Tensorflow/Keras、Pytorch 杂记
Tensorflow/Keras
直接从文件生成图片数据
ImageDataGenerator,循环生成图片,在重复生成图片之前,会把所有图片都遍历一遍。而且如果图片总量不是生成批量的倍数的话,在生成重复图片的前一次的批量是不完整的。具体代码:
import tensorflow as tf
from tensorflow import keras
from tensorflow.keras.preprocessing.image import ImageDataGenerator
import matplotlib.pyplot as plt datagen = ImageDataGenerator( #定义生成图片的模式,添加各种变换等,都是在范围内随机
rotation_range=40, #图片旋转的范围
width_shift_range=0.2, #图片水平位移的范围
height_shift_range=0.2, #图片垂直位移的范围
shear_range=0.2, #图片变倾斜的角度
zoom_range=0.2, #图片缩放的范围
horizontal_flip=True, #50%几率水平镜像
fill_mode='nearest')
gener = datagen.flow_from_directory( #图片数据生成器
'D:/Datasets/dogs-vs-cats/train/test', #生成路径。这个文件夹中应该包括各个类别的图片,且每类图片保存在单独的文件夹中
target_size = (150,150), #生成图片的尺寸
batch_size=1, #每次生成多少图片数据
class_mode='binary') #生成图片的标签格式,这里只有两类,所以为二元标签,一个标量0或1
for i,j in gener:#生成的是:图片,标签
i/=255.
print(j)
plt.imshow(i[0])
plt.show()
序列长度统一化
pad_sequences,将array中长度不一的list类型的序列转换为长度相同的array。代码示例:
from tensorflow.keras.datasets import imdb
from tensorflow.keras.preprocessing.sequence import pad_sequences max_feature = 10000
max_len = 500
(data_train,y_train),(data_test,y_test) = imdb.load_data(num_words=max_feature) x_train = pad_sequences(data_train,maxlen=max_len)
x_test = pad_sequences(data_test,maxlen=max_len)
自定义数据生成器
A detailed example of data generators with Keras
使用数据生成器(data generators)解决训练数据内存问题
