无刷电调基础知识以及BLHeli固件烧录和参数调整
标题: 无刷电调基础知识以及BLHeli固件烧录和参数调整
作者: 梦幻之心星 sky-seeker@qq.com
标签: [#基础知识,#电调,#BLHeli,#固件,#烧录,#调参]
目录: [电调]
日期: 2021-02-01
基础知识
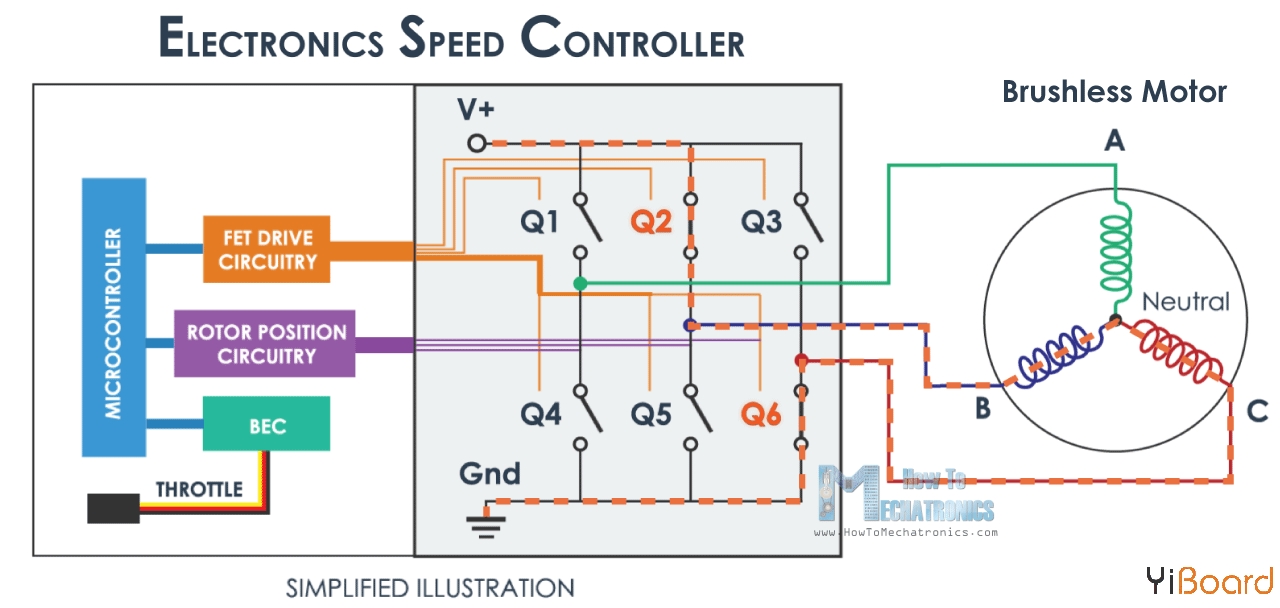
电调
- ESC代表电子速度控制器,简称为电调。电调从飞行控制器接收油门信号,并以所需速度驱动无刷电机。
电调固件
- 电调固件是在每个电调上运行的软件,它确定电调的性能,支持的协议以及可以使用的配置接口。电调可以使用的固件取决于硬件。
- SimonK:最古老的两种开源电调固件之一,已经过时不再更新。
- BLHeli:最古老的两种开源电调固件之一,由于其广泛的功能和友好的用户界面而变得流行。
- BLHeli_S:BLHeli固件的第二代。专门为具有Busybee处理器的电调开发。
- BLHeli_32:第三代和最新一代BLHeli固件。专门为32位电调编写,不再开源。
电调处理器
- 市场上大多数电调使用ATMEL、Silabs和ARM的处理器。不同的处理器具有不同的规格和功能,并且受不同的固件支持。
- ATMEL 8位:支持SimonK和BLHeli固件。
- SILABS 8位:支持BLHeli或BLHeli_S固件。
- 主要处理器是F330和F39X系列的F390和F396。
- Busybee处理器是F330和F39X的升级。有BusyBee1(EFM8BB10F8)和BusyBee2(EFM8BB21F16)两种。
- ARM 32位:支持BLHeli_32固件。
电调协议
- 电调协议是飞行控制器和电调用于通信的语言,决定了信号从飞控到电调的发送速度。
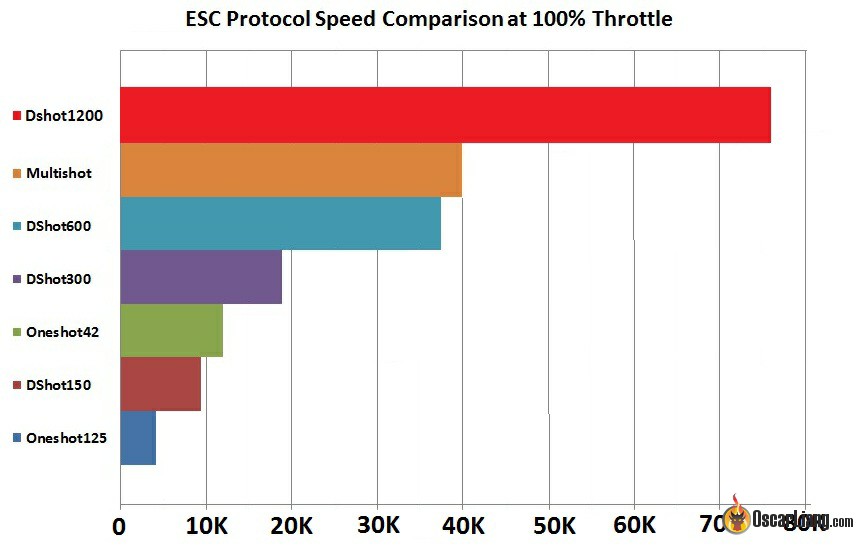
- 四轴飞行器使用的电调协议及信号宽度
- Standard PWM :1000us – 2000us
- Oneshot125:125us – 250us
- Oneshot 42:2us – 84us
- Multishot:5us – 25us
