ATtiny88初体验(三):串口
ATtiny88初体验(三):串口
ATtiny88单片机不包含串口模块,因此只能使用软件方式模拟串口时序。

串口通信时序通常由起始位、数据位、校验位和停止位四个部分组成,常见的配置为1位起始位、8位数据位、无校验位和1位停止位。
模拟串口发送时序
- 设置TX引脚为输出模式,初始电平状态为高电平。
- 设置定时器周期,以9600波特率为例,将定时器周期设为 \(\frac{1s}{9600} \approx 104us\) 。
- TX引脚输出低电平(起始位),同时开启定时器。
- 之后的8次定时器中断,每次输出1位数据,从低位开始。
- 第9次定时器中断,TX引脚输出高电平(停止位)。
- 第10次定时器中断,关闭定时器。
模拟串口接收时序
- 设置RX引脚为输入模式,使能上拉电阻,开启下降沿中断。
- 当接收到起始位时,触发下降沿中断,设置定时器周期为 \(\frac{1s}{9600} \times \frac{1}{6} \approx 17us\) ,开启定时器。
- 之后的30次定时器中断,对RX引脚的电平状态进行计数(起始位)。
- 第1次定时器中断,将定时器周期重设为 \(\frac{1s}{9600} \times \frac{1}{3} \approx 35us\) 。
- 第3次定时器中断,如果高电平数量大于低电平数量,则表示起始位接收失败,直接关闭定时器,并开启下降沿中断。
- 第6/9/.../24/27次定时器中断,判断高电平和低电平的数量,选取数量多的那个电平作为数据位,从低位开始填充。
- 第30次定时器中断,关闭定时器中断,开启下降沿中断,如果高电平数量大于低电平数量,则表示成功接收到停止位,数据有效。
外部中断
ATtiny88有8个外部中断源:INT0、INT1、PCI0、PCI1、PCI2、PCI3。其中INT0/1支持低电平/下降沿/上升沿触发,PCI0/1/2/3在引脚状态改变时触发。
ATtiny88外部中断和引脚的对应关系如下:
| 中断源 | 引脚 |
|---|---|
| INT0 | PD2 |
| INT1 | PD3 |
| PCI0 | PB[0:7] -> PCINT[0:7] |
| PCI1 | PC[0:7] -> PCINT[8:15] |
| PCI2 | PD[0:7] -> PCINT[16:23] |
| PCI3 | PA[0:3] -> PCINT[24:27] |
注意:即使引脚配置为输出模式,也能触发相应的中断。
寄存器

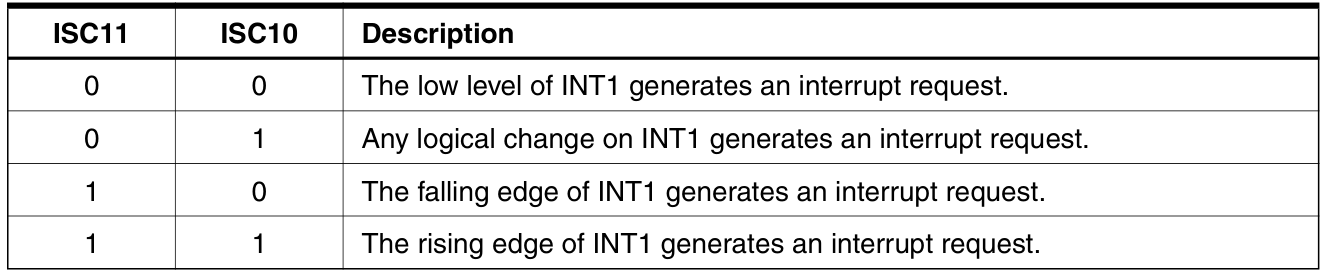
ISC1[1:0]:设置INT1中断触发方式。
ISC0[1:0]:设置INT0中断触发方式,取值同ISC1[1:0]。

INT1:设为1使能INT1中断。INT0:设为1使能INT0中断。

INTF1:INT1中断标志位,执行中断函数时自动清零,也可以写1清零。INTF0:INT0中断标志位,执行中断函数时自动清零,也可以写1清零。

PCIE3:设为1使能PCI3(PCINT[27:24])中断。PCIE2:设为1使能PCI2(PCINT[23:16])中断。PCIE1:设为1使能PCI1(PCINT[15:8])中断。PCIE0:设为1使能PCI0(PCINT[7:0])中断。

PCIF3:PCI3(PCINT[27:24])中断标志位,执行中断函数时自动清零,也可以写1清零。PCIF2:PCI2(PCINT[23:16])中断标志位,执行中断函数时自动清零,也可以写1清零。PCIF1:PCI1(PCINT[15:8])中断标志位,执行中断函数时自动清零,也可以写1清零。PCIF0:PCI0(PCINT[7:0])中断标志位,执行中断函数时自动清零,也可以写1清零。




PCINTx:设为1使能PCINTx中断。
代码实现
inc/serial.h 头文件的代码内容如下:
#pragma once
#include <stdint.h>
#define UART (&serial)
typedef struct {
const uint8_t *cfg;
uint8_t flag;
uint8_t tx_idx;
uint8_t tx_temp;
uint8_t tx_data;
uint8_t rx_idx;
uint8_t rx_temp;
uint8_t rx_data;
uint8_t rx_cnt;
} serial_t;
typedef enum {
SERIAL_BR_1200 = 0,
SERIAL_BR_2400,
SERIAL_BR_4800,
SERIAL_BR_9600,
SERIAL_BR_19200,
SERIAL_BR_38400,
SERIAL_BR_57600,
SERIAL_BR_115200
} serial_baudrate_t;
typedef enum {
SERIAL_FLAG_TXE = 0x01,
SERIAL_FLAG_RXNE = 0x02
} serial_flag_t;
