目标检测 | 基于Weiler–Atherton算法的IoU求解
目标检测 | 基于Weiler–Atherton算法的IoU求解
IoU
交并比(Intersection over Union, IoU) 是计算机视觉领域中常用的一个评价指标,尤其在目标检测与图像分割任务中,用于衡量预测结果与真实标注之间的重合程度。
其定义如下:

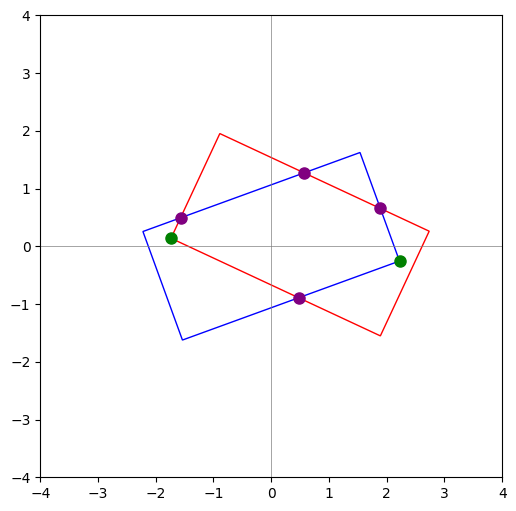
- 如图所示给定任意两个多边形框\(B_1, B_2\)(预测框与真实框),其 IoU 的计算公式为:
\]
其中\(|B_1 \cup B_2|\)为二者并集的面积,\(|B_1 \cap B_2|\)为二者交集的面积。
IoU的取值范围为\([0,1]\),当\(IoU=1\)时表示预测框与真实框完全一致;当\(IoU=0\)时表示预测框与真实框没有任何重叠;
通过评价\(IoU\)可以评估目标检测模型的性能
基于Weiler–Atherton算法的IoU求解
Bounding Box
在目标检测任务中,通常使用 包围盒(bounding box) 表示目标的矩形区域。根据任务需求的不同,包围盒可以分为以下几类:
轴对齐包围盒(Axis-Aligned Bounding Box,AABB)
轴对齐包围盒一般应用于2D的目标检测任务,四条边分别与x轴和y轴对齐,可以表达为:
\[B_\text{AABB} = (x_c, y_c, w, h),
\quad w > 0, \, h > 0
\]- 其中\((x_c,y_c)\)为中心坐标,\(w,h\)分别为包围盒的宽和高,也被称为外延(extent)
BEV包围盒(Bird’s Eye View Bounding Box,BEV Boudning Box)
BEV包围盒一般用于自动驾驶任务,在俯视图(BEV)中,每个物体除了位置和尺寸外,还包含一个航向角(yaw)表示方向,可以表达为:
\[B_\text{BEV} = (x_c, y_c, l, w, \theta),
\quad l > 0, \, w > 0, \, \theta \in [-\pi, \pi)
\]- 其中\((x_c,y_c)\)为中心坐标,\(l,w\)分别为包围盒的长和宽,\(\theta\)为全局坐标系的旋转角度
3D包围盒(3D Boudning Box)
3D包围盒在BEV包围盒的基础上增加了高度,也是自动驾驶任务中常用的表示格式
\[B_\text{3D} = (x_c, y_c, z_c, l,w,h, \theta),
\quad w, l, h > 0, \, \theta \in [-\pi, \pi)
\]- 其中\((x_c,y_c,z_c)\)为中心坐标,\(l,w,h\)分别为包围盒的长,宽和高,\(\theta\)为全局坐标系的旋转角度
在本文中,我们以 BEV 包围盒 为例,使用 Weiler–Atherton 算法求解 IoU。对于3D包围盒的 IoU 计算,可通过将 BEV 包围盒在俯视平面上的结果拓展到高度方向来实现。
Corner坐标转换
在计算之前,我们首先需要将多边形从包围盒表示转换为Corner坐标表示(四个顶点的坐标),这个过程可以分为三步,首先给定一个包围盒:
\quad l > 0, \, w > 0, \, \theta \in [-\pi, \pi)
\]
计算局部坐标系下的四个角点
\begin{bmatrix}
+\frac{l}{2} & +\frac{w}{2} \\
+\frac{l}{2} & -\frac{w}{2} \\
-\frac{l}{2} & -\frac{w}{2} \\
-\frac{l}{2} & +\frac{w}{2}
\end{bmatrix} \in \mathbb{R}^{4\times 2}
\]
绕中心旋转矩阵
\]
其中:
\begin{bmatrix}
\cos\theta & -\sin\theta \\
\sin\theta & \cos\theta
\end{bmatrix}
\]
平移到全局坐标系
\begin{bmatrix} x_c & y_c \\ x_c & y_c \\ x_c & y_c \\ x_c & y_c \end{bmatrix}
