图像Demosaic算法及其matlab实现
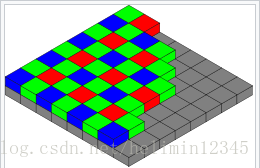
由于成本和面积等因素的限定,CMOS/CCD在成像时,感光面阵列前通常会有CFA(color filter array),如下图所示,CFA过滤不同频段的光,因此,Sensor的输出的RAW数据信号包含了3个通道的信息。由于人眼对绿色(大约550nm波长)光更敏感,因此CFA阵列包含1/2的G分量,1/4和R和1/4的B分量。
Sensor输出RAW数据后,需要经过Demosaic模块(ISP中)将其转成RGB图像。作为测试,我们可以对一幅全彩色RGB图进行RGB2Bayer转换,将其转换成RAW数据,再进行Bayer2RGB转换,输出RGB,对比输入和输出,可判断算法是否有效。
Bayer2RGB的转换方法有许多,下面给出基于3x3窗口简单插值的代码,支持BGGR、RGGB、GBRG三种bayer格式。输入一幅RGB图像,先进行RGB2Bayer转换,再进行Bayer2RGB转换。
%% ------------------------------------
% Author : lemonHe
% Time : 20180814
% Function : Demosaic
%%------------------------------------
clc;
clear;
close all;
imSrc = imread('detailTest.bmp');
% imSrc = imread('./bayer_data/bayer_1920x1080_12bit.tif');
figure,imshow(imSrc);
[hei, wid, chan] = size(imSrc);
bayer = uint8(zeros(hei,wid));
%% BGGR
% B G B G B G
% G R G R G R
% B G B G B G
% for ver = 1:hei;
% for hor = 1:wid
% if((1 == mod(ver,2)) && (1 == mod(hor,2)))
% bayer(ver,hor) = imSrc(ver,hor,3);
% elseif((0 == mod(ver,2)) && (0 == mod(hor,2)))
% bayer(ver,hor) = imSrc(ver,hor,1);
% else
% bayer(ver,hor) = imSrc(ver,hor,2);
% end
% end
% end
%
% figure,imshow(bayer);
%
% bayerPadding = zeros(hei+2,wid+2);
% bayerPadding(2:hei+1,2:wid+1) = bayer;
% bayerPadding(1,:) = bayerPadding(3,:);
% bayerPadding(hei+2,:) = bayerPadding(hei,:);
% bayerPadding(:,1) = bayerPadding(:,3);
% bayerPadding(:,wid+2) = bayerPadding(:,wid);
% imDst = zeros(hei+2, wid+2, chan);
%
% for ver = 2:hei+1
% for hor = 2:wid+1
% if(1 == mod(ver-1,2))
% if(1 == mod(hor-1,2))
% imDst(ver,hor,3) = bayerPadding(ver,hor);
% imDst(ver,hor,1) = (bayerPadding(ver-1,hor-1) + bayerPadding(ver-1,hor+1) + bayerPadding(ver+1,hor-1) + bayerPadding(ver+1,hor+1)) / 4;
% imDst(ver,hor,2) = (bayerPadding(ver-1,hor) + bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1) + bayerPadding(ver+1,hor)) / 4;
% else
% imDst(ver,hor,2) = bayerPadding(ver,hor);
% imDst(ver,hor,1) = (bayerPadding(ver-1,hor) + bayerPadding(ver+1,hor)) / 2;
% imDst(ver,hor,3) = (bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1)) / 2;
% end
% else
% if(1 == mod(hor-1,2))
% imDst(ver,hor,2) = bayerPadding(ver,hor);
% imDst(ver,hor,1) = (bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1)) / 2;
% imDst(ver,hor,3) = (bayerPadding(ver-1,hor) + bayerPadding(ver+1,hor)) / 2;
% else