- Dshot
- Dshot150 :106.8us
- Dshot300 :53.4us
- Dshot600 :26.7us
- DShot1200:13.4us
- ProShot
电调BEC
- BEC表示 电池消除电路,本质上是电压调整器。作用是将主电池组的电压降压到5V输出。
- 通常内置在电调中,消除了为5V电子设备供电所需的单独电池的麻烦。
BLHeliSuite
手册
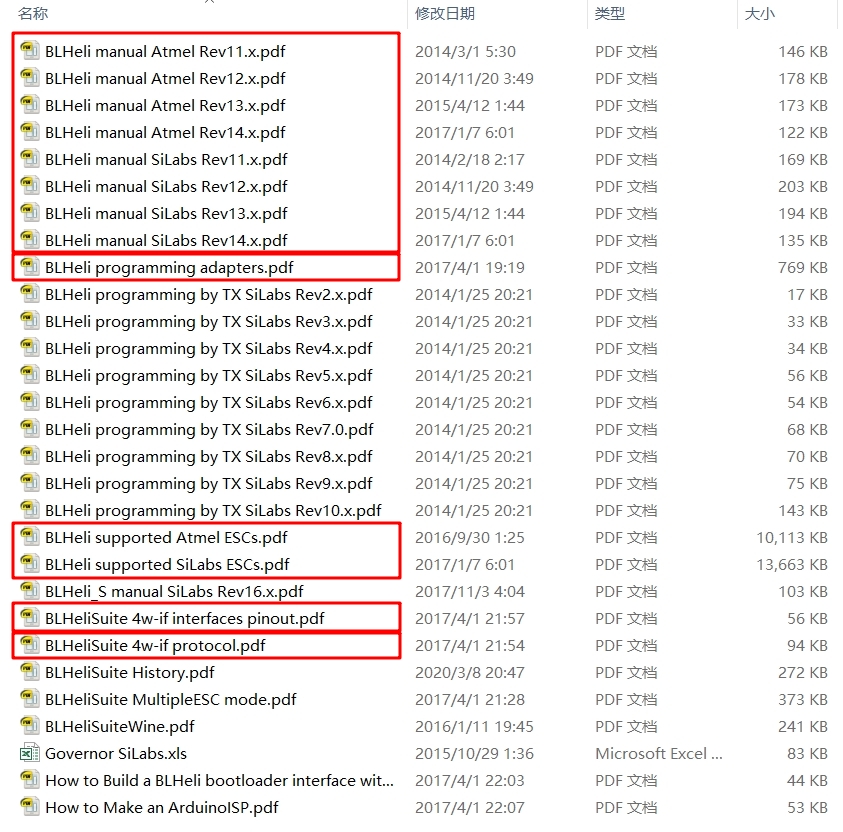
- BLHeliSuite的手册位于BLHeliSuite的Manuals目录
- BLHeliSuite的手册主要文件内容:
BLHeli manual xx xx.pdf:Atmel MCU和SiLabs MCU的电调的参数BLHeli programming adapters.pdf:适配器的制作和使用BLHeli supported xx ESCs.pdf:支持的Atmel和SiLabs电调的图片及参数BLHeliSuite 4w-if interfaces pinout.pdf:Arduino板上用于Atmel/SiLabs电调的BLHeliSuite的4w-if的引脚配置BLHeliSuite 4w-if protocol.pdf:用于Atmel/SiLabs电调的BLHeliSuite的4w-if的通信协议
适配器
首次刷新电调固件
- SiLabs MCUs电调支持以下适配器
- Arduinos:使用
SILABS C2 (4way-if)接口。初次使用Arduinos作为适配器时需要对Arduinos进行编程烧录。 - SiLabs Toolstick:使用
SILABS C2 (Toolstick)接口。 - USB Flashing stick:使用
SILABS C2 (Toolstick)接口。 - BLHeli Skywalker stick:使用
SILABS C2 (Toolstick)接口。
- Arduinos:使用
- Atmel MCUs电调支持以下适配器
- Arduinos:使用
ATMEL ISP Interface (AVRDude)接口。初次使用Arduinos作为适配器时需要对Arduinos进行编程烧录。 - USBasp:使用
