(贴一个刚才百度的:SYSCLK 系统时钟,最大72MHzHCLK :AHB总线时钟,由系统时钟SYSCLK 分频得到,一般不分频,等于系统钟经过总线桥AHB--APB,通过设置分频,可由HCLK得到 PCLK1与PCLK2时钟不过PCLK2时钟最高可达72MHz,而PCLK1最大36MHz。PCLK2对应APB2外设。PCLK1对应APB1外设。)
下次整理一下关于时钟配置!!!
11. CRC校验(可配置中断):在发送模式下CRC位可被作为最后一个值发送;
全双工模式下对接收到的最后一个字节自动进行CRC校验。
12. SPI一般配置步骤:
配置相关引脚的复用功能,使能SPIx时钟。调用函数:void GPIO_Init();
初始化SPIx,设置SPIx工作模式。调用函数:void SPI_Init();
使能SPIx。调用函数:void SPI_Cmd();
SPI传输数据。调用函数:void SPI_I2S_SendData();uint16_t SPI_I2S_ReceiveData();
查看SPI传输状态。调用函数:SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE
13. 相关代码(以STM32F103x为例):
#include "spi.h" void SPI2_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure; RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );//PORTB时钟使能
RCC_APB1PeriphClockCmd( RCC_APB1Periph_SPI2, ENABLE );//SPI2时钟使能 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //PB13/14/15¸复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化 GPIO_SetBits(GPIOB,GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15); //PB13/14/15上拉 SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:双向双线全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式为主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI数据帧大小为8位
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //时钟空闲为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //时钟极性为1,第二个跳变沿采集数据
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由软件或者硬件管理,软件通过SSI位
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //定义波特率预分频值位256
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从最高位开始
SPI_InitStructure.SPI_CRCPolynomial = ; //CRC值计算的多项式,因该是说7位数据之后校验,标记下,我去找找再补回来
SPI_Init(SPI2, &SPI_InitStructure); //根据指定参数初始化SPI SPI_Cmd(SPI2, ENABLE); //使能SPI SPI2_ReadWriteByte(0xff);//启动传输发送0xff,可随意赋值 }
//SPI 速度设置函数
//SpeedSet:
//SPI_BaudRatePrescaler_2 2分频
//SPI_BaudRatePrescaler_8 8分频
//SPI_BaudRatePrescaler_16 16分频
//SPI_BaudRatePrescaler_256 256分频 void SPI2_SetSpeed(u8 SPI_BaudRatePrescaler)
{
assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler));
SPI2->CR1&=0XFFC7;
SPI2->CR1|=SPI_BaudRatePrescaler; //根据传入参数设置分频系数
SPI_Cmd(SPI2,ENABLE); } //SPIx 读写一个字节
//TxData:要写入的字节
//返回值:要读取的字节
u8 SPI2_ReadWriteByte(u8 TxData)
{
u8 retry=;
while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET) //检查发送缓冲器空标志位是否为1
{
retry++;
if(retry>)return ;
}
SPI_I2S_SendData(SPI2, TxData); //通过SPI2发送一个数据
retry=; while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE) == RESET) //检查接收缓存是否非空
{
retry++;
if(retry>)return ;
}
return SPI_I2S_ReceiveData(SPI2); //返回通过SPIx最近接收的数据
}
14. 好啦好啦,祝大家都能做个好梦~~~Goodnight....
SPI通讯(Serial Peripheral interface)的更多相关文章
- 理解AXI Quad Serial Peripheral Interface(SPI) IP核
reference : PG153-AXI Quad SPI v3.2 LogiCORE IP Product Guide.pdf 在使用MicroBlaze过程中,调用了此IP,所以有必须仔细学 ...
- SPI的学习和ESP8266的SPI通讯测试
SPI简介: SPI是串行外设接口(Serial Peripheral Interface)的缩写.SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时 ...
- Linux学习 :SPI通讯协议
SPI接口的全称是"Serial Peripheral Interface",意为串行外围接口,是Motorola首先在其MC68HCXX系列处理器上定义的.SPI接口主要应用在E ...