extern serial_t serial;
void serial_setup(serial_t *serial, serial_baudrate_t br);
uint8_t serial_get_flag(serial_t *serial, serial_flag_t flag);
void serial_send_data(serial_t *serial, uint8_t data);
uint8_t serial_receive_data(serial_t *serial);
src/serial.c 源文件的代码内容如下,其中将PD1引脚定义为TX,将PD2引脚定义为RX:
#include <serial.h>
#include <avr/io.h>
#include <avr/interrupt.h>
serial_t serial;
static const uint8_t serial_cfg[] = {
0x03, 208, 35, 69, // 1200
0x03, 104, 17, 35, // 2400
0x03, 52, 9, 17, // 4800
0x02, 208, 35, 69, // 9600
0x02, 104, 17, 35, // 19200
0x02, 52, 9, 17, // 38400
0x02, 35, 6, 12, // 57600
0x01, 139, 23, 46, // 115200
};
void serial_setup(serial_t *serial, serial_baudrate_t br)
{
serial->cfg = &serial_cfg[br * 4];
serial->flag = SERIAL_FLAG_TXE; // initial value for serial->flag
// setup tx pin
PORTD |= _BV(PORTD1); // PD1 outputs high level
DDRD |= _BV(DDD1); // set PD1 as output
// setup rx pin
PORTD |= _BV(PORTD2); // enable PD2 pull-up resistance
DDRD &= ~_BV(DDD2); // set PD2 as input
// setup INT0
EICRA &= ~(_BV(ISC01) | _BV(ISC00));
EICRA |= _BV(ISC01); // the falling edge of INT0 generates an interrupt request
EIFR = _BV(INTF0); // clear INT0 interrupt flag
EIMSK |= _BV(INT0); // enable INT0 interrupt
// setup TIMER0
TCNT0 = 0; // clear counter
TIMSK0 = 0; // disable all interrupts of TIMER0
TIFR0 = _BV(OCF0B) | _BV(OCF0A); // clear TIMER0_COMPA & TIMER0_COMPB interrupt flags
TCCR0A = serial->cfg[0]; // set mode & prescaler of TIMER0
}
uint8_t serial_get_flag(serial_t *serial, serial_flag_t flag)
{
return serial->flag & flag;
}
void serial_send_data(serial_t *serial, uint8_t data)
{
serial->flag &= ~SERIAL_FLAG_TXE; // clear TXE flag
serial->tx_data = data; // store the data to transmit
serial->tx_temp = data;
serial->tx_idx = 0; // reset index of transmission
OCR0A = TCNT0 + serial->cfg[1] - 1; // set period of TIMER0_COMPA
PORTD &= ~_BV(PORTD1); // PD1 outputs low level
TIFR0 = _BV(OCF0A); // clear TIMER0_COMPA interrupt flag
TIMSK0 |= _BV(OCIE0A); // enable TIMER0_COMPA interrupt
}
uint8_t serial_receive_data(serial_t *serial)
{
uint8_t data = serial->rx_data; // read the data received
serial->flag &= ~SERIAL_FLAG_RXNE; // clear RXNE flag