\]
将上述的三个过程合并为齐次坐标系矩阵:
x_1 & y_1 & 1 \\
x_2 & y_2 & 1 \\
x_3 & y_3 & 1 \\
x_4 & y_4 & 1
\end{bmatrix} =
\begin{bmatrix}
+ \frac{l}{2} & + \frac{w}{2} & 1 \\
+ \frac{l}{2} & - \frac{w}{2} & 1 \\
- \frac{l}{2} & - \frac{w}{2} & 1 \\
- \frac{l}{2} & + \frac{w}{2} & 1
\end{bmatrix}
\cdot
\begin{bmatrix}
\cos\theta & \sin\theta & x_c \\
-\sin\theta & \cos\theta & y_c \\
0 & 0 & 1
\end{bmatrix}
\]
Weiler–Atherton算法
Weiler–Atherton算法是一种计算任意两个非凹图形交集的算法,可以被分为四个步骤:
- 求解所有相交点
- 求解所有被包围的顶点
- 将相交点和被包围的顶点放入一个数组中,按照逆时针进行排序
- 按照顺序连接为新的多边形求解其面积
给定任意两个包围盒的Cornor坐标表示\(B_1,B_2\in\mathbb{R}^{4 \times 2}\)

计算所有相交点
给定任意两条线段\(L_1=(x_1,y_1),L_2=(x_2,y_2)\)与\(M_1=(x_3,y_3),M_2=(x_4,y_4)\),我们可以如下求出其交点:
定义\(r=L_2-L_1,s=M_2-M_1\),有:
\]
其中\(\times\)为二维向量叉乘,定义如下:
\]
那么线段\(P,Q\)的交点为:
\begin{cases}
L_1 + t r, &
\text{if } r\times s \neq 0 \text{ and } t \in [0,1], u \in [0,1] \\[1ex]
\text{无交点}, & \text{otherwise}
\end{cases}
\]
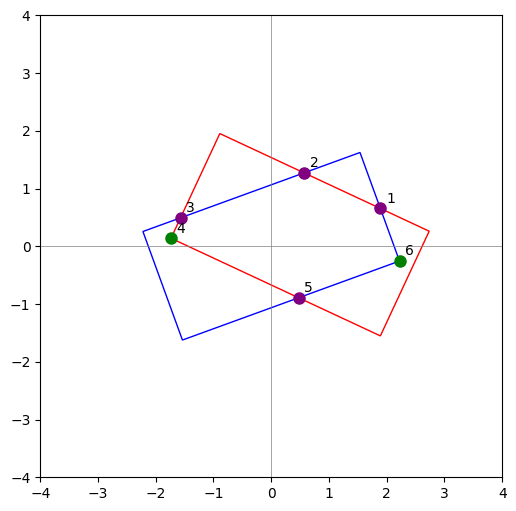
通过线段相交算法我们可以求出任意两个线段之间的交点(如图所示的紫色点)

计算所有被对方包围起来的顶点
给定任意一个包围盒\(B\in\mathbb{R}^{4 \times 2}\)与点\(P\),我们可以通过如下过程求解点\(P\)是否在包围盒\(B\)中:
定义\(P_a=B[0, :],P_b=B[1, :],P_d=B[3, :]\)
求得:
\]
其中\(AB=P_b-P_a,\ AD=P_d-P_a,\ AP = P-P_a\)
如图所示,当\(t\in[0,1]\and u\in[0,1]\)时,点\(P\)位于包围盒中\(B\)

通过上述流程我们可以求解所有在对方包围盒的顶点(如图所示的绿色点)
顶点极角排序
为了方便连接每个顶点,接下来我们将所有顶点按照极坐标系下的角度进行排序,给定任意两点\(P_1(x_1,y_1)\)与\(P_2(x_2,y_2)\),有比较函数如下:
\begin{cases}
\text{true}, & \Theta_{P_1} < \Theta_{P_2} \\[0.5em]
\text{false}, & \Theta_{P_1} \geq \Theta_{P_2} \\[0.5em]
\end{cases}
\]
其中
\begin{cases}
\arctan2(y, x), & \arctan2(y, x) \ge 0 \\
\arctan2(y, x) + 2\pi, & \arctan2(y, x) < 0
\end{cases}
\]
但是\(\arctan2\)这个操作非常消耗资源,所以我们不会直接计算极角$\theta $,我们会进行如下优化:
给定极坐标系的坐标$(r,\theta) \(,我们可以构建一个关于\)\theta\(的函数\)g(\theta)=|\cos\theta|\cos\theta$,这个函数会在第一,二象限递减,第三,四象限递增,接下来有:
g(\theta) & = \frac{r^2}{r^2} \, g(\theta) \\
& =\frac{r^2 \, |\cos\theta| \cos\theta}{r^2}\\
& =\frac{|r \cos\theta| \cdot (r \cos\theta)}{r^2} \\
\end{align}
\]
其中我们将极坐标系公式代入原式:
\]
得到:
g(\theta) &=\frac{|r \cos\theta| \cdot (r \cos\theta)}{r^2} \\
&=\frac{|x|\cdot x}{x^2+y^2}
\end{align}
\]
在实际计算中为了防止除0我们会在分母加上一个非常小的数\(\varepsilon\):
\]
我们可以给出优化版本的比较函数\(\text{cmp}(\cdot,\cdot)\):
\begin{cases}
\text{false}, & (x_1,y_1) = (x_2,y_2) \\[0.5em]
\text{true}, & y_1 > 0,\, y_2 < 0 \\[0.5em]
\text{false}, & y_1 < 0,\, y_2 > 0 \\[0.5em]
\text{true}, & y_1 > 0,\, y_2 > 0,\, g(\theta_1) > g(\theta_2) \\[0.5em]
\text{true}, & y_1 < 0,\, y_2 < 0,\, g(\theta_1) < g(\theta_2) \\[0.5em]
\end{cases}
\text{其中 }
g(\theta) = \frac{|x|\cdot x}{x^2+y^2+\varepsilon}
\]
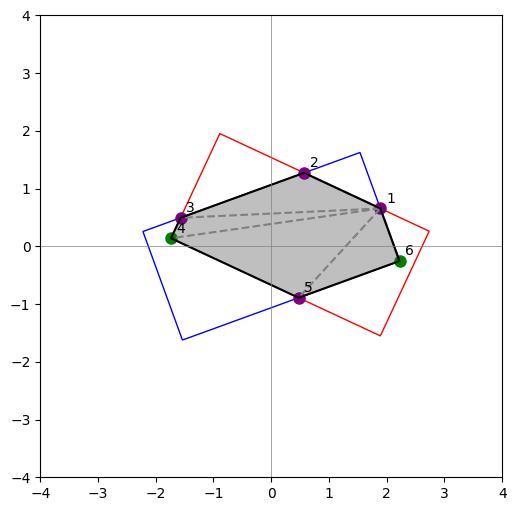
形成新的多边形并计算面积
给定任意二维向量\(L=(x_1,y_1),M=(x_2,y_2)\),我们可以求解二者共同起点所构成的三角形面积\(S_{LM}\):
\]
给定已经按照极角进行排序的点集\(\{P_1,\dots,P_n|n\leq8\}\),我们可以将这些点按照顺序连接为一个闭合的多边形\(I\),这个多边形由\(n-2\)个三角形所组成,每个三角形\(S_n\)的面积为\(S_n=\frac{1}{2}|(P_{n+1}-P_1)\times (P_{n+2}-P_1)|\),那么我们可以算出这个多边形的面积:
\]

计算IoU
上文我们已经得到BEV包围盒\(B_1\)与\(B_2\)的交集面积为\(S_I\),那么我们可以如下算得\(IoU\):
\]
如果\(B_1,B_2\)为3D包围盒,可以如下增加一个高度项:
\]
其中
H_I=&\max(0,\min(z_{B_1}+\frac{h_{B_1}}{2}, z_{B_1}+\frac{h_{B_2}}{2})-\max(z_{B_1}-\frac{h_{B_1}}{2},z_{B_2}-\frac{h_{B_2}}{2}))\\H_U=&h_{B_1}+h_{B_2}-H_I
\end{align}
\]
参考文献
https://en.wikipedia.org/wiki/Weiler–Atherton_clipping_algorithm
https://github.com/lilanxiao/Rotated_IoU
目标检测 | 基于Weiler–Atherton算法的IoU求解的更多相关文章
- CVPR目标检测与实例分割算法解析:FCOS(2019),Mask R-CNN(2019),PolarMask(2020)
CVPR目标检测与实例分割算法解析:FCOS(2019),Mask R-CNN(2019),PolarMask(2020)1. 目标检测:FCOS(CVPR 2019)目标检测算法FCOS(FCOS: ...
- 评价目标检测(object detection)模型的参数:IOU,AP,mAP
首先我们为什么要使用这些呢? 举个简单的例子,假设我们图像里面只有1个目标,但是定位出来10个框,1个正确的,9个错误的,那么你要按(识别出来的正确的目标/总的正确目标)来算,正确率100%,但是其实 ...