% imDst(ver,hor,1) = bayerPadding(ver,hor);
% imDst(ver,hor,2) = (bayerPadding(ver-1,hor) + bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1) + bayerPadding(ver+1,hor)) / 4;
% imDst(ver,hor,3) = (bayerPadding(ver-1,hor-1) + bayerPadding(ver-1,hor+1) + bayerPadding(ver+1,hor-1) + bayerPadding(ver+1,hor+1)) / 4;
% end
% end
% end
% end
%
% imDst = uint8(imDst(2:hei+1,2:wid+1,:));
% figure,imshow(imDst);
%% RGGB
% R G R G R G
% G B G B G B
% R G R G R G
% for ver = 1:hei;
% for hor = 1:wid
% if((1 == mod(ver,2)) && (1 == mod(hor,2)))
% bayer(ver,hor) = imSrc(ver,hor,1);
% elseif((0 == mod(ver,2)) && (0 == mod(hor,2)))
% bayer(ver,hor) = imSrc(ver,hor,3);
% else
% bayer(ver,hor) = imSrc(ver,hor,2);
% end
% end
% end
%
% figure,imshow(bayer);
%
% bayerPadding = zeros(hei+2,wid+2);
% bayerPadding(2:hei+1,2:wid+1) = bayer;
% bayerPadding(1,:) = bayerPadding(3,:);
% bayerPadding(hei+2,:) = bayerPadding(hei,:);
% bayerPadding(:,1) = bayerPadding(:,3);
% bayerPadding(:,wid+2) = bayerPadding(:,wid);
% imDst = zeros(hei+2, wid+2, chan);
%
% for ver = 2:hei+1
% for hor = 2:wid+1
% if(1 == mod(ver-1,2))
% if(1 == mod(hor-1,2))
% imDst(ver,hor,1) = bayerPadding(ver,hor);
% imDst(ver,hor,3) = (bayerPadding(ver-1,hor-1) + bayerPadding(ver-1,hor+1) + bayerPadding(ver+1,hor-1) + bayerPadding(ver+1,hor+1)) / 4;
% imDst(ver,hor,2) = (bayerPadding(ver-1,hor) + bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1) + bayerPadding(ver+1,hor)) / 4;
% else
% imDst(ver,hor,2) = bayerPadding(ver,hor);
% imDst(ver,hor,3) = (bayerPadding(ver-1,hor) + bayerPadding(ver+1,hor)) / 2;
% imDst(ver,hor,1) = (bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1)) / 2;
% end
% else
% if(1 == mod(hor-1,2))
% imDst(ver,hor,2) = bayerPadding(ver,hor);
% imDst(ver,hor,3) = (bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1)) / 2;
% imDst(ver,hor,1) = (bayerPadding(ver-1,hor) + bayerPadding(ver+1,hor)) / 2;
% else
% imDst(ver,hor,3) = bayerPadding(ver,hor);
% imDst(ver,hor,2) = (bayerPadding(ver-1,hor) + bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1) + bayerPadding(ver+1,hor)) / 4;
% imDst(ver,hor,1) = (bayerPadding(ver-1,hor-1) + bayerPadding(ver-1,hor+1) + bayerPadding(ver+1,hor-1) + bayerPadding(ver+1,hor+1)) / 4;
% end
% end
% end
% end
%
% imDst = uint8(imDst(2:hei+1,2:wid+1,:));
% figure,imshow(imDst);