ATMEL ISP Interface (AVRDude)接口。
- Arduinos:使用
刷新电调引导程序
- 刷新电调引导程序为BLHeli主要有
USB/Com和4way-if两种类型的接口。 - Arduinos(4way-if):使用
SILABS BLHeli Bootloader (4way-if)或ATMEL BLHeli Bootloader (4way-if)接口。使用Arduinos作为适配器时需要对Arduinos进行编程烧录。 - Arduinos(USB/UART 1-Wire bridge):使用
SILABS BLHeli Bootloader (USB/Com)或ATMEL BLHeli Bootloader (USB/Com)接口。使用Arduinos作为适配器时需要对Arduinos进行编程烧录。 - Favourite stick:使用
SILABS BLHeli Bootloader (USB/Com)或ATMEL BLHeli Bootloader (USB/Com)接口。 - FTDI stick:使用
SILABS BLHeli Bootloader (USB/Com)或ATMEL BLHeli Bootloader (USB/Com)接口。 - Multistar stick:使用
SILABS BLHeli Bootloader (USB/Com)或ATMEL BLHeli Bootloader (USB/Com)接口。
背景说明
- 适配器:Arduino Nano ATMEGA328P
- 电调:主控芯片SIL F330,功率管AON6504,供电1-4S,电流20A-30A,无BEC

操作说明
前期准备
- 下载Arduino Nano所用的USB转串口芯片CH340C的驱动程序CH341SER.ZIP,安装驱动。
- 下载BLHeliSuite,一般下载
BLHeliSuite16714902.zip即可。 - 根据电调外观和信息,查阅手册
BLHeli supported xx ESCs.pdf以确定电调型号。或者根据电调PCB确定电调的主控芯片型号。 - 根据电调的主控芯片型号,查阅手册