CNN显示层输出
from keras import models
使用
activation_model = models.Model( inputs = model.input, outputs = model_outputs)
来对原模型生成模型,生成的模型预测样本时能输出原模型对应层的计算结果。model.input是原模型model的输入层,model_outputs是这个模型的某些层,可以使用如:
model_outputs = [l.output for l in model.layers] #返回了原模型的所有层的输出
来定义。然后
activation = activation_model.predict(a_input)
获取某个输入的对应各个层的输出。
CNN显示层过滤器的效果
查看过滤器训练完成后产生的效果,可以使用该层输出的均值关于输入的梯度来梯度下降,迭代输入的随机图片,使这个均值极小化,然后迭代完成后的图片就是过滤器的效果。具体代码:
#%%
import tensorflow as tf
import keras
import matplotlib.pyplot as plt
import numpy as np
from tensorflow.keras.models import load_model
from keras import backend as K #%%绘制层过滤器
def produce_img(x):
x -= x.mean()
x /= x.std()+1e-5
x = (x*0.1)+0.5
x = np.clip(x,0,1)
x *= 255
x = np.clip(x,0,255).astype('uint8')
return x
def show_filter(model0,layer_name, filter_index,input_size):
'''model0要看过滤器的模型,layer_index待查看过滤器的层序号,filter_index要查看的过滤器序号
实现的操作主要是keras后端的特性,使用python函数来定义keras函数
'''
layer_output = model0.get_layer(layer_name).output #获取某层输出
loss = K.mean(layer_output[:,:,:,filter_index]) #输出的均值作为梯度下降的损失
grads = K.gradients(loss,model0.input)[0] #计算损失关于输入的梯度,这里仅为函数的定义,并没有计算,后面传入input才开始计算
grads /= K.sqrt(K.mean(K.square(grads)))+1e-5 #梯度标准化
iterate = K.function([model0.input],[loss,grads]) #定义产生梯度和损失的函数,也就是说,输入是model0的输入,输出是上面定义的loss和grads。
#这是keras后端自带的定义函数的函数 input_img = np.random.random((1,input_size,input_size,3))*20+128. #随机一个噪音图片用来迭代