return data;
}
static inline void serial_tx_timer_isr(serial_t *serial)
{
if (serial->tx_idx < 8) { // send databits
if (serial->tx_temp & 0x01) { // output the lowest bit
PORTD |= _BV(PORTD1);
} else {
PORTD &= ~_BV(PORTD1);
}
serial->tx_temp >>= 1;
} else if (serial->tx_idx == 8) { // send stopbit
PORTD |= _BV(PORTD1);
} else { // end of transmission
serial->flag |= SERIAL_FLAG_TXE; // set TXE flag
TIMSK0 &= ~_BV(OCIE0A); // disable TIMER0_COMPA interrupt
}
OCR0A += serial->cfg[1]; // set time of the next interrupt
serial->tx_idx++; // update index of transmission
}
static inline void serial_rx_int_isr(serial_t *serial)
{
OCR0B = TCNT0 + serial->cfg[2] - 1; // set time of the first TIMER0_COMPB interrupt
EIMSK &= ~_BV(INT0); // disable INT0 interrupt
TIFR0 = _BV(OCF0B); // clear TIMER0_COMPB interrupt flag
TIMSK0 |= _BV(OCIE0B); // enable TIMER0_COMPB interrupt
serial->rx_idx = 0; // reset index of reception
serial->rx_cnt = 0; // clear counter of 0/1
}
static inline void serial_rx_timer_isr(serial_t *serial)
{
serial->rx_cnt += PIND & _BV(PIND2) ? 0x10 : 0x01; // count 0/1
if (serial->rx_idx == 2) { // receive startbit
if (serial->rx_cnt > 0x20) { // if startbit is '1'
TIMSK0 &= ~_BV(OCIE0B); // disable TIMER0_COMPB interrupt
EIFR = _BV(INTF0); // clear INT0 interrupt flag
EIMSK |= _BV(INT0); // enable INT0 interrupt flag
}
serial->rx_cnt = 0; // reset counter of 0/1
} else if (serial->rx_idx == 29) { // receive stopbit
if (serial->rx_cnt > 0x20) { // if stopbit is '1'
serial->rx_data = serial->rx_temp; // the data received is valid, store it to serial->rx_data
serial->flag |= SERIAL_FLAG_RXNE; // set RXNE flag
}
TIMSK0 &= ~_BV(OCIE0B); // disable TIMER0_COMPB interrupt
EIFR = _BV(INTF0); // clear INT0 interrupt flag
EIMSK |= _BV(INT0); // clear INT0 interrupt flag
} else if (serial->rx_idx % 3 == 2) { // receive databits
serial->rx_temp >>= 1;
if (serial->rx_cnt > 0x20) {
serial->rx_temp |= 0x80;
}
serial->rx_cnt = 0; // reset counter of 0/1
}
OCR0B += serial->cfg[3]; // set time of the next interrupt
serial->rx_idx++; // update index of reception
}
ISR(TIMER0_COMPA_vect)
{
uint8_t sreg = SREG;
serial_tx_timer_isr(UART);