BLHeli programming adapters.pdf以确定需要用到的适配器和接口,以及适配器的制作方法。 - 根据所使用的适配器和所需操作使用的接口,查阅手册
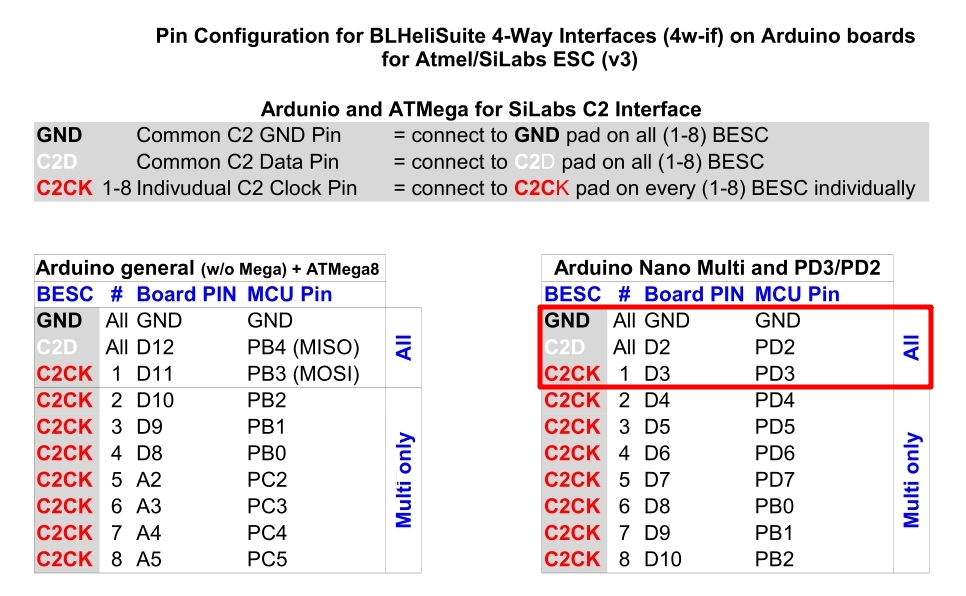
BLHeliSuite 4w-if interfaces pinout.pdf以确定引脚连接。
制作适配器
- 连接适配器和电脑,打开BLHeliSuite。
- 点击Make interfaces标签页。
- 点击Port选择USB-SERIAL CH340 对应的端口,点击Arduino Board选择Nano w/ ATmega328开发板,点击Baud选择115200波特率,点击Arduino 4way-interface。
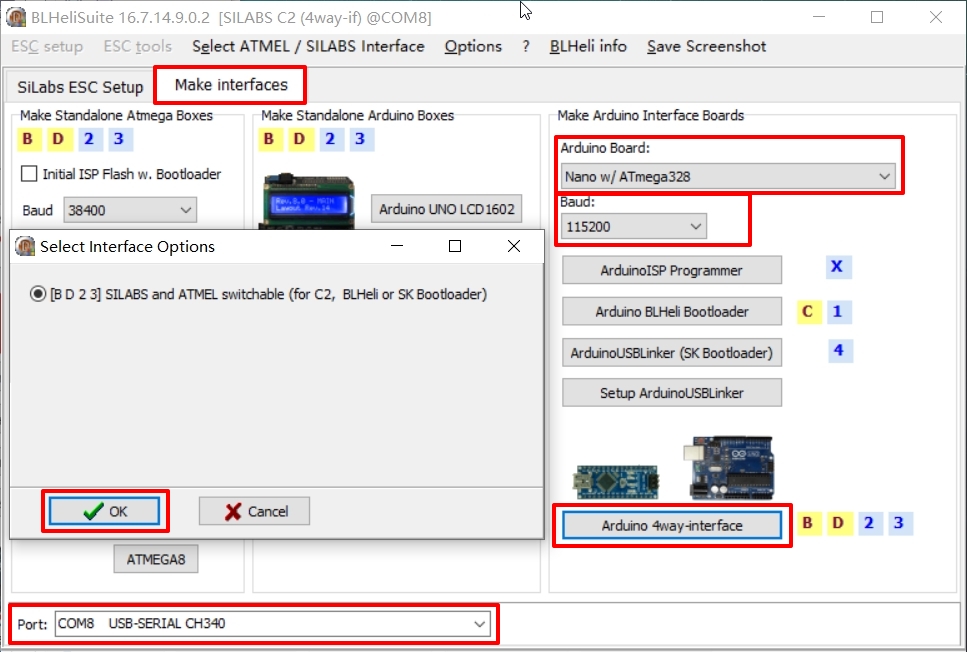
- 点击OK,选择最后一个文件后点击打开。
- 点击Yes。
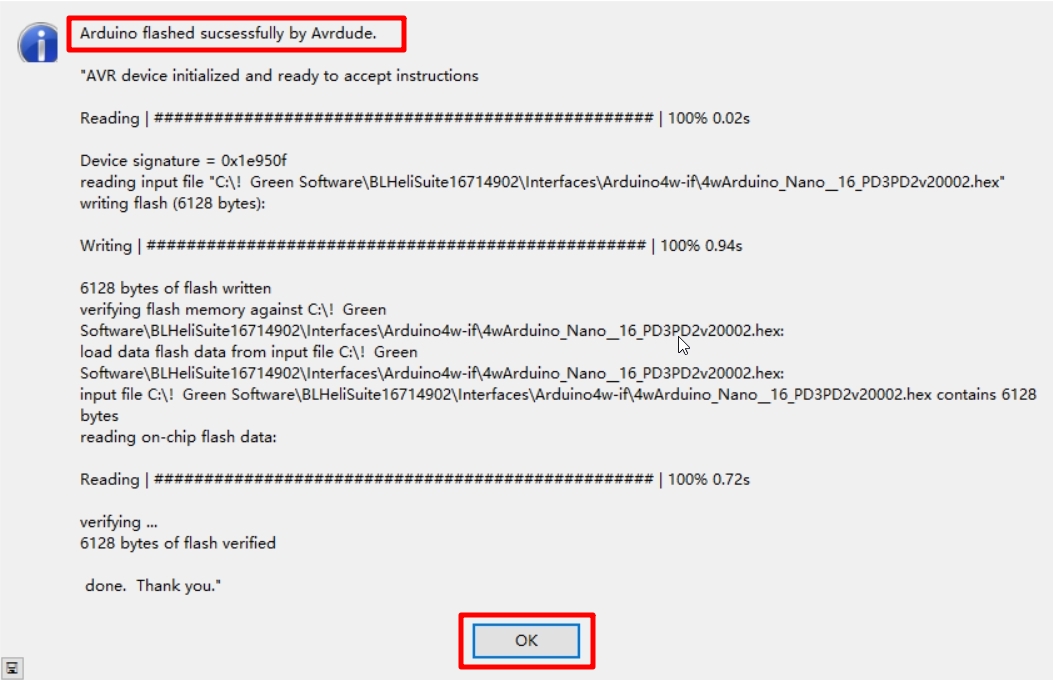
- 等待烧录Arduino,出现Arduino flashed sucsessfully by Avrdude表示已成功将Arduino Nano烧录为适配器。点击OK。
连接电调
- 连接适配器和电调(VCC GND C2D C2CK)。
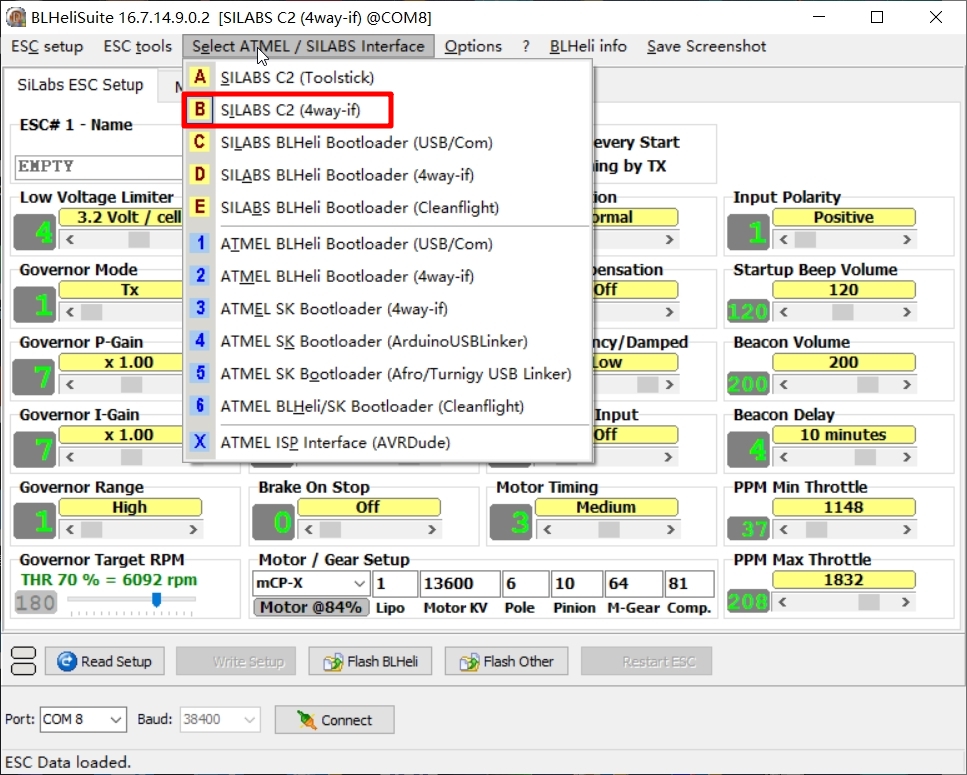
- 点击Select ATMEL/SILABS Interface选择SILABS C2 (4way-if)接口。
- 点击SiLabs ESC Setup标签页。
- 点击Port选择USB-SERIAL CH340 对应的端口,点击connect,点击Read setup读出电调参数设置。
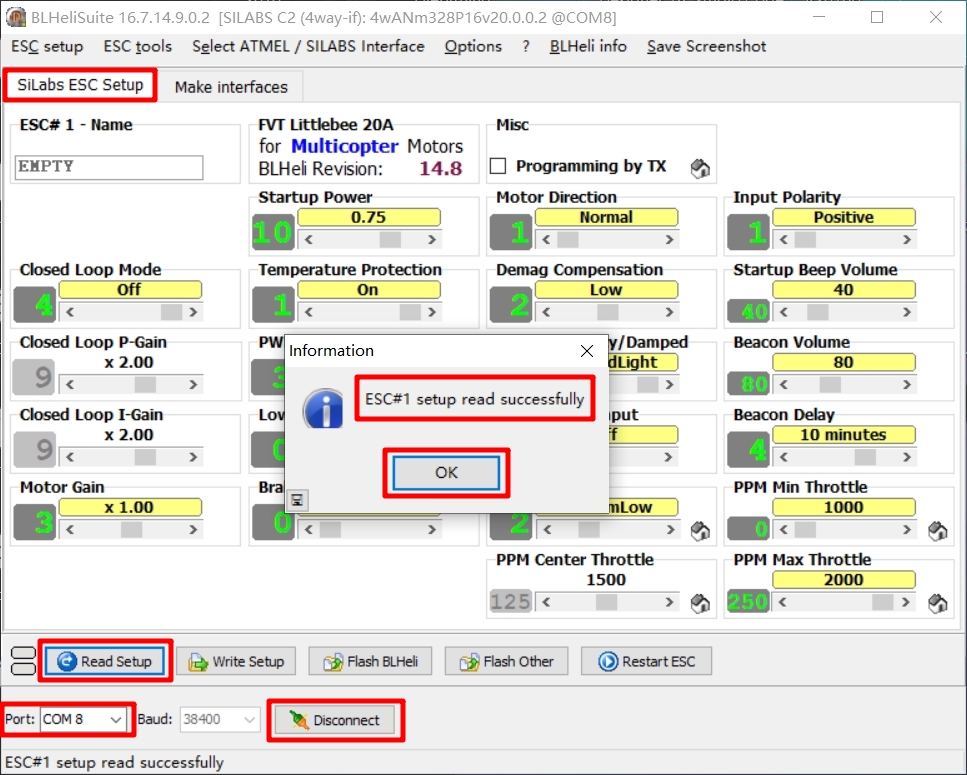
- 出现setup read successfully表示已成功连接到电调并读取到电调的参数。点击OK。
刷新固件
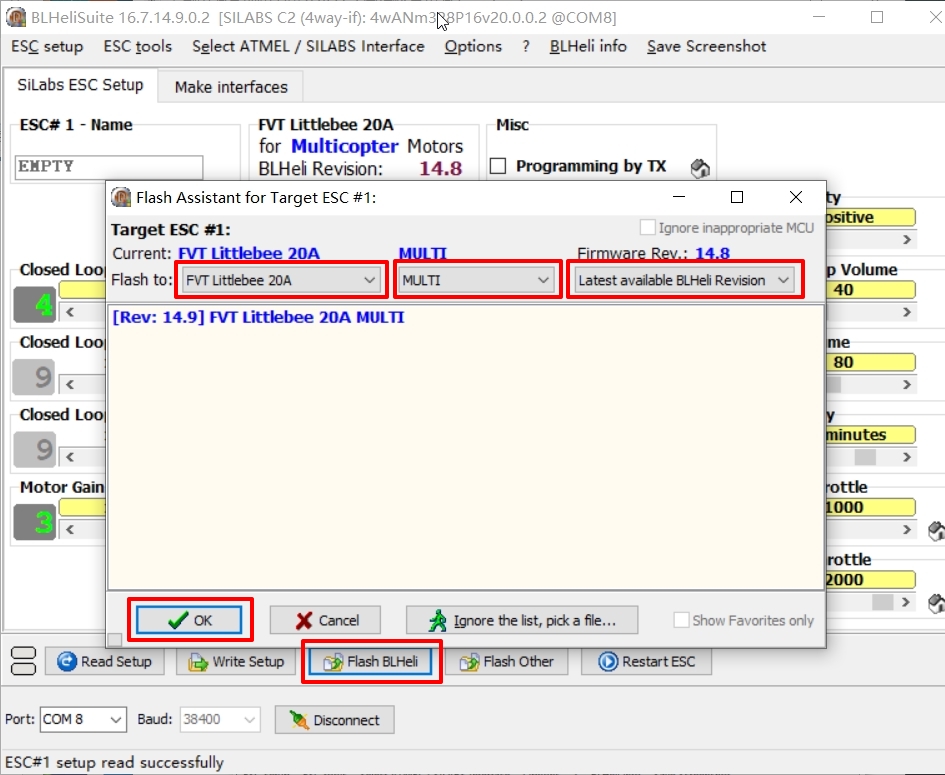
- 点击Flash BLHeli