- SPI通讯协议
一.SPI概述 SPI,是英语Serial Peripheral Interface的缩写,顾名思义就是串行外围设备接口.SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线, ...
- 【Java实战】源码解析Java SPI(Service Provider Interface )机制原理
一.背景知识 在阅读开源框架源码时,发现许多框架都支持SPI(Service Provider Interface ),前面有篇文章JDBC对Driver的加载时应用了SPI,参考[Hibernate ...
- 【STM8】SPI通讯
这篇内容有点长,如果有人想透过我的博客学习STM8的SPI,那是我的荣幸 首先我要先说大纲,这样大家心里比较有底,可以把精力都用在SPI理解上 [SPI初步介绍]:介绍SPI如何接线.名称解释.通讯注 ...
- [Andorid] 通过JNI实现kernel与app进行spi通讯
CPU:RK3399 系统:Android 7.1 人脸识别的要求越来越高,因此主板增加了 SE 加密芯片,加密芯片通过 spi 接口与 CPU 通讯. 对于 kernel 层的代码,Linux 原始 ...
- LPC1768的SPI通讯
SPI是一种全双工串行接口,可处理多个连接到指定总线上的主机和从机.在数据传输过程中总线上只能有一个主机和一个从机通信.在数据传输中,主机总是会向从机发送一帧8到16个位的数据,而从机也总会向主机发送 ...
- STM32学习笔记——SPI串行通讯(向原子哥学习)
一.SPI 简介 SPI是 Serial Peripheral interface 的缩写,就是串行外围设备接口.SPI 接口主要应用在 EEPROM, FLASH,实时时钟,AD 转换器,还有数 ...
随机推荐
- 自用 goodsdetail
JSON.parse(data.parameter) 存的字符串 <select id="getGoodsBaseInfoById" resultType="co ...
- SOS.DLL在windbg里加载错误
sos.dll/mscordacwks.dll 公共语言运行库(CLR)是执行托管代码的Microsoft.NET框架的核心引擎.简单地说,它通过在托管程序集中使用中间语言和元数据,JIT按需编译代码 ...
- NLP算法工程师(实习生)面试总结(持续更新)
爱奇艺 1. attention<attention is all you need> 2. 相关项目 3. 逻辑回归 4. linux的指令(重命名文件,vim替换,vim指向文章最末行 ...
- 【POJ1068】Parencodings
题目传送门 本题知识点:模拟 这是一道恐怖的括号题.题意稍微理解以下还是可以的. 我们针对样例来理解一下 S.P.W 到底是什么意思: S:( ( ( ( ) ( ) ( ) ) ) ) P: \(P ...
- Mac版微信无法安装之始末
前言 Mac版微信安装不了...纠结了一周时间 ̄□ ̄||... 今天终于可以登录了(虽然还是没有安装到电脑上,但可以使用了) 因为之前也查了很多,有人遇到,但是没有可以解决我这个问题的方法, 浪费了很 ...
- Linux 上配置 SQL Server Always On Availability Group
SQL Server Always On Availability Group 配置步骤:配置三台 Linux 集群节点创建 Availability Group配置 Cluster Resource ...
- 项目启动tomcat失败的几种可能原因和解决方法
传送门:https://blog.csdn.net/u010565910/article/details/80411468 总结一下tomcat启动问题,也给自己做个笔记 , 逐渐补充完善. 1.ja ...
- js十大排序算法收藏
十大经典算法排序总结对比 转载自五分钟学算法&https://www.cnblogs.com/AlbertP/p/10847627.html 一张图概括: 主流排序算法概览 名词解释: n: ...
- 东站七雄保C位!论三线楼市网红板块的自我修养
不对!东站板块才是伍家岗的C位.这里有东站七雄! 前些天发了一篇城东C位之路的文章,居然引发了诸葛说房聊天群内大佬的激烈纷争.公说公有理婆说婆有理,一时争的是不可开交,大有约架之势.所以我决定提前写& ...
- AdaptIS: Adaptive Instance Selection Network
AdaptIS: Adaptive Instance Selection Network 2019-09-19 12:58:07 Paper: https://arxiv.org/pdf/1909.0 ...