step = 1.0
for i in range(40):
loss_value, grads_value = iterate([input_img])
input_img += grads_value*step
return produce_img(input_img)[0] #%%以下是显示代码
from keras.applications import VGG16
input_size = 150
model = VGG16(weights='imagenet',include_top = False) #获取模型
model.summary() #查看一下模型各层
max_layer = 4 #要显示的最大层
raw = 8 #图片显示的行数
col = 8 #图片显示的列数
for k in range(max_layer):
show_pic = np.zeros([raw*(input_size+5),col*(input_size+5),3])
for i in range(raw):
for j in range(col):
print('block'+str(k+1)+'_conv'+str(1))
print(i,j)
show_pic[
i*(input_size+5):i*(input_size+5)+input_size,
j*(input_size+5):j*(input_size+5)+input_size,:] = show_filter(model,'block'+str(k+1)+'_conv'+str(1), i*col+j,input_size)
show_pic/=255
plt.imshow(show_pic)
plt.show()
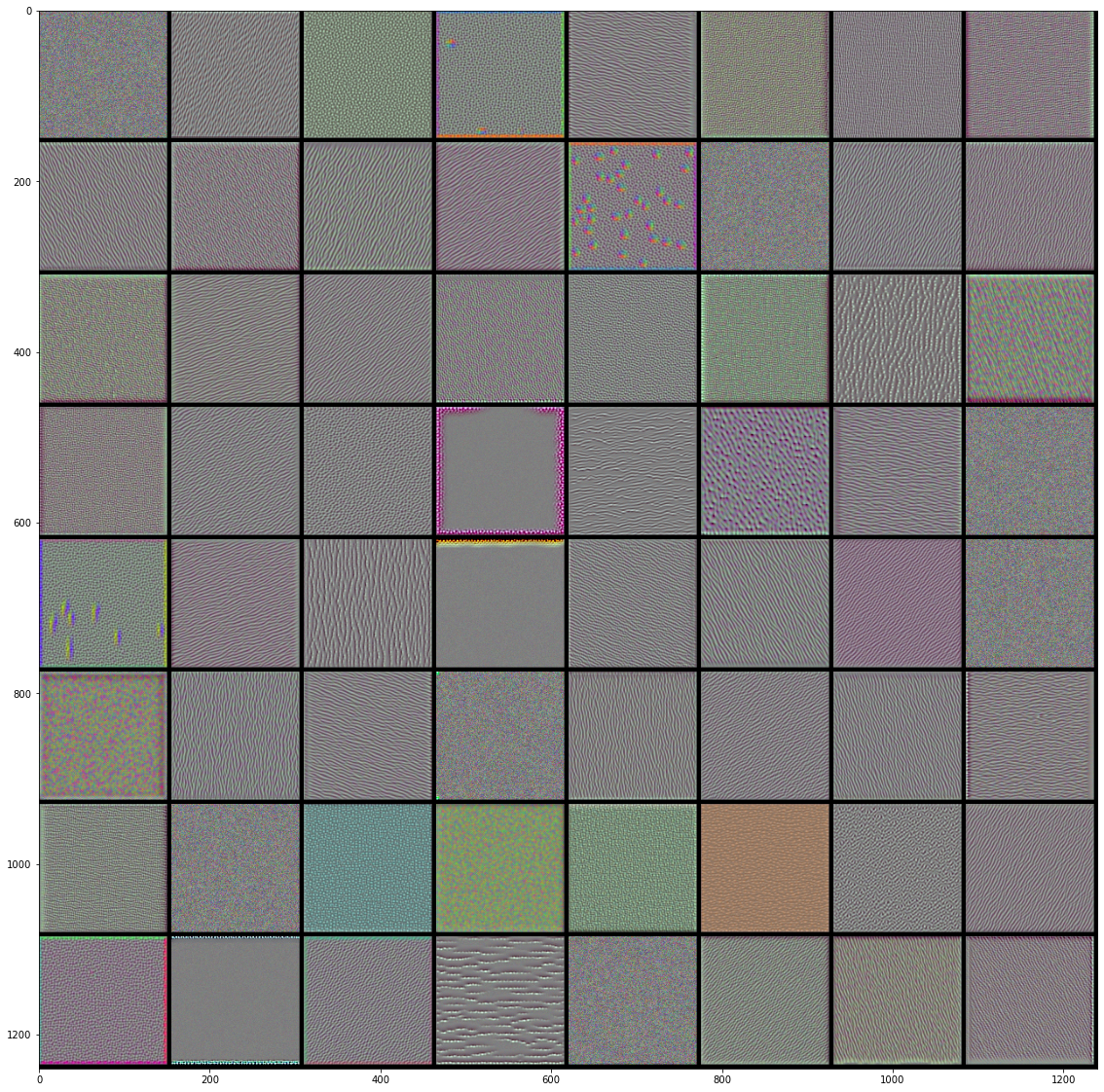
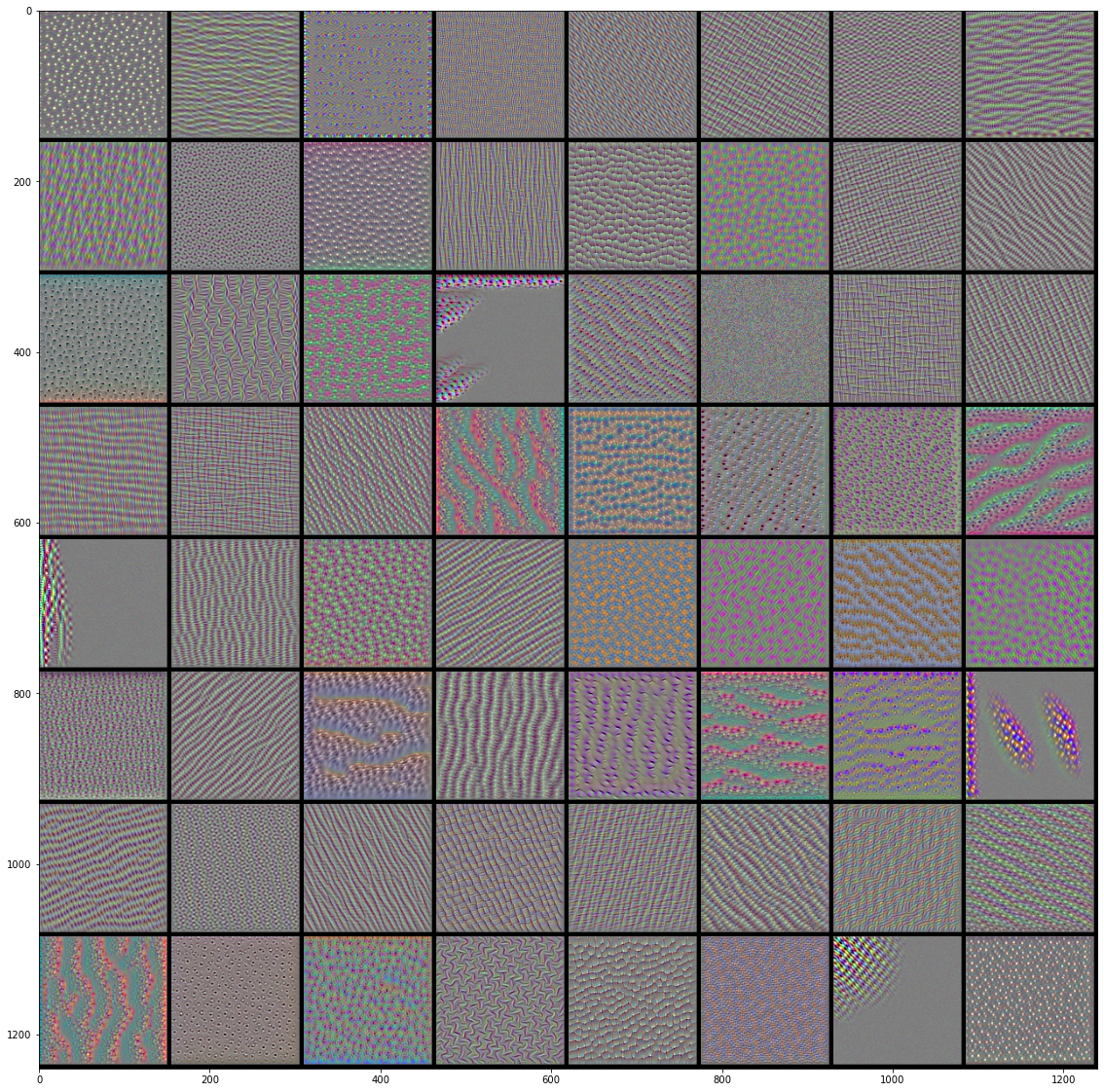
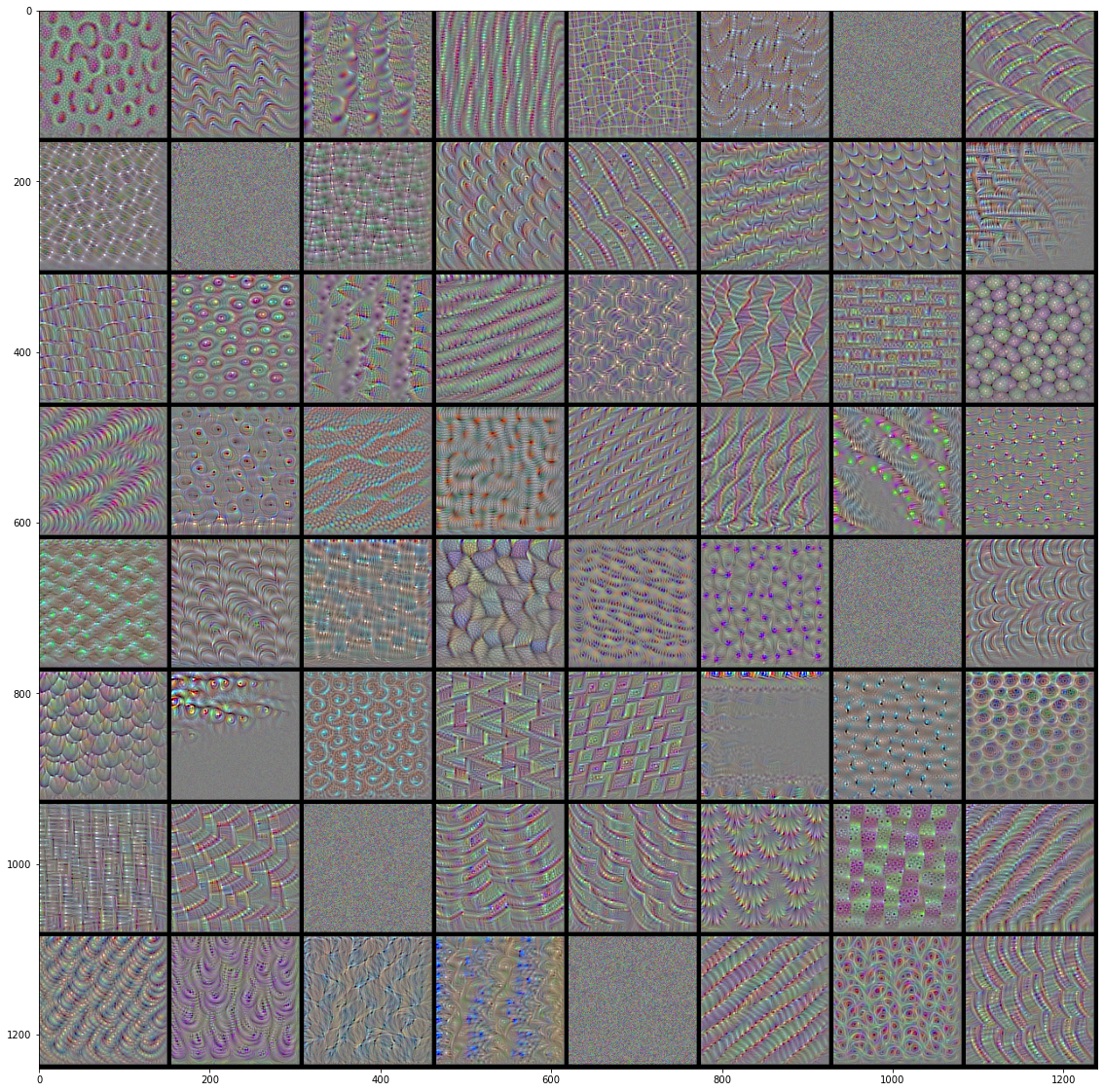
VGG16前4层的前64个过滤器的效果图:
 |
 |
 |
 |
注意!tensorflow在2.0版本之后,默认模式为eager模式,也就是动态图模式(可以直接获取值而不用在迭代中才能获得),而不是之前的静态图模式(计算图完全建立好以后才能开始迭代计算)。在eager模式下不能直接获取梯度加入计算图,会报错,所以要先退出eager模式才能执行上面的代码。也就是在所有tf代码之前加上兼容1.x版本的代码来禁止eager模式(我奇怪禁止eager模式而已为什么要放在兼容性代码里面):
tf.compat.v1.disable_eager_execution()
多输出与多输入的梯度
Tensorflow求梯度函数很灵活,对于有多维输入与多维输出(输入与输出都可以是包含多个张量的列表)的张量流,梯度函数会输出所有输入的梯度列表。列表中每个输入的梯度是将输出列表中所有输出元素相加后再对应求得的,因此不必担心会有遗漏。示例如下:
import tensorflow as tf input1 = tf.Variable([3.,4])
input2 = tf.Variable([9.,5])
w1_1 = tf.constant([[1.,2],[3,4]])
w1_2 = tf.constant([[5.,6],[7,8]])
w2 = tf.constant([[5.,6],[7,8]])
with tf.GradientTape() as tape:
output1_1 = tf.tensordot(input1, w1_1, axes = 1)
output1_2 = tf.tensordot(input1, w1_2, axes = 1)
output2 = tf.tensordot(input2, w2, axes = 1)
grads = tape.gradient([output1_1,output1_2,output2],[input1,input2])
print("Input1: "+str(input1.numpy()))
print("Weight1_1:\n",w1_1.numpy())
print("Weight1_2:\n",w1_2.numpy())
print("Output1: "+str(output1_1.numpy()))
print("Output2: "+str(output1_2.numpy()))
print("Input1的梯度: "+str(grads[0].numpy())) print("\nInput2: "+str(input2.numpy()))
print("Weight2:\n",w2.numpy())
print("Output2: "+str(output2.numpy()))
print("Input2的梯度: "+str(grads[1].numpy()))
输出如下:
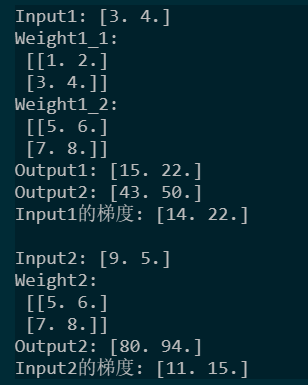
Input1的梯度中:
14 = 1+2+5+6
22 = 3+4+7+8
但是,需要注意的是,对于多输出且输出规模不同的某个输入来说,直接默认让TF对输出元素进行简单求和可能会出现权重不均的问题。比如输出a为$[None,1]$,输出b为$[None,100]$。如果我们不对这两个输出进行别的操作的话,TF会把它们的所有元素都加在一起再求梯度,这会导致输出a相对于输出b的权重比是$1:100$,梯度下降时就可能会出现a的loss不降反增的情况。你可以想象一下,b只要让所有元素各变小一点点,就能将抵消a巨大的增加,结果总体的损失依然是下降的,也就是说a的话语权在其中是很小的。为了防止这种情况,我们最好让a和b都通过tf.reduce_mean()求平均值,然后再相加,这样就让二者的权重相等了。
当然,以上描述的是在多输出有共享模型参数的情况下,如果所有输出都是输入通过不同的权重求得的,也就是说这些输出都是独立运算的,那么对简单相加得到的损失进行的梯度下降依然会使每个部分的损失都减小。
Pytorch
负值取对数的梯度