- 在弹出的窗口中选择固件名称、固件类型(MAIN:直升机主桨;TAIL:直升机尾桨;MULTI:多桨)、固件版本,点击OK。
- 点击Yes。
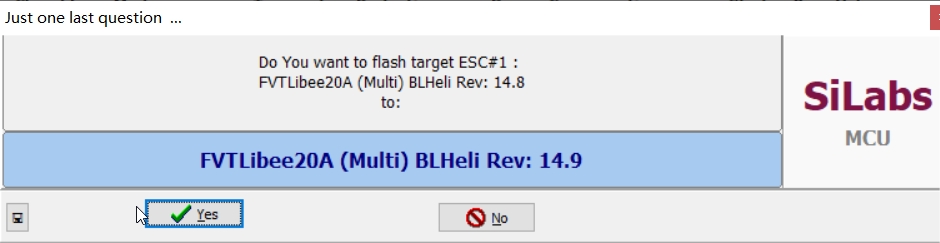
- 等待烧录固件,出现sucsessfully表示已成功将电调固件烧录到电调。点击OK。在下一个弹出的窗口中点击Yes。
调整参数
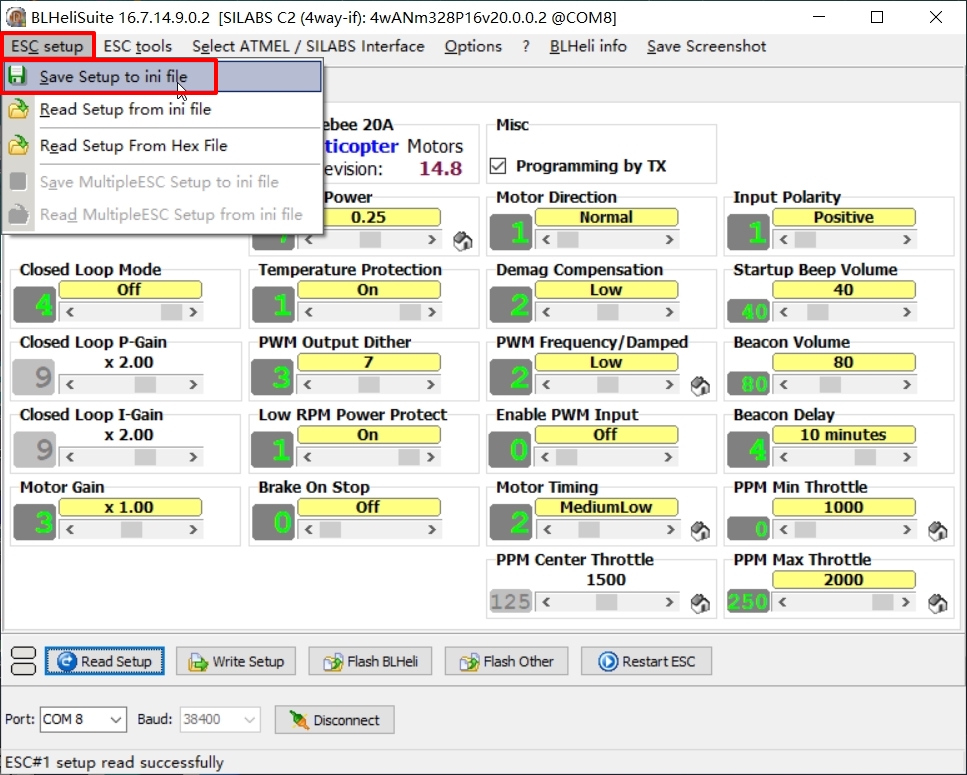
- 点击ESC Setup选择Save Setup to ini file 以备份电调当前的参数。
- 修改电调参数。降低启动功率,降低电调输出的PWM频率,开启低转速功率保护。
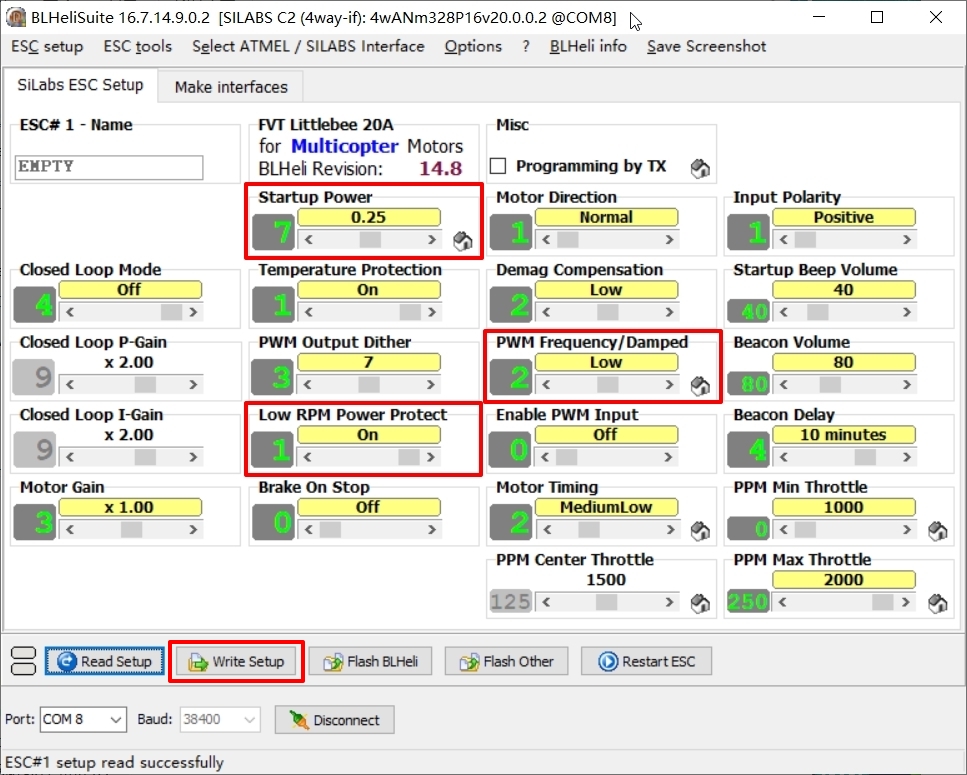
- 点击Write setup将参数写入电调。
多轴编程参数表
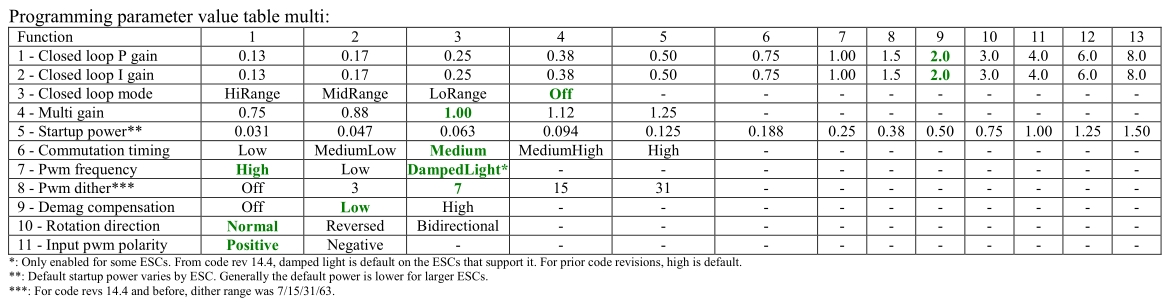
电调参数说明,详见官方手册
BLHeli manual xx xx.pdf英文参数 中文参数 参数说明 Startup power 启动功率 启动时允许的最大功率,实际的功率取决于油门的输入。 Motor timing 电机进角 通常设置中进角即适用于大部分电机,但如果电机运转不顺畅时,可以尝试改变进角。 Demag compensation 消磁补偿 防止电机换向后消磁时间过长而引起的电机停转。补偿值越高,保护越好。但补偿值太高,会降低最大功率。 Motor direction 电机转向 在双向模式下,油门中点为零点,中点以上为正转,中点以下为反转。 Startup Beep Volume 蜂鸣器音量 设置正常运行下蜂鸣音量。 Beacon/Signal Volume 信标音量 设置信标的音量。如果零油门信号的时间超过一个设定的时间,电调控制马达发出警报声。以便于找回丢失的飞行器。 Beacon delay 信标延迟 设置信标开始发出之前的延时。 PPM Min throttle;
PPM max throttle;
PPM center throttle最小油门;
最大油门;