- 目标检测-基于Pytorch实现Yolov3(1)- 搭建模型
原文地址:https://www.cnblogs.com/jacklu/p/9853599.html 本人前段时间在T厂做了目标检测的项目,对一些目标检测框架也有了一定理解.其中Yolov3速度非常快 ...
- 【目标检测】Faster RCNN算法详解
Ren, Shaoqing, et al. “Faster R-CNN: Towards real-time object detection with region proposal network ...
- 异常检测-基于孤立森林算法Isolation-based Anomaly Detection-1-论文学习
论文http://202.119.32.195/cache/10/03/cs.nju.edu.cn/da2d9bef3c4fd7d2d8c33947231d9708/tkdd11.pdf 1. INT ...
- 异常检测-基于孤立森林算法Isolation-based Anomaly Detection-2-实现
参考https://scikit-learn.org/stable/modules/generated/sklearn.ensemble.IsolationForest.html#sklearn.en ...
- 异常检测-基于孤立森林算法Isolation-based Anomaly Detection-3-例子
参考:https://scikit-learn.org/stable/auto_examples/ensemble/plot_isolation_forest.html#sphx-glr-auto-e ...
- 第三十一节,目标检测算法之 Faster R-CNN算法详解
Ren, Shaoqing, et al. “Faster R-CNN: Towards real-time object detection with region proposal network ...
- CVPR2019目标检测方法进展综述
CVPR2019目标检测方法进展综述 置顶 2019年03月20日 14:14:04 SIGAI_csdn 阅读数 5869更多 分类专栏: 机器学习 人工智能 AI SIGAI 版权声明:本文为 ...
- CVPR2019目标检测论文看点:并域上的广义交
CVPR2019目标检测论文看点:并域上的广义交 Generalized Intersection over Union Generalized Intersection over Union: A ...
随机推荐
- java面向对象(this、static)
this关键字 表示类中的属性和方法 调用本类中的构造方法 表示当前对象. 代码 public class text01_1 { public static void main(String[] ar ...
- AtCoder Beginner Contest 184 ABCDE 题解
A - Determinant 签到. B - Quizzes 签到. C - Super Ryuma 贪心,同时分情况讨论: 1.本身就在范围里面,就1次(特判起始点和终点重合). 2.在两步范围内 ...
- java 图像显示
简介 java 核心编程 code /* * @Author: your name * @Date: 2020-10-28 22:38:26 * @LastEditTime: 2020-10-28 2 ...
- SciTech-System Theory-系统论:目标导向驱动+自适应动态调整+内外部双向良性循环机制:矛盾统一理论与实践,质与量,外部与内部,静态与动态,常态与异态,整体与局部, 共性与个性的需要。
<<工程系统论, ISBN:9787030199294, 科学出版社, 李喜先等 著>> <<系统论, ISBN:9787510011894, 系统科学哲学--中国 ...
- redis可视化客户端工具有哪些,怎么选择
项目现在使用到的redis数据类型越来越复杂,已经不是简单的string类型了,有用到list和hash这些类型,假如还是需要使用命令工具敲命令,就太麻烦了.而且这些命令不好记,容易出错. 因此,越来 ...
- Win10专业版无线网络老是掉线的问题
有一位电脑基地的用户,使用win10专业版系统笔记本电脑的时候,总是出现无线网卡掉线的问题,这该怎么办呢?接下来,技术员小编就来分享具体的解决方法. Win10 专业版下无线总是掉线,可能是由电源管理 ...
- unity代码编译时间分析工具
https://github.com/needle-tools/compilation-visualizer 工具2 Editor Iteration Profiler (EIP) 地址: https ...
- 告别堡垒机时代!某电力公司如何用CloudQuery解决2000+数据库的安全困局?
" 在数字化浪潮席卷能源行业的今天,作为国家电网信息化建设的排头兵,某大型电力公司面临着甜蜜的烦恼:核心业务数据量爆发式增长,而数据库安全管理却成了一道难题.传统通过堡垒机管理数据库访问的方 ...
- Apereo CAS 4.1 反序列化命令执行漏洞 (复现)
此漏洞需要用到工具Apereo-CAS-Attack,工具地址:https://github.com/vulhub/Apereo-CAS-Attack 还需要下载结合https://github.co ...
- 基于vLLM与AWS Trainium的冷启动推荐优化
冷启动问题的本质 推荐系统中的冷启动不仅涉及新用户或新物品问题,更核心的是系统初始化阶段完全缺乏个性化信号.当新用户首次访问或新内容上线时,由于缺乏行为历史数据,系统只能提供泛化推荐,导致点击率和转化 ...