对于添加了对数的loss,如果在取对数之前为负值,loss值为nan,但是依然可以反向传播,反向传播的导数是这个负值的倒数。验证代码如下:
import numpy as np
import torch
from torch import optim
import matplotlib.pyplot as plt whis = []
wghis = []
for i in np.arange(0.1,10.,0.001):
w = torch.tensor(-i,requires_grad=True)
torch.log(w).backward()
# print(w,w.grad)
whis.append(w.detach().cpu())
wghis.append(w.grad.detach().cpu())
whis, wghis = np.array(whis), np.array(wghis)
print(wghis)
plt.plot(whis,wghis)
plt.plot(-whis,1/whis)
plt.show()
画出示意图如下:

左边是负值对数的导函数,右边是函数$y = -1/x$,形状镜像一致。
对模型不同层施加不同学习率
模型各层的参数可以以字典的形式传入,在字典中修改各个参数的优化超参数,比如学习率、动量等等。示例代码如下:
1 #%%
2 from torch import nn,optim
3
4 class test(nn.Module):
5 def __init__(self):
6 super().__init__()
7 self.layer1 = nn.Linear(1,2)
8 self.layer2 = nn.Linear(2,3)
9 self.layer3 = nn.Linear(3,1)
10 self.layer4 = nn.Linear(1,3)
11 paras = [
12 {'params':self.layer1.parameters(),'lr':111,'momentum':0.2},
13 {'params':self.layer2.parameters(),'lr':222},
14 {'params':self.layer3.parameters()},
15 {'params':self.layer4.parameters()},
16 ]
17 opt = optim.SGD(paras,10) #没在字典中定义的将在这里统一定义
18 for i in opt.param_groups:
19 print(i)
20 print('\n')
21
22 model = test()
打乱数据集
尽管是很简单的操作,然而pytorch没给实现。可以用numpy的shuffle来打乱序号,然后用这个乱的序号对torch.tensor重新索引,示例代码如下:
import torch
import numpy as np a = torch.tensor([1,2,3,4,5])
r = np.array(range(len(a)))
np.random.shuffle(r)
a = a[r]
print(a)