%% GBRG
% G B G B G B
% R G R G R G
% G B G B G B
for ver = 1:hei;
for hor = 1:wid
if((1 == mod(ver,2)) && (0 == mod(hor,2)))
bayer(ver,hor) = imSrc(ver,hor,3);
elseif((0 == mod(ver,2)) && (1 == mod(hor,2)))
bayer(ver,hor) = imSrc(ver,hor,1);
else
bayer(ver,hor) = imSrc(ver,hor,2);
end
end
end
figure,imshow(bayer);
bayerPadding = zeros(hei+2,wid+2);
bayerPadding(2:hei+1,2:wid+1) = bayer;
bayerPadding(1,:) = bayerPadding(3,:);
bayerPadding(hei+2,:) = bayerPadding(hei,:);
bayerPadding(:,1) = bayerPadding(:,3);
bayerPadding(:,wid+2) = bayerPadding(:,wid);
imDst = zeros(hei+2, wid+2, chan);
for ver = 2:hei+1
for hor = 2:wid+1
if(1 == mod(ver-1,2))
if(1 == mod(hor-1,2))
imDst(ver,hor,2) = bayerPadding(ver,hor);
imDst(ver,hor,1) = (bayerPadding(ver-1,hor) + bayerPadding(ver+1,hor)) / 2;
imDst(ver,hor,3) = (bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1)) / 2;
else
imDst(ver,hor,3) = bayerPadding(ver,hor);
imDst(ver,hor,2) = (bayerPadding(ver-1,hor) + bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1) + bayerPadding(ver+1,hor)) / 4;
imDst(ver,hor,1) = (bayerPadding(ver-1,hor-1) + bayerPadding(ver-1,hor+1) + bayerPadding(ver+1,hor-1) + bayerPadding(ver+1,hor+1)) / 4;
end
else
if(1 == mod(hor-1,2))
imDst(ver,hor,1) = bayerPadding(ver,hor);
imDst(ver,hor,2) = (bayerPadding(ver-1,hor) + bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1) + bayerPadding(ver+1,hor)) / 4;
imDst(ver,hor,3) = (bayerPadding(ver-1,hor-1) + bayerPadding(ver-1,hor+1) + bayerPadding(ver+1,hor-1) + bayerPadding(ver+1,hor+1)) / 4;
else
imDst(ver,hor,2) = bayerPadding(ver,hor);
imDst(ver,hor,1) = (bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1)) / 2;
imDst(ver,hor,3) = (bayerPadding(ver-1,hor) + bayerPadding(ver+1,hor)) / 2;
end
end
end
end
imDst = uint8(imDst(2:hei+1,2:wid+1,:));
figure,imshow(imDst);结果如下所示:


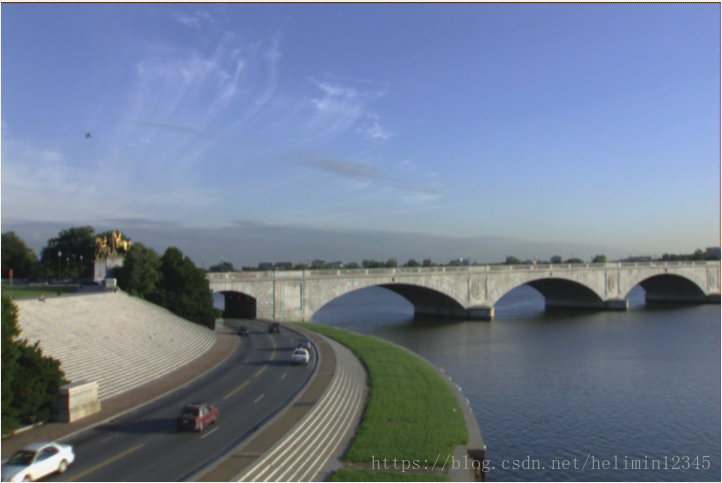
下图为Sensor输出的RGGB格式RAW数据,使用插值的方法对其进行还原

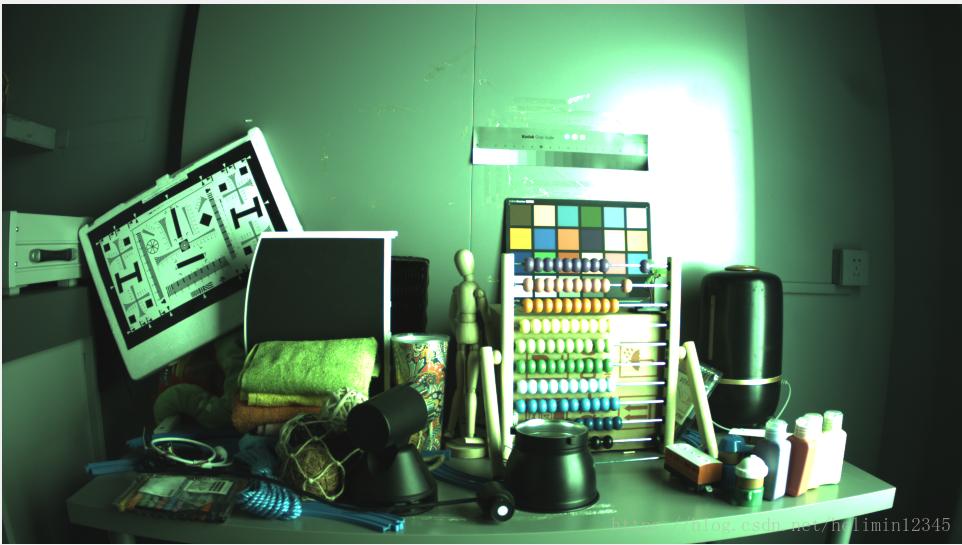
下面来看看客观指标测试,对于图像复原来说,通过可以根据PSNR和SSIM来评价算法性能。美国Kodak Data公司提供真彩无损图像数据,由专业的全彩色设备采集而来,每个pixel的R、G、B都是通过感光器件得到的,图像大小为512*768,每个通道为8bit。可以对该图像进行降采样,模拟CFA器件,再使用Demosaic算法对采样后的数据进行还原,计算PSNR和SSIM即可评价算法性能。
图像Demosaic算法及其matlab实现的更多相关文章
- 【图像配准】基于互信息的图像配准算法:MI、EMI、ECC算法
简单介绍: 基于互信息的图像配准算法以其较高的配准精度和广泛的适用性而成为图像配准领域研究的热点之中的一个.而基于互信息的医学图像配准方法被觉得是最好的配准方法之中的一个.基于此.本文将介绍简单的基于 ...