中位油门设置电调的油门行程量。中位油门只用于双向模式。正常情况下, 油门信号值在1000us-2000us之间。 对于其他数值输入信号, 则需要做相应比例换算。 Temperature protection 温度保护 温度保护阀值可以设置为80℃-140℃。 Low RPM power protect 低转速功率保护 禁用可以保证低KV电机在低电压运行时实现全功率。但是禁用后会加剧同步丢失的风险,导致烧坏电机。 Brake on stop 停车制动 在通电状态,零油门时会有刹车功能。如果油门没有零点,此项设置无效。 Closed Loop Mode 闭环模式 设置控制环的运行速度范围。在闭环模式下,运行时的油门值对应电机的转速目标。关闭时将禁用控制环。 Closed Loop P-Gain 闭环比例增益 设置转速控制环的比例增益。控制从速度误差到电机功率的增益。 Closed Loop I-Gain 闭环积分增益 设置转速控制环的积分增益。控制从积分速度误差到电机功率的增益。 Motor Gain 电机增益 缩放给定输入施加到电机的功率。仅适用于PWM输入,对PPM输入则无效。会限制电机的最大功率。 PWM Output Dither PWM输出抖动 增加电机PWM关闭周期的长度。减少在PWM频率等于电机换向频率的谐波的转速区域中的问题,并且可以减少达到全油门的步进。不适用于闭环模式。 PWM Frequency/Damped PWM频率/阻尼 设置电调输出的PWM频率。高PWM频率约为20kHz,低PWM频率约为8kHz,轻阻尼模式始终使用高pwm频率。低频率PWM减小了到满功率的步进。轻阻尼模式会增加电机的损耗,从而加快减速速度。 Enable PWM Input 启用PWM输入 如果禁用,则仅接受1-2ms 脉宽的PPM和 OneShot125(125-250us)作为有效输入信号。启用后支持1kHz,2kHz,4kHz,8kHz和12kHz 的PWM输入信号。 Input Polarity 输入极性 用于反转油门。与提供负PWM的接收器一起使用。使用PPM输入时,必须将其设置为正。
注意事项
- 据说电调名称所写的FVT Littlebee 20A并不是真实型号,升级固件可能导致电调烧毁。
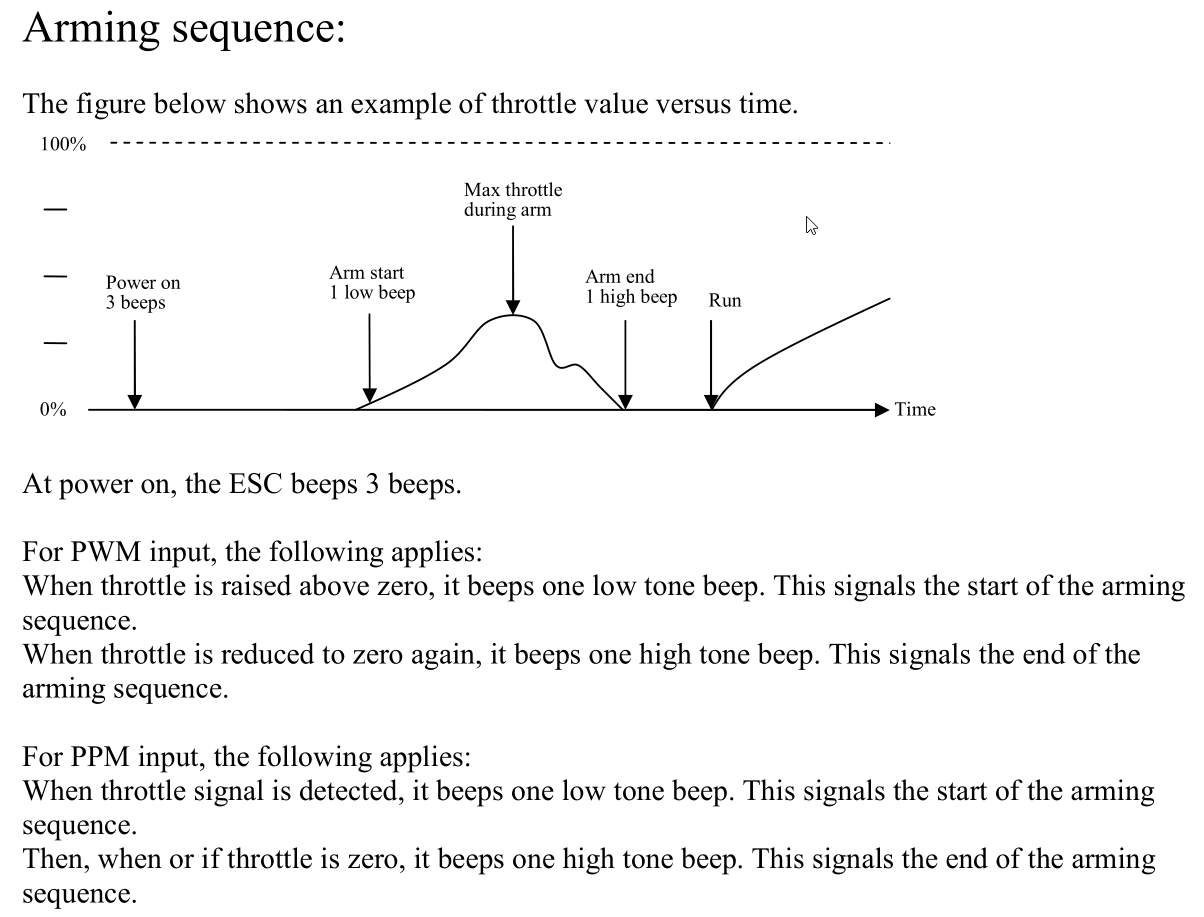