需要注意的是,np.random.shuffle并不返回值,它对变量本身进行操作。
优化器实现的不同
Pytorch优化器动量(Momentum)的实现和一些早期论文中描述的不同,pytorch的动量是这样实现的:
\begin{aligned} v_{t+1} & = m v_{t} + g_{t+1}, \\ p_{t+1} & = p_{t} - l v_{t+1}, \end{aligned}
其中$v,m,l,g,p$分别表示速度、动量参数、学习率、梯度、参数权重值。而早期论文通常是这样实现的:
\begin{aligned} v_{t+1} & = m v_{t} + lg_{t+1}, \\ p_{t+1} & = p_{t} - v_{t+1}, \end{aligned}
如果有实验结果上的不同,问题可能出现在这里。
数据的重复
Pytorch中如果要显式广播一个数据,可以用expand或repeat,repeat会对数据本身进行复制,expand则是对数据的索引进行复制,因此repeat会比expand慢。如果你想在广播后,对一个值的修改会同时修改相应的其它广播值,则用expand,否则用repeat。另外,梯度的传播则是相同的。
根据以上介绍,我们可以知道,同时对expand的广播值进行不同的操作会出错。实验如下:
import torch img = torch.zeros([1])
ex_img = img.expand([2])
ex_img += torch.tensor([100,100])
广播后的两个值指向同一个数据,因此同时给它们做加法是不行的。
Tensorflow/Keras、Pytorch 杂记的更多相关文章
- Ubuntu16.04深度学习基本环境搭建,tensorflow , keras , pytorch , cuda
Ubuntu16.04深度学习基本环境搭建,tensorflow , keras , pytorch , cuda Ubuntu16.04安装 参考https://blog.csdn.net/flyy ...
- 常用深度学习框——Caffe/ TensorFlow / Keras/ PyTorch/MXNet
常用深度学习框--Caffe/ TensorFlow / Keras/ PyTorch/MXNet 一.概述 近几年来,深度学习的研究和应用的热潮持续高涨,各种开源深度学习框架层出不穷,包括Tenso ...
- [转] 理解CheckPoint及其在Tensorflow & Keras & Pytorch中的使用
作者用游戏的暂停与继续聊明白了checkpoint的作用,在三种主流框架中演示实际使用场景,手动点赞. 转自:https://blog.floydhub.com/checkpointing-tutor ...
- 分别基于TensorFlow、PyTorch、Keras的深度学习动手练习项目
×下面资源个人全都跑了一遍,不会出现仅是字符而无法运行的状况,运行环境: Geoffrey Hinton在多次访谈中讲到深度学习研究人员不要仅仅只停留在理论上,要多编程.个人在学习中也体会到单单的看理 ...