- 【VS开发】【图像处理】基于灰度世界、完美反射、动态阈值等图像自动白平衡算法的原理、实现及效果
基于灰度世界.完美反射.动态阈值等图像自动白平衡算法的原理.实现及效果 白平衡是电视摄像领域一个非常重要的概念,通过它可以解决色彩还原和色调处理的一系列问题.白平衡是随着电子影像再现色彩真实 ...
- GMM算法的matlab程序
GMM算法的matlab程序 在“GMM算法的matlab程序(初步)”这篇文章中已经用matlab程序对iris数据库进行简单的实现,下面的程序最终的目的是求准确度. 作者:凯鲁嘎吉 - 博客园 h ...
- Python实现图像边缘检测算法
title: "Python实现图像边缘检测算法" date: 2018-06-12T17:06:53+08:00 tags: ["图形学"] categori ...
- GMM算法的matlab程序(初步)
GMM算法的matlab程序 在https://www.cnblogs.com/kailugaji/p/9648508.html文章中已经介绍了GMM算法,现在用matlab程序实现它. 作者:凯鲁嘎 ...
- KFCM算法的matlab程序(用FCM初始化聚类中心)
KFCM算法的matlab程序(用FCM初始化聚类中心) 在“聚类——KFCM”这篇文章中已经介绍了KFCM算法,现在用matlab程序对iris数据库进行实现,用FCM初始化聚类中心,并求其准确度与 ...
- KFCM算法的matlab程序
KFCM算法的matlab程序 在“聚类——KFCM”这篇文章中已经介绍了KFCM算法,现在用matlab程序对iris数据库进行简单的实现,并求其准确度. 作者:凯鲁嘎吉 - 博客园 http:// ...
- FCM算法的matlab程序2
FCM算法的matlab程序2 在“FCM算法的matlab程序”这篇文章中已经用matlab程序对iris数据库进行实现,并求解准确度.下面的程序是另一种方法,是最常用的方法:先初始化聚类中心,在进 ...
- FCM算法的matlab程序
FCM算法的matlab程序 在“FCM算法的matlab程序(初步)”这篇文章中已经用matlab程序对iris数据库进行简单的实现,下面的程序最终的目的是求准确度. 作者:凯鲁嘎吉 - 博客园 h ...
随机推荐
- burpsuite无法拦截本地流量
参考文章链接:https://blog.csdn.net/tb_youth/article/details/103436796?utm_medium=distribute.pc_relevant.no ...
- 用Python实现童年小游戏贪吃蛇
贪吃蛇作为一款经典小游戏,早在 1976 年就面世了,我最早接触它还是在家长的诺基亚手机中.
- 神奇的 SQL 之 HAVING → 容易被轻视的主角
开心一刻 一天,楼主和隔壁小男孩一起坐电梯,中途进来一位高挑的美女,她牵着一条雪白的贵宾犬 小男孩看着这条雪白的贵宾犬,甚是喜欢,说道:阿姨,我能摸下这个狗狗吗? 美女:叫姐姐 小男孩低头看了下贵宾犬 ...
- 【electron+vue3+ts实战便笺exe】一、搭建框架配置
不要让自己的上限成为你的底线 前言 诈尸更新系列,为了跟上脚步,尝试了vue3,在学习vue3的时候顺便学习一手electron和ts,本教程将分别发布,源码会在最后的文章发布.因为还在开发中,目前也 ...
- SpringBoot入门到精通系列教程 - Filter/WebFilter
1. Filter简介 1.1. SpringBoot 中Filter的作用 1.2. @WebFilter 2. 基于@WebFilter的实现 2.1. SpringbootApplication ...
- [LeetCode]147. Insertion Sort List链表排序
插入排序的基本思想 把排好的放在一个新的变量中,每次拿出新的,排进去 这个新的变量要有超前节点,因为第一个节点可能会有变动 public ListNode insertionSortList(List ...
- [leetcode]62.UniquePaths
/** * Created by lvhao on 2017/7/6. * A robot is located at the top-left corner of a m x n grid (mar ...
- 使用UML工具分析类图与类的关系-bouml(java和C++)
在分析类之间的关系时可以借助工具来实现. bouml是一个UML分析工具,最新的版本是收费的,但是之前的版本是免费的. 这里使用的是4.23版. Bouml安装: 安装软件就按照流程走就行了.但是第一 ...
- java零基础之--JDK安装篇
---恢复内容开始--- 很多零基础学习者在开始学习java中很难理解JDK的安装和配置,以下是基于Windows 7 的安装配置流程(Windows 10类似) 1. 在安装之前我们先了解几个名词: ...
- Mapreduce实例--二次排序
前言部分: 在Map阶段,使用job.setInputFormatClass定义的InputFormat将输入的数据集分割成小数据块splites,同时InputFormat提供一个RecordRed ...