- 电调在驱动电机运转前需要执行解锁序列以进行解锁
- 上电时, 电调发出3声蜂鸣声。
- 当检测到油门信号时, 发出一声低音。 表示解锁信号序列开始。
- 当油门减小到零时, 发出一声高音。 表示解锁信号序列结束。
- SILABS电调接口标号为A、B、C、D,Atmel电调接口标号为1、2、3、4、5、X。通过接口所对应的标号,可以在Make interfaces界面方便快捷的得知需要制作的适配器。
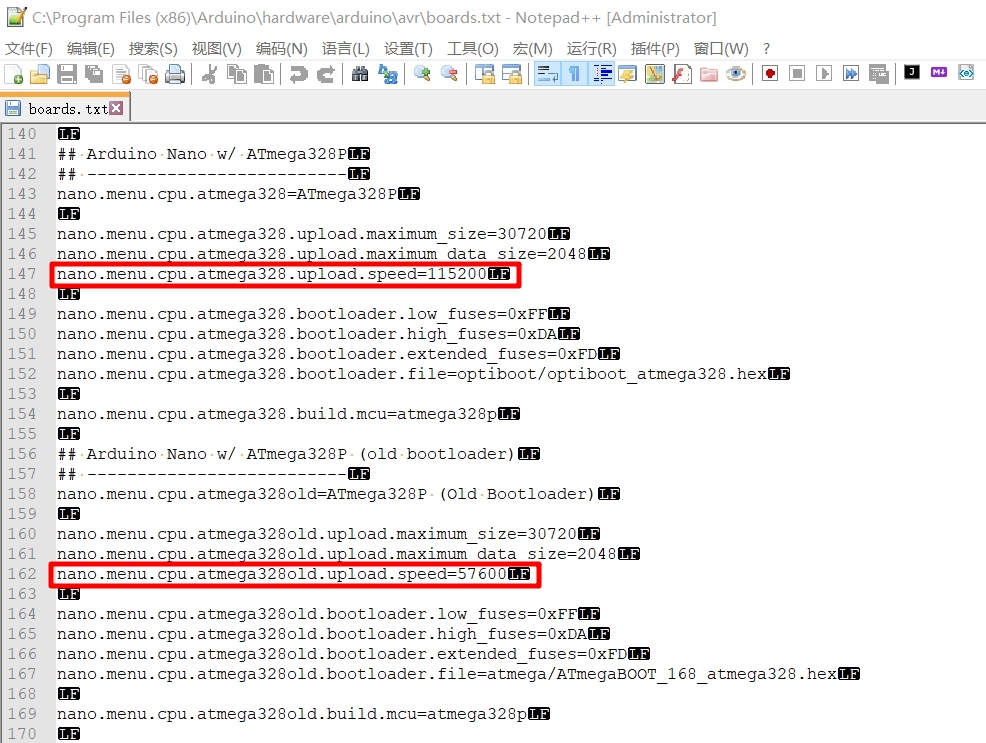
- 在使用Arduino Nano w/ ATmega328P作为适配器时。如果Arduino Nano使用的是旧版的引导程序,波特率设置为57600;如果Arduino Nano使用的是新版的引导程序,波特率设置为115200。
参考资料
- FPV无人机ESC购买指南-Oscar Liang
- ESC固件和协议概述-Oscar Liang
- 直流无刷电机工作原理
- 无刷电机和电子调速器(ESC)是如何工作的
- PPM信号介绍
- Arduino 开发板介绍及对比
- 用arduino uno R3做Blheli编程适配器编程航模电调
- BLHeli无刷电调固件烧写及调参(解决电机低速抖动及正反转)
- BLHeli无刷电调 调参介绍 某宝八元电调
- 懒人免焊接傻瓜包会从零开始给电调刷BLHELI固件
- MTO1804无刷电机引发的悲惨经历之二:电调固件刷新与优化
版权声明:本文为「梦幻之心星」原创,依据 CC BY-NC-SA 4.0 许可证进行授权,转载请附上原文出处链接及本声明。
博客园地址:https://www.cnblogs.com/Sky-seeker
微信公众号:关注微信公众号,获取即时推送

无刷电调基础知识以及BLHeli固件烧录和参数调整的更多相关文章
- 无刷电调修理方法 | 银燕(EMAX)12A无刷电调维修
一. 银燕(XP-12A)电调修理 笔者的电调在使用4S电池时烧毁,其中一个PMOS管明显烧焦. 将其拆除,买来新元件重新焊接,通电依然冒烟了. 引脚定义 丝印662F: XC6206P332MR 低 ...