SREG = sreg;
}
ISR(INT0_vect)
{
uint8_t sreg = SREG;
serial_rx_int_isr(UART);
SREG = sreg;
}
ISR(TIMER0_COMPB_vect)
{
uint8_t sreg = SREG;
serial_rx_timer_isr(UART);
SREG = sreg;
}
注意:实测115200以下(含)的波特率发送都正常,但是9600以上(不含)的波特率接收不正常,建议日常使用9600波特率。
重定向stdio到串口
为了更方便的使用串口,可以将标准输入输出重定向到串口,在AVR GCC中的做法如下:
定义输入和输出的接口函数,原型如下:
int putc(char c, FILE *stream);
int getc(FILE *stream);
使用
FDEV_SETUP_STREAM创建一个stream。FILE s = FDEV_SETUP_STREAM(putc, getc, flag)
将上面创建的stream替换掉
stdout/stdin。stdout = stdin = &s;
代码实现
src/main.c 源文件的代码内容如下:
#include <stdint.h>
#include <stdio.h>
#include <avr/io.h>
#include <avr/interrupt.h>
#include <serial.h>
static void stdio_setup(void);
int main(void)
{
cli();
stdio_setup();
sei();
printf("Hello, ATtiny88!\r\n");
for (;;) {
putchar(getchar());
}
}
static int serial_putchar(char c, FILE *stream)
{
while (!serial_get_flag(UART, SERIAL_FLAG_TXE));
serial_send_data(UART, c);
return 0;
}
static int serial_getchar(FILE *stream)
{
while (!serial_get_flag(UART, SERIAL_FLAG_RXNE));
return serial_receive_data(UART);
}
static void stdio_setup(void)
{
static FILE f = FDEV_SETUP_STREAM(serial_putchar, serial_getchar, _FDEV_SETUP_RW);
serial_setup(UART, SERIAL_BR_9600);
stdout = &f;
stdin = &f;
}
参考资料
ATtiny88初体验(三):串口的更多相关文章
- Ruby on rails初体验(三)
继体验一和体验二中的内容,此节将体验二中最开始的目标来实现,体验二中已经将部门添加的部分添加到了公司的show页面,剩下的部分是将部门列表也添加到公司的显示页面,整体思路和体验二中相同,但是还是会有点 ...
- Spring Cloud Alibaba 初体验(三) Nacos 与 Dubbo 集成
一.新建项目 新建项目,只放置接口,用于暴露 Dubbo 服务接口 public interface GreetingService { String greeting(); } 二.provider ...
- CentOS 初体验三: Yum 安装、卸载软件
一:Yum 简介 Yum(全称为 Yellow dog Updater, Modified)是一个在Fedora和RedHat以及CentOS中的Shell前端软件包管理器.基于RPM包管理,能够从指 ...
- $.extend({},defaults, options) --(初体验三)
1.$.extend({},defaults, options) 这样做的目的是为了保护包默认参数.也就是defaults里面的参数. 做法是将一个新的空对象({})做为$.extend的第一个参数, ...
- Swift初体验(三)
/*******************************************************************************/ // 协议 protocol Des ...
- JSON初体验(三):FastJson解析
JSON解析之FastJson(阿里巴巴解析开源) 特点: Fastjson是一个Java语言编写的高性能功能完善的JSON库,它采用的 是一种"假定有序快速匹配"的算法,把JSO ...
- 第三次随笔--安装虚拟机及学习linux系统初体验
第三次随笔--安装虚拟机及学习linux系统初体验 ·学习基于VirtualBox虚拟机安装Ubuntu图文教程在自己笔记本上安装Linux操作系统 首先按照老师的提示步骤进行VirtualBox虚拟 ...