- Tensorflow、Pytorch、Keras的多GPU使用
Tensorflow.Pytorch.Keras的多GPU的并行操作 方法一 :使用深度学习工具提供的 API指定 1.1 Tesorflow tensroflow指定GPU的多卡并行的时候,也是可以 ...
- [开发技巧]·TensorFlow&Keras GPU使用技巧
[开发技巧]·TensorFlow&Keras GPU使用技巧 1.问题描述 在使用TensorFlow&Keras通过GPU进行加速训练时,有时在训练一个任务的时候需要去测试结果 ...
- Tensorflow视频教程&Pytorch视频教程
基于tensorflow做研究和基于pytorch做研究哪个好?哪个更容易复制代码,工业上更易用.Keras和tensorflow.pytorch的关系. Keras:Keras是一个由Python编 ...
- mnist手写数字识别——深度学习入门项目(tensorflow+keras+Sequential模型)
前言 今天记录一下深度学习的另外一个入门项目——<mnist数据集手写数字识别>,这是一个入门必备的学习案例,主要使用了tensorflow下的keras网络结构的Sequential模型 ...
- 深度学习调用TensorFlow、PyTorch等框架
深度学习调用TensorFlow.PyTorch等框架 一.开发目标目标 提供统一接口的库,它可以从C++和Python中的多个框架中运行深度学习模型.欧米诺使研究人员能够在自己选择的框架内轻松建立模 ...
- 【学习总结】win7使用anaconda安装tensorflow+keras
tips: Keras是一个高层神经网络API(高层意味着会引用封装好的的底层) Keras由纯Python编写而成并基Tensorflow.Theano以及CNTK后端. 故先安装TensorFlo ...
随机推荐
- 为什么要使用Java SPI机制
Java SPI(Service Provider Interface)最早是在Java SE 6中被引入的,作为一种标准的.用于在运行时发现和加载服务提供者插件的标准机制.以前的程序猿实现JDBC连 ...
- 【经验】通过JVM调优,让凯哥个人博客响应速度提升了不少
为什么你的个人博客访问慢? 不知道大家有没有注意到,在22.10.31 21点之后,凯哥的个人博客站点(凯哥Java:www.kaigejava.com)访问速度提升了不少.那是因为凯哥对站点做了优化 ...
- pycharm批量注释
pycharm批量注释不像是spyder可以鼠标右键选择,pycharm是要用快捷键的,选中要注释的代码,然后快捷键就可以了. 注释代码和取消注释代码的快捷键都一样ctrl + /
- 【论文解读】Faster sorting algorithm
一.简要介绍 基本的算法,如排序或哈希,在任何一天都被使用数万亿次.随着对计算需求的增长,这些算法的性能变得至关重要.尽管在过去的2年中已经取得了显著的进展,但进一步改进这些现有的算法路线的有 ...
- frp_v0.37.1内网穿透,内网服务公网用不求人
前言: 公司内网无法访问,出差又需要用到公司内网进行办公,苦恼了好一阵.这时候想到了内网穿透,这就不得不提到几年前被安利的frp,一看GitHub竟然已经5年了,网上估计大把教程了. 那么什么是frp ...
- CSS & JS Effect – sticky horizontal scrollbar
需求 这个是 Google Ads 里的 table. 那个 horizontal scrollbar 可以 sticky bottom. 我们知道 scrollbar 是游览器原生的,我们能做的 s ...
- /proc/zoneinfo
root@pita2_mr813_tina35:/# cat /proc/zoneinfo Node 0, zone DMA per-node stats nr_inactive_anon 4749 ...
- yaml.load与yaml.dump的用法
import yaml #向yaml文件中写 with open("E:\个人\ rename.yaml", 'w') as f: project = {'在远方':"1 ...
- Kali Linux 各版本开启ssh 服务
Kali Linux 各版本开启ssh 服务 2019版kali Linux SSH链接办法 修改kali关于SSH服务默认配置并重启SSH服务,步骤如下: 打开sshd_config文件 leafp ...
- Monaco Editor 实现一个日志查看器
我们是袋鼠云数栈 UED 团队,致力于打造优秀的一站式数据中台产品.我们始终保持工匠精神,探索前端道路,为社区积累并传播经验价值. 本文作者:文长 前言 在 Web IDE 中,控制台中展示日志是至关 ...