- 8元电调调参教程(使用Arduino Uno)| BLHeli无刷电调的固件烧写及调参
前言 淘某上有款8元电调,性价比很高,但是需要简单设置一下 1.材料清单 (1)Arduino UNO开发板 (2)BLHeliSuite 16.7.14.9.0.1 调参软件及固件已上传Gitee: ...
- BLHeli/ BLHeli_S开源无刷电调学习记录
BLHeli的历史轨迹:BLHeli -> BLHeli_S -> BLHeli_32,我们重点学习BLHeli_S版本. 该代码支持常规的1-2ms脉冲宽度输入,以及Oneshot125 ...
- LeetCode刷题191130 --基础知识篇 二叉搜索树
休息了两天,状态恢复了一下,补充点基础知识. 二叉搜索树 搜索树数据结构支持许多动态集合操作,包括Search,minimum,maximum,predecessor(前驱),successor(后继 ...
- Monkey框架(基础知识篇) - monkey启动与参数介绍
一.monkey启动 直接PC启动:> adb shell monkey [options] <count> shell 端启动:> adb shell >monkey ...
- stm32通过电调带动电机(可按键调速)
这几天在做32通过电调带动电机的实验,上网一查,发现这方面的资料很少,经过自己的亲自实践,总结出以下经验,供大家参考. 论坛上也有很多人说自己在做,但是都遇到了同样的瓶颈.我想他们大多是pwm的频率和 ...
- flask基础知识
关于flask框架的基础知识 相关基础知识:定义路由,定义参数,获取参数,重定向 简单易懂 ---hello.py # -*- coding: utf-8 -*- # Flask hello worl ...
- linux内存基础知识和相关调优方案
内存是计算机中重要的部件之中的一个.它是与CPU进行沟通的桥梁. 计算机中全部程序的执行都是在内存中进行的.因此内存的性能对计算机的影响很大.内存作用是用于临时存放CPU中的运算数据,以及与硬盘等外部 ...
- MySQL 基础知识梳理
MySQL 的安装方式有多种,但是对于不同场景,会有最适合该场景的 MySQL 安装方式,下面就介绍一下 MySQL 常见的安装方法,包括 rpm 安装,yum 安装,通用二进制安装以及源码编译安装, ...
随机推荐
- Java 为每个原始类型提供了哪些包装类型:
java的包装类型: 原始类型: boolean,char,byte,short,int,long,float,double 包装类型:Boolean,Character,Byte,Short,Int ...
- 解决threadLocal父子变量传递问题
一.问题的提出 在系统开发过程中常使用ThreadLocal进行传递日志的RequestId,由此来获取整条请求链路.然而当线程中开启了其他的线程,此时ThreadLocal里面的数据将会出现无法获取 ...
- 定期删除文件夹中的文件——C#
下面是自定义的一个函数,参数分别为:文件夹名称.文件后缀.保存天数 逻辑是获取当前系统的时间,和文件创建时间去作差,如果结果大于保存天数,就删除它 /// <summary> /// 定期 ...
- eclipse中把spring源码关联至当前工程
1.下载并导入spring的相关jar包下载对应版本的spring 2.在当前工程中,选择Referenced Libraries,展开后,选择相应的jar包,右击并选择Properties 3. 在 ...
- Modbus 协议图文详解
1.概论 Modbus是一种串行通信协议,由于其协议简单易用,且没有版权要求,目前已经成为工业领域通信协议的实时标准.ModBus协议是又施耐德电气的前身Modicon公司在1979年提出的.Modb ...
- Facetoprocess_program_design
面向过程程序设计 程序:计算机用可理解可执行的命令的集合. 过程:问题解决的步骤. 方法(函数) 结构化程序设计的基础 一.方法三要素 1 功能: 实现的功能(单一).简单.易维护 2 参数: (传入 ...
- 算法设计与分析 - 主定理Master theorem (分治法递推时间复杂度)
英文原版不上了 直接中文 定义 假设有递推关系式T(n)=aT(n/b)+f(n) 其中n为问题规模 a为递推的子问题数量 n/b为每个子问题的规模(假设每个子问题的规模基本一样) f(n)为递推以外 ...
- 如何实现CentOS服务器的扩容??
Linux的硬盘识别: 一般使用"fdisk -l"命令可以列出系统中当前连接的硬盘 设备和分区信息.新硬盘没有分区信息,则只显示硬盘大小信息. 1.关闭服务器加上新硬盘 2.启动 ...
- FlatBuffers使用小结
最近做一个Android APP,由于离线业务需求,需要在启动APP时候同步大量数据到APP上,遇到了JSON性能瓶颈.从下方的图片中可以看出,当使用 json 传输数据,在解析json的时候会产生大 ...
- Java高并发与多线程(二)-----线程的实现方式
今天,我们开始Java高并发与多线程的第二篇,线程的实现方式. 通常来讲,线程有三种基础实现方式,一种是继承Thread类,一种是实现Runnable接口,还有一种是实现Callable接口,当然,如 ...