- 20155315庄艺霖第三次作业之Linux初体验
Linux初体验 安装Linux三两事 老师的作业要求基于VirtualBox安装Linux系统,我一开始下载了VB但是电脑运行不了,后来看网上的教程下载了VMware,才算开始了我的Linux之旅. ...
- 深入Asyncio(三)Asyncio初体验
Asyncio初体验 Asyncio在Python中提供的API很复杂,其旨在替不同群体的人解决不同的问题,也正是由于这个原因,所以很难区分重点. 可以根据asyncio在Python中的特性,将其划 ...
- Linux内核驱动学习(三)字符型设备驱动之初体验
Linux字符型设备驱动之初体验 文章目录 Linux字符型设备驱动之初体验 前言 框架 字符型设备 程序实现 cdev kobj owner file_operations dev_t 设备注册过程 ...
随机推荐
- 2021-06-22:现有司机N*2人,调度中心会将所有司机平分给A、B两个区域,第 i 个司机去A可得收入为income[i][0],第 i 个司机去B可得收入为income[i][1],返回所有调
2021-06-22:现有司机N*2人,调度中心会将所有司机平分给A.B两个区域,第 i 个司机去A可得收入为income[i][0],第 i 个司机去B可得收入为income[i][1],返回所有调 ...
- 2021-10-13:单词接龙。字典 wordList 中从单词 beginWord 和 endWord 的 转换序列 是一个按下述规格形成的序列:序列中第一个单词是 beginWord 。序列中最后
2021-10-13:单词接龙.字典 wordList 中从单词 beginWord 和 endWord 的 转换序列 是一个按下述规格形成的序列:序列中第一个单词是 beginWord .序列中最后 ...
- 2021-09-03:直线上最多的点数。给你一个数组 points ,其中 points[i] = [xi, yi] 表示 X-Y 平面上的一个点。求最多有多少个点在同一条直线上。力扣149。
2021-09-03:直线上最多的点数.给你一个数组 points ,其中 points[i] = [xi, yi] 表示 X-Y 平面上的一个点.求最多有多少个点在同一条直线上.力扣149. 福大大 ...
- 2019年蓝桥杯C/C++大学B组省赛真题(数的分解)
题目描述: 把2019分解成3个各不相同的正整数之和,并且要求每个正整数都不包含数字2和4,一共有多少种不同的分解方法? 注意交换3个整数的顺序被视为同一种方法,例如1000+1001+18 和100 ...
- git push origin master 提示输入用户名和密码
今天更换了一台电脑,重新配置了SSH keys:但是在push得时候提示我输入用户名和密码 taodeMacBook-Pro:my_trip_proj tao$ git push origin mas ...
- 警惕看不见的重试机制:为什么使用RPC必须考虑幂等性
0 文章概述 在RPC场景中因为重试或者没有实现幂等机制而导致的重复数据问题,必须引起大家重视,有可能会造成例如一次购买创建多笔订单,一条通知信息被发送多次等问题,这是技术人员必须面对和解决的问题. ...
- 2023-05-26:golang关于垃圾回收和析构函数的选择题,多数人会选错。
2023-05-26:golang关于垃圾回收和析构的选择题,代码如下: package main import ( "fmt" "runtime" " ...
- ImageIO的应用
ImageIO的应用 一.关于IO流 在讲imageio之前,我们先来复习一下IO流的使用. 这里我建立一个Java类,用来实现读取文档中的内容,并且能够识别换行,话不多说,上代码: package ...
- CKS 考试题整理 (03)-kube-bench 修复不安全项
Context 针对 kubeadm 创建的 cluster 运行 CIS 基准测试工具时,发现了多个必须立即解决的问题. Task 通过配置修复所有问题并重新启动受影响的组件以确保新的设置生效. 修 ...
- C++ 核心指南之资源管理(上)
C++ 核心指南(C++ Core Guidelines)是由 Bjarne Stroustrup.Herb Sutter 等顶尖 C++ 专家创建的一份 C++ 指南.规则及最佳实践.旨在帮助大